mirror of
https://github.com/PX4/PX4-Autopilot.git
synced 2026-05-28 10:46:33 +08:00
New Crowdin translations - uk (#25558)
Co-authored-by: Crowdin Bot <support+bot@crowdin.com>
This commit is contained in:
@@ -110,7 +110,7 @@ Follow _Source Installation_ instructions from [mavlink/mavros](https://github.c
|
||||
|
||||
- `PX4-Autopilot/src/modules/mavlink/mavlink/message_definitions/v1.0`
|
||||
- `workspace/src/mavlink/message_definitions/v1.0`
|
||||
are exactly the same.
|
||||
are exactly the same.
|
||||
|
||||
:::
|
||||
|
||||
|
||||
@@ -148,21 +148,21 @@ $ wstool init ~/catkin_ws/src
|
||||
2. Встановити MAVROS з джерела, використовуючи як випущену, так і останню версію:
|
||||
- Випущений реліз/стабільний
|
||||
|
||||
```sh
|
||||
rosinstall_generator --upstream mavros | tee -a /tmp/mavros.rosinstall
|
||||
```
|
||||
```sh
|
||||
rosinstall_generator --upstream mavros | tee -a /tmp/mavros.rosinstall
|
||||
```
|
||||
|
||||
- Найновіше джерело
|
||||
|
||||
```sh
|
||||
rosinstall_generator --upstream-development mavros | tee -a /tmp/mavros.rosinstall
|
||||
```
|
||||
```sh
|
||||
rosinstall_generator --upstream-development mavros | tee -a /tmp/mavros.rosinstall
|
||||
```
|
||||
|
||||
```sh
|
||||
# For fetching all the dependencies into your catkin_ws,
|
||||
# just add '--deps' to the above scripts, E.g.:
|
||||
# rosinstall_generator --upstream mavros --deps | tee -a /tmp/mavros.rosinstall
|
||||
```
|
||||
```sh
|
||||
# For fetching all the dependencies into your catkin_ws,
|
||||
# just add '--deps' to the above scripts, E.g.:
|
||||
# rosinstall_generator --upstream mavros --deps | tee -a /tmp/mavros.rosinstall
|
||||
```
|
||||
|
||||
3. Create workspace & deps
|
||||
|
||||
|
||||
@@ -38,9 +38,9 @@ Enable MAVLink on the serial port that you connect to the companion computer (se
|
||||
1. Один підключений до UART порту автопілота
|
||||
2. Один підключений до наземної станції
|
||||
|
||||
Приклад радіомодулів включає:
|
||||
Приклад радіомодулів включає:
|
||||
|
||||
- [Digi International XBee Pro](https://www.digi.com/products/embedded-systems/digi-xbee/rf-modules/sub-1-ghz-rf-modules)
|
||||
- [Digi International XBee Pro](https://www.digi.com/products/embedded-systems/digi-xbee/rf-modules/sub-1-ghz-rf-modules)
|
||||
|
||||
[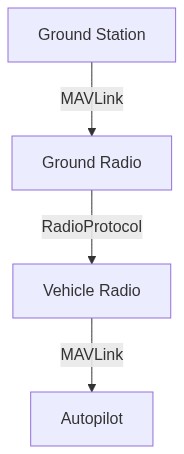](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoiZ3JhcGggVEQ7XG4gIGduZFtHcm91bmQgU3RhdGlvbl0gLS1NQVZMaW5rLS0-IHJhZDFbR3JvdW5kIFJhZGlvXTtcbiAgcmFkMSAtLVJhZGlvUHJvdG9jb2wtLT4gcmFkMltWZWhpY2xlIFJhZGlvXTtcbiAgcmFkMiAtLU1BVkxpbmstLT4gYVtBdXRvcGlsb3RdOyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
|
||||
|
||||
|
||||
Reference in New Issue
Block a user