# Режим висоти (мультикоптер)


") _Altitude mode_ is a _relatively_ easy-to-fly RC mode in which roll and pitch sticks control vehicle movement in the left-right and forward-back directions (relative to the "front" of the vehicle), yaw stick controls rate of rotation over the horizontal plane, and throttle controls speed of ascent-descent.
When the sticks are released/centered the vehicle will level and maintain the current _altitude_.
Якщо апарат рухається в горизонтальній площині, він буде продовжувати рух до тих пір, поки будь-який імпульс не буде погашений опором вітру.
Якщо дме вітер, літак буде дрейфувати у напрямку вітру.
:::tip
_Altitude mode_ is the safest non-GPS manual mode for new fliers. It is just like [Stabilized](../flight_modes_mc/manual_stabilized.md) mode but additionally locks the vehicle altitude when the sticks are released.
:::
The diagram below shows the mode behaviour visually (for a [mode 2 transmitter](../getting_started/rc_transmitter_receiver.md#transmitter_modes)).
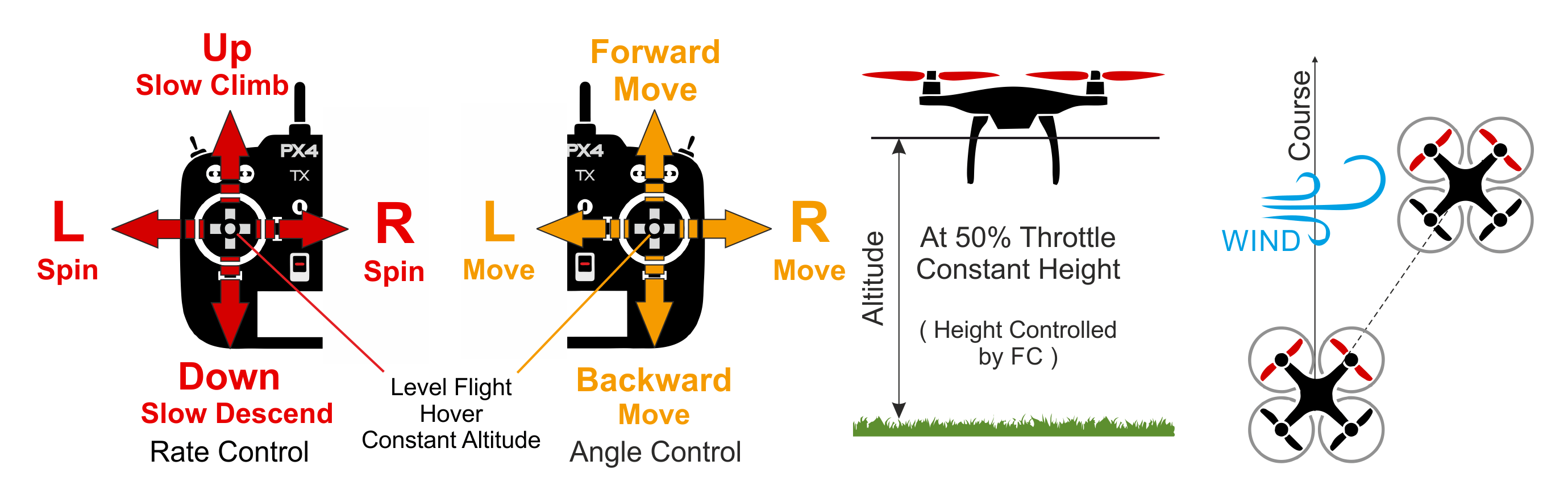
## Технічний підсумок
RC/manual mode like [Stabilized mode](../flight_modes_mc/manual_stabilized.md) but with _altitude stabilization_ (centred sticks level vehicle and hold it to fixed altitude).
Горизонтальне положення транспортного засобу може змінюватися через вплив вітру (або наявного імпульсу).
- Centered sticks:
- Рівень RPY прикріплюється до транспортного засобу.
- Дросель (~50%) утримує поточну висоту стабільно проти вітру.
- Зовнішній центр:
- Палиці кочення/крену керують кут нахилу у відповідних орієнтаціях, що призводить до відповідного руху ліворуч-праворуч та вперед-назад.
- Ручка дроселя керує швидкістю вгору/вниз з попередньо визначеною максимальною швидкістю (та швидкістю руху в інших осях).
- Палиця крену контролює швидкість кутової ротації вище горизонтальної площини.
- Зліт:
- Після посадки транспортний засіб злетить, якщо важіль керування газом підніметься вище 62.5% від повного діапазону (від низу).
- Висота зазвичай вимірюється за допомогою барометра, який може стати неточним в екстремальних погодних умовах.
Транспортні засоби, які включають датчик LIDAR/дальнісний датчик, зможуть керувати висотою з більшою надійністю та точністю.
- Потрібен ручний ввід управління (наприклад, за допомогою пульта дистанційного керування, джойстика).
- Крен, Тангаж: Допомога від автопілота для стабілізації польоту.
Положення палиці RC відображає орієнтацію транспортного засобу.
- Газ: Допомога від автопілота для утримання позиції проти вітру.
- Курс: Допомога від автопілота для стабілізації швидкості польоту.
Положення палиці RC відображає швидкість обертання транспортного засобу в цій орієнтації.
## Параметри
Режим впливає на наступні параметри:
| Параметр | Опис |
| ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| [MPC_Z_VEL_MAX_UP](../advanced_config/parameter_reference.md#MPC_Z_VEL_MAX_UP) | Максимальна швидкість вертикального підйому. За замовчуванням: 3 м/с. |
| [MPC_Z_VEL_MAX_DN](../advanced_config/parameter_reference.md#MPC_Z_VEL_MAX_DN) | Максимальна швидкість вертикального спуску. За замовчуванням: 1 m/s. |
| `MPC_XXXX` | Більшість параметрів MPC_xxx впливають на поведінку польоту в цьому режимі (принаймні до певної міри). For example, [MPC_THR_HOVER](../advanced_config/parameter_reference.md#MPC_THR_HOVER) defines the thrust at which a vehicle will hover. |
_Altitude mode_ is a _relatively_ easy-to-fly RC mode in which roll and pitch sticks control vehicle movement in the left-right and forward-back directions (relative to the "front" of the vehicle), yaw stick controls rate of rotation over the horizontal plane, and throttle controls speed of ascent-descent.
When the sticks are released/centered the vehicle will level and maintain the current _altitude_.
Якщо апарат рухається в горизонтальній площині, він буде продовжувати рух до тих пір, поки будь-який імпульс не буде погашений опором вітру.
Якщо дме вітер, літак буде дрейфувати у напрямку вітру.
:::tip
_Altitude mode_ is the safest non-GPS manual mode for new fliers. It is just like [Stabilized](../flight_modes_mc/manual_stabilized.md) mode but additionally locks the vehicle altitude when the sticks are released.
:::
The diagram below shows the mode behaviour visually (for a [mode 2 transmitter](../getting_started/rc_transmitter_receiver.md#transmitter_modes)).

## Технічний підсумок
RC/manual mode like [Stabilized mode](../flight_modes_mc/manual_stabilized.md) but with _altitude stabilization_ (centred sticks level vehicle and hold it to fixed altitude).
Горизонтальне положення транспортного засобу може змінюватися через вплив вітру (або наявного імпульсу).
- Centered sticks:
- Рівень RPY прикріплюється до транспортного засобу.
- Дросель (~50%) утримує поточну висоту стабільно проти вітру.
- Зовнішній центр:
- Палиці кочення/крену керують кут нахилу у відповідних орієнтаціях, що призводить до відповідного руху ліворуч-праворуч та вперед-назад.
- Ручка дроселя керує швидкістю вгору/вниз з попередньо визначеною максимальною швидкістю (та швидкістю руху в інших осях).
- Палиця крену контролює швидкість кутової ротації вище горизонтальної площини.
- Зліт:
- Після посадки транспортний засіб злетить, якщо важіль керування газом підніметься вище 62.5% від повного діапазону (від низу).
- Висота зазвичай вимірюється за допомогою барометра, який може стати неточним в екстремальних погодних умовах.
Транспортні засоби, які включають датчик LIDAR/дальнісний датчик, зможуть керувати висотою з більшою надійністю та точністю.
- Потрібен ручний ввід управління (наприклад, за допомогою пульта дистанційного керування, джойстика).
- Крен, Тангаж: Допомога від автопілота для стабілізації польоту.
Положення палиці RC відображає орієнтацію транспортного засобу.
- Газ: Допомога від автопілота для утримання позиції проти вітру.
- Курс: Допомога від автопілота для стабілізації швидкості польоту.
Положення палиці RC відображає швидкість обертання транспортного засобу в цій орієнтації.
## Параметри
Режим впливає на наступні параметри:
| Параметр | Опис |
| ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| [MPC_Z_VEL_MAX_UP](../advanced_config/parameter_reference.md#MPC_Z_VEL_MAX_UP) | Максимальна швидкість вертикального підйому. За замовчуванням: 3 м/с. |
| [MPC_Z_VEL_MAX_DN](../advanced_config/parameter_reference.md#MPC_Z_VEL_MAX_DN) | Максимальна швидкість вертикального спуску. За замовчуванням: 1 m/s. |
| `MPC_XXXX` | Більшість параметрів MPC_xxx впливають на поведінку польоту в цьому режимі (принаймні до певної міри). For example, [MPC_THR_HOVER](../advanced_config/parameter_reference.md#MPC_THR_HOVER) defines the thrust at which a vehicle will hover. |