mirror of
https://github.com/PX4/PX4-Autopilot.git
synced 2026-05-28 10:46:33 +08:00
New Crowdin translations - uk (#25163)
Co-authored-by: Crowdin Bot <support+bot@crowdin.com>
This commit is contained in:
@@ -94,7 +94,7 @@ Reboot the flight controller in order for parameter changes to take effect.
|
||||
|
||||
#### Налаштування EKF2_EV_DELAY
|
||||
|
||||
[EKF2_EV_DELAY](../advanced_config/parameter_reference.md#EKF2_EV_DELAY) is the _Vision Position Estimator delay relative to IMU measurements_.
|
||||
[EKF2_EV_DELAY](../advanced_config/parameter_reference.md#EKF2_EV_DELAY) - це _затримка оцінювача позиції за допомогою візійної системи відносно вимірювань_.
|
||||
|
||||
Іншими словами, це різниця між міткою часу системи комп'ютерного зору та "фактичним" часом захоплення, який був би зафіксований годинником IMU ("базовим годинником" для EKF2).
|
||||
|
||||
@@ -187,7 +187,7 @@ MAVROS має плагіни для передачі візуальної оці
|
||||
Ви можете використовувати будь-який з наведених вище пайплайнів за допомогою LPE.
|
||||
|
||||
Якщо ви працюєте з EKF2, підтримуються лише "vision" пайплайни.
|
||||
To use MoCap data with EKF2 you will have to [remap](http://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
|
||||
To use MoCap data with EKF2 you will have to [remap](https://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
|
||||
|
||||
- MoCap ROS topics of type `geometry_msgs/PoseStamped` or `geometry_msgs/PoseWithCovarianceStamped` must be remapped to `/mavros/vision_pose/pose`.
|
||||
The `geometry_msgs/PoseStamped` topic is most common as MoCap doesn't usually have associated covariances to the data.
|
||||
@@ -205,7 +205,7 @@ To use MoCap data with EKF2 you will have to [remap](http://wiki.ros.org/roslaun
|
||||
| World | FRD or NED (X **N**orth, Y **E**ast, Z **D**own) | FLU or ENU (X **E**ast, Y **N**orth, Z **U**p), with the naming being `odom` or `map` |
|
||||
|
||||
:::tip
|
||||
See [REP105: Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
|
||||
See [REP105: Coordinate Frames for Mobile Platforms](https://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
|
||||
:::
|
||||
|
||||
Обидві системи координат показані на зображенні нижче (FRD зліва / FLU справа).
|
||||
@@ -236,7 +236,7 @@ With a remapping you can directly publish it on `mocap_pose_estimate` as it is w
|
||||
```
|
||||
|
||||
Make sure that you change the values of yaw, pitch and roll such that it properly attaches the external pose's body frame to the `base_link` or `base_link_frd`.
|
||||
Have a look at the [tf package](http://wiki.ros.org/tf#static_transform_publisher) for further help on how to specify the transformation between the frames.
|
||||
Have a look at the [tf package](https://wiki.ros.org/tf#static_transform_publisher) for further help on how to specify the transformation between the frames.
|
||||
Ви можете використовувати rviz, щоб перевірити, чи ви правильно прикріпили рамку. The name of the `external_pose_child_frame` has to match the child_frame_id of your `nav_msgs/Odometry` message.
|
||||
Те ж саме стосується і для опорної рамки зовнішньої позиції. You have to attach the reference frame of the external pose as child to either the `odom` or `odom_frd` frame. Адаптуйте тому відповідно кодовий рядок.
|
||||
|
||||
|
||||
@@ -7,7 +7,7 @@ The PX4 development team recommend that all users [upgrade to ROS 2](../ros2/ind
|
||||
|
||||
This documentation explains how to set up communication between the PX4 Autopilot and a ROS 1 enabled companion computer using MAVROS.
|
||||
|
||||
[MAVROS](http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status) is a ROS 1 package that enables MAVLink extendable communication between computers running ROS 1 for any MAVLink enabled autopilot, ground station, or peripheral.
|
||||
[MAVROS](https://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status) is a ROS 1 package that enables MAVLink extendable communication between computers running ROS 1 for any MAVLink enabled autopilot, ground station, or peripheral.
|
||||
_MAVROS_ is the "official" supported bridge between ROS 1 and the MAVLink protocol.
|
||||
|
||||
First we install PX4 and ROS, and then MAVROS.
|
||||
@@ -26,10 +26,9 @@ They cover the _ROS Melodic and Noetic_ releases.
|
||||
|
||||
:::tab ROS Noetic (Ubuntu 20.04)
|
||||
|
||||
If you're working with [ROS Noetic](http://wiki.ros.org/noetic) on Ubuntu 20.04:
|
||||
If you're working with [ROS Noetic](https://wiki.ros.org/noetic) on Ubuntu 20.04:
|
||||
|
||||
1. Install PX4 without the simulator toolchain:
|
||||
|
||||
1. [Download PX4 Source Code](../dev_setup/building_px4.md):
|
||||
|
||||
```sh
|
||||
@@ -52,7 +51,7 @@ If you're working with [ROS Noetic](http://wiki.ros.org/noetic) on Ubuntu 20.04:
|
||||
sudo apt-get install protobuf-compiler libeigen3-dev libopencv-dev -y
|
||||
```
|
||||
|
||||
3. Follow the [Noetic Installation instructions](http://wiki.ros.org/noetic/Installation/Ubuntu#Installation) (ros-noetic-desktop-full is recommended).
|
||||
3. Follow the [Noetic Installation instructions](https://wiki.ros.org/noetic/Installation/Ubuntu#Installation) (ros-noetic-desktop-full is recommended).
|
||||
|
||||
:::
|
||||
|
||||
@@ -81,7 +80,7 @@ If you're working with ROS "Melodic on Ubuntu 18.04:
|
||||
|
||||
- ROS Melodic is installed with Gazebo (Classic) 9 by default.
|
||||
- Your catkin (ROS build system) workspace is created at **~/catkin_ws/**.
|
||||
- The script uses instructions from the ROS Wiki "Melodic" [Ubuntu page](http://wiki.ros.org/melodic/Installation/Ubuntu).
|
||||
- The script uses instructions from the ROS Wiki "Melodic" [Ubuntu page](https://wiki.ros.org/melodic/Installation/Ubuntu).
|
||||
|
||||
:::
|
||||
|
||||
@@ -147,7 +146,6 @@ $ wstool init ~/catkin_ws/src
|
||||
```
|
||||
|
||||
2. Встановити MAVROS з джерела, використовуючи як випущену, так і останню версію:
|
||||
|
||||
- Випущений реліз/стабільний
|
||||
|
||||
```sh
|
||||
@@ -205,6 +203,6 @@ If you have an example app using the PX4 Autopilot and MAVROS, we can help you g
|
||||
|
||||
## Дивіться також
|
||||
|
||||
- [mavros ROS Package Summary](http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status)
|
||||
- [mavros ROS Package Summary](https://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status)
|
||||
- [mavros source](https://github.com/mavlink/mavros/)
|
||||
- [ROS Melodic installation instructions](http://wiki.ros.org/melodic/Installation)
|
||||
- [ROS Melodic installation instructions](https://wiki.ros.org/melodic/Installation)
|
||||
|
||||
@@ -123,7 +123,7 @@ int main(int argc, char **argv)
|
||||
```
|
||||
|
||||
The `mavros_msgs` package contains all of the custom messages required to operate services and topics provided by the MAVROS package.
|
||||
All services and topics as well as their corresponding message types are documented in the [mavros wiki](http://wiki.ros.org/mavros).
|
||||
All services and topics as well as their corresponding message types are documented in the [mavros wiki](https://wiki.ros.org/mavros).
|
||||
|
||||
```cpp
|
||||
mavros_msgs::State current_state;
|
||||
@@ -194,7 +194,7 @@ offb_set_mode.request.custom_mode = "OFFBOARD";
|
||||
```
|
||||
|
||||
We set the custom mode to `OFFBOARD`.
|
||||
A list of [supported modes](http://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
|
||||
A list of [supported modes](https://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
|
||||
|
||||
```cpp
|
||||
mavros_msgs::CommandBool arm_cmd;
|
||||
|
||||
@@ -154,7 +154,7 @@ if __name__ == "__main__":
|
||||
## Пояснення коду
|
||||
|
||||
The `mavros_msgs` package contains all of the custom messages required to operate services and topics provided by the MAVROS package.
|
||||
All services and topics as well as their corresponding message types are documented in the [mavros wiki](http://wiki.ros.org/mavros).
|
||||
All services and topics as well as their corresponding message types are documented in the [mavros wiki](https://wiki.ros.org/mavros).
|
||||
|
||||
```py
|
||||
import rospy
|
||||
@@ -236,7 +236,7 @@ for i in range(100):
|
||||
```
|
||||
|
||||
We prepare the message request used to set the custom mode to `OFFBOARD`.
|
||||
A list of [supported modes](http://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
|
||||
A list of [supported modes](https://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
|
||||
|
||||
```py
|
||||
offb_set_mode = SetModeRequest()
|
||||
|
||||
@@ -40,8 +40,7 @@ Enable MAVLink on the serial port that you connect to the companion computer (se
|
||||
|
||||
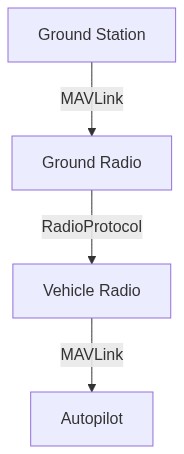
Приклад радіомодулів включає:
|
||||
|
||||
- [Lairdtech RM024](http://www.lairdtech.com/products/rm024)
|
||||
- [Digi International XBee Pro](http://www.digi.com/products/xbee-rf-solutions/modules)
|
||||
- [Digi International XBee Pro](https://www.digi.com/products/embedded-systems/digi-xbee/rf-modules/sub-1-ghz-rf-modules)
|
||||
|
||||
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoiZ3JhcGggVEQ7XG4gIGduZFtHcm91bmQgU3RhdGlvbl0gLS1NQVZMaW5rLS0-IHJhZDFbR3JvdW5kIFJhZGlvXTtcbiAgcmFkMSAtLVJhZGlvUHJvdG9jb2wtLT4gcmFkMltWZWhpY2xlIFJhZGlvXTtcbiAgcmFkMiAtLU1BVkxpbmstLT4gYVtBdXRvcGlsb3RdOyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
@@ -54,7 +53,7 @@ graph TD;
|
||||
|
||||
### Бортовий процесор
|
||||
|
||||
Невеликий комп'ютер, підключений до транспортного засобу, підключений до автопілота через послідовний порт або Ehthernet.
|
||||
A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ethernet port.
|
||||
Тут багато можливостей і це буде залежати від того, яку додаткову обробку ви хочете виконати на платі, а також від додаткової відправки команд до автопілота.
|
||||
Some examples are provided in [Companion Computers](../companion_computer/index.md#companion-computer-options).
|
||||
|
||||
|
||||
@@ -5,11 +5,11 @@
|
||||
## Вимоги
|
||||
|
||||
- Робочий Raspberry Pi з монітором, клавіатурою, або налаштованим SSH з'єднанням
|
||||
- Цей посібник передбачає, що у вас є Raspbian "JESSIE", встановлений на вашому RPi. If not: [install it](https://www.raspberrypi.org/downloads/raspbian/) or [upgrade](http://raspberrypi.stackexchange.com/questions/27858/upgrade-to-raspbian-jessie) your Raspbian Wheezy to Jessie.
|
||||
- Цей посібник передбачає, що у вас є Raspbian "JESSIE", встановлений на вашому RPi. If not: [install it](https://www.raspberrypi.org/downloads/raspbian/) or [upgrade](https://raspberrypi.stackexchange.com/questions/27858/upgrade-to-raspbian-jessie) your Raspbian Wheezy to Jessie.
|
||||
|
||||
## Встановлення
|
||||
|
||||
Follow [this guide](http://wiki.ros.org/ROSberryPi/Installing%20ROS%20Indigo%20on%20Raspberry%20Pi) for the actual installation of ROS Indigo. Примітка: встановіть варіант "ROS-Comm". Варіант Desktop занадто важкий.
|
||||
Follow [this guide](https://wiki.ros.org/ROSberryPi/Installing%20ROS%20Indigo%20on%20Raspberry%20Pi) for the actual installation of ROS Indigo. Примітка: встановіть варіант "ROS-Comm". Варіант Desktop занадто важкий.
|
||||
|
||||
### Помилки при встановленні пакетів
|
||||
|
||||
|
||||
Reference in New Issue
Block a user