# For example: omnibusf4sd_bl or kakutef7_bl
```
diff --git a/docs/zh/advanced_config/ethernet_setup.md b/docs/zh/advanced_config/ethernet_setup.md
index 4fd2413ef5c..077421a3db5 100644
--- a/docs/zh/advanced_config/ethernet_setup.md
+++ b/docs/zh/advanced_config/ethernet_setup.md
@@ -108,7 +108,7 @@ You also need to [configure the Ethernet port](#px4-mavlink-serial-port-configur
If you're using Ubuntu for your ground station (or companion computer) then you can use [netplan](https://netplan.io/) to configure the network.
Below we show how you write a setup to the netplan configuration file "`/etc/netplan/01-network-manager-all.yaml`", which would run on the same network as used by the PX4 setup above.
-Note that there are many more [examples](https://netplan.io/examples/) and instructions in the [netplan](https://netplan.io/) documentation.
+Note that there are many more [examples](https://github.com/canonical/netplan/tree/main/examples) and instructions in the [netplan](https://netplan.io/) documentation.
设置Ubuntu计算机:
diff --git a/docs/zh/advanced_config/prearm_arm_disarm.md b/docs/zh/advanced_config/prearm_arm_disarm.md
index df3fa4a5383..71ac176329b 100644
--- a/docs/zh/advanced_config/prearm_arm_disarm.md
+++ b/docs/zh/advanced_config/prearm_arm_disarm.md
@@ -109,7 +109,7 @@ Arming is prevented if:
- The current mode requires an adequate global position estimate but the vehicle does not have GPS lock.
- Many more (see [arming/disarming safety settings](../config/safety.md#arming-disarming-settings) for more information).
-The current failed checks can be viewed in QGroundControl (v4.2.0 and later) [Arming Check Report](../flying/pre_flight_checks.md#qgc-arming-check-report) (see also [Fly View > Arming and Preflight Checks](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/fly_view/fly_view.md#arm)).
+The current failed checks can be viewed in QGroundControl (v4.2.0 and later) [Arming Check Report](../flying/pre_flight_checks.md#qgc-arming-check-report) (see also [Fly View > Toolbar > Flight Status](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/fly_view/fly_view_toolbar.html#flight-status)).
Note that internally PX4 runs arming checks at 10Hz.
A list of the failed checks is kept, and if the list changes PX4 emits the current list using the [Events interface](../concept/events_interface.md).
@@ -159,7 +159,6 @@ The default startup sequence is:
- System now prearmed: non-throttling actuators can move (e.g. ailerons).
- System safety is off: Arming possible.
3. Arm command is issued.
-
- The system is armed.
- All motors and actuators can move.
@@ -177,7 +176,6 @@ The startup sequence is:
- _All actuators stay locked into disarmed position (same as disarmed)._
- System safety is off: Arming possible.
3. Arm command is issued.
-
- The system is armed.
- All motors and actuators can move.
diff --git a/docs/zh/advanced_config/tuning_the_ecl_ekf.md b/docs/zh/advanced_config/tuning_the_ecl_ekf.md
index fb7ea690274..fa6e1bce294 100644
--- a/docs/zh/advanced_config/tuning_the_ecl_ekf.md
+++ b/docs/zh/advanced_config/tuning_the_ecl_ekf.md
@@ -276,7 +276,7 @@ For more details about the configuration of height sources, [click here](#height
#### 偏航角测量
-Some GPS receivers such as the [Trimble MB-Two RTK GPS receiver](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) can be used to provide a heading measurement that replaces the use of magnetometer data.
+Some GPS receivers such as the [Trimble MB-Two RTK GPS receiver](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) can be used to provide a heading measurement that replaces the use of magnetometer data.
在存在大型磁场异常的环境中工作时,或在高纬度地区,地球磁场具有很大的磁倾角时,这可能是一个重要的优势。
Use of GPS yaw measurements is enabled by setting bit position 3 to 1 (adding 8) in the [EKF2_GPS_CTRL](../advanced_config/parameter_reference.md#EKF2_GPS_CTRL) parameter.
@@ -541,9 +541,9 @@ When this has been done, the performance metadata files can be processed to prov
### 输出数据
-- Attitude output data is found in the [VehicleAttitude](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleAttitude.msg) message.
-- Local position output data is found in the [VehicleLocalPosition](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleLocalPosition.msg) message.
-- Global \(WGS-84\) output data is found in the [VehicleGlobalPosition](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleGlobalPosition.msg) message.
+- Attitude output data is found in the [VehicleAttitude](https://github.com/PX4/PX4-Autopilot/blob/main/msg/versioned/VehicleAttitude.msg) message.
+- Local position output data is found in the [VehicleLocalPosition](https://github.com/PX4/PX4-Autopilot/blob/main/msg/versioned/VehicleLocalPosition.msg) message.
+- Global \(WGS-84\) output data is found in the [VehicleGlobalPosition](https://github.com/PX4/PX4-Autopilot/blob/main/msg/versioned/VehicleGlobalPosition.msg) message.
- Wind velocity output data is found in the [Wind.msg](https://github.com/PX4/PX4-Autopilot/blob/main/msg/Wind.msg) message.
### 状态
diff --git a/docs/zh/advanced_features/precland.md b/docs/zh/advanced_features/precland.md
index c6f4b490462..12af37e646f 100644
--- a/docs/zh/advanced_features/precland.md
+++ b/docs/zh/advanced_features/precland.md
@@ -103,10 +103,10 @@ At time of writing is no _convenient_ way to directly invoke precision landing (
### IR Sensor/Beacon Setup
-The IR sensor/landing beacon solution requires an [IR-LOCK Sensor](https://irlock.com/products/ir-lock-sensor-precision-landing-kit) and downward facing [distance sensor](../sensor/rangefinders.md) connected to the flight controller, and an IR beacon as a target (e.g. [IR-LOCK MarkOne](https://irlock.com/collections/markone)).
+The IR sensor/landing beacon solution requires an [IR-LOCK Sensor](https://irlock.com/products/ir-lock-sensor-precision-landing-kit) and downward facing [distance sensor](../sensor/rangefinders.md) connected to the flight controller, and an IR beacon as a target (e.g. [IR-LOCK MarkOne](https://irlock.com/collections/ir-markers)).
This enables landing with a precision of roughly 10 cm (GPS precision, by contrast, may be as large as several meters).
-Install the IR-LOCK sensor by following the [official guide](https://irlock.readme.io/v2.0/docs).
+Install the IR-LOCK sensor by following the [official guide](https://irlock.readme.io/docs/getting-started).
Ensure that the sensor's x axis is aligned with the vehicle's y axis and the sensor's y axis aligned with the vehicle's -x direction (this is the case if the camera is pitched down 90 degrees from facing forward).
Install a [range/distance sensor](../sensor/rangefinders.md) (the _LidarLite v3_ has been found to work well).
diff --git a/docs/zh/advanced_features/satcom_roadblock.md b/docs/zh/advanced_features/satcom_roadblock.md
index c1e9660e3c4..fcb45ba7cf9 100644
--- a/docs/zh/advanced_features/satcom_roadblock.md
+++ b/docs/zh/advanced_features/satcom_roadblock.md
@@ -9,7 +9,7 @@
卫星通信链接需要以下组成部件:
-- A [RockBlock 9603 Iridium Satellite Modem](https://www.iridium.com/products/rock-seven-rockblock-9603/) module connected to a Pixhawk flashed with the PX4 Autopilot.
+- A [RockBlock 9603 Iridium Satellite Modem](https://www.iridium.com/products/ground-control-rockblock-9603/) module connected to a Pixhawk flashed with the PX4 Autopilot.
- 运行 Ubuntu 系统的消息中继服务器。
- A ground station computer running _QGroundControl_ on Ubuntu Linux
@@ -21,7 +21,7 @@
The setup was tested with the current release of _QGroundControl_ running on Ubuntu 14.04 and 16.04.
- It may be possible to run the system on other ground stations and operating systems, but this has not been tested (and is not guaranteed to work).
-- The [RockBlock MK2](https://www.groundcontrol.com/us/product/rockblock-9602-satellite-modem/) module can also be used.
+- The [RockBlock MK2](https://www.groundcontrol.com/product/rockblock-9602-satellite-modem/) module can also be used.
The RockBlock 9603 module is recommended because it is smaller and lighter, while providing the same functionality.
:::
@@ -34,7 +34,7 @@ The UK link running cost consists of a line rental and per message cost:
- Each message transmitted over the system costs one _credit_ per 50 bytes.
Bundles of credits can be bought from RockBlock for £0.04-£0.11 per credit, depending on the bundle size.
-Refer to the [RockBlock Documentation](https://docs.rockblock.rock7.com/docs) for a detailed explanation of the modules, running costs and _RockBlock_ in general.
+Refer to the [RockBlock Documentation](https://docs.groundcontrol.com/iot/rockblock) for a detailed explanation of the modules, running costs and _RockBlock_ in general.
## Vehicle Setup
@@ -43,15 +43,15 @@ Refer to the [RockBlock Documentation](https://docs.rockblock.rock7.com/docs) fo
Connect the RockBlock module to a serial port of the Pixhawk.
Due to the power requirements of the module it can only be powered over a high-power serial port as a maximum of 0.5 A at 5 V are required.
If none is available/free then another power source which has the same ground level as the Pixhawk and can provide required power has to be setup.
-The details of the [connectors](https://docs.rockblock.rock7.com/docs/connectors) and the [power requirements](https://docs.rockblock.rock7.com/docs/power-supply) can be found in the RockBlock documentation.
+The details of the [connectors](https://docs.groundcontrol.com/iot/rockblock/specification/connectors-wiring) and the [power requirements](https://docs.groundcontrol.com/iot/rockblock/electrical) can be found in the RockBlock documentation.
### Module
The module can either use the internal antenna or an external one connected to the SMA connector.
-To [switch between the two antennas modes](https://docs.rockblock.rock7.com/docs/switching-rockblock-9603-antenna-mode) the position of a small RF link cable needs to changed.
+To [switch between the two antennas modes](https://docs.groundcontrol.com/iot/rockblock/user-manual/9603-atenna-mode) the position of a small RF link cable needs to changed.
If an external antenna is used always make sure that the antenna is connected to the module before powering it up to avoid damage to the module.
-The default baud rate of the module is 19200. However, the PX4 _iridiumsbd_ driver requires a baud rate of 115200 so it needs to be changed using the [AT commands](https://www.groundcontrol.com/en/wp-content/uploads/2022/02/IRDM_ISU_ATCommandReferenceMAN0009_Rev2.0_ATCOMM_Oct2012.pdf).
+The default baud rate of the module is 19200. However, the PX4 _iridiumsbd_ driver requires a baud rate of 115200 so it needs to be changed using the [AT commands](https://www.groundcontrol.com/wp-content/uploads/2022/02/IRDM_ISU_ATCommandReferenceMAN0009_Rev2.0_ATCOMM_Oct2012.pdf).
1. Connect to the module with using a 19200/8-N-1 setting and check if the communication is working using the command: `AT`.
The response should be: `OK`.
@@ -101,7 +101,6 @@ Set up a delivery group for the message relay server and add the module to that
The relay server should be run on either Ubuntu 16.04 or 14.04 OS.
1. The server working as a message relay should have a static IP address and two publicly accessible, open, TCP ports:
-
- `5672` for the _RabbitMQ_ message broker (can be changed in the _rabbitmq_ settings)
- `45679` for the HTTP POST interface (can be changed in the **relay.cfg** file)
@@ -124,7 +123,7 @@ The relay server should be run on either Ubuntu 16.04 or 14.04 OS.
sudo rabbitmqctl set_permissions iridiumsbd ".*" ".*" ".*"
```
-5. Clone the [SatComInfrastructure](https://github.com/acfloria/SatComInfrastructure.git) repository:
+5. Clone the [SatComInfrastructure](https://github.com/acfloria/SatComInfrastructure) repository:
```sh
git clone https://github.com/acfloria/SatComInfrastructure.git
@@ -241,7 +240,6 @@ If in the terminal where the `udp2rabbit.py` script is running within a couple o
5. The satellite communication system is now ready to use.
The priority link, which is the link over which commands are send, is determined the following ways:
-
- If no link is commanded by the user a regular radio telemetry link is preferred over the high latency link.
- The autopilot and QGC will fall back from the regular radio telemetry to the high latency link if the vehicle is armed and the radio telemetry link is lost (no MAVLink messages received for a certain time).
As soon as the radio telemetry link is regained QGC and the autopilot will switch back to it.
@@ -256,7 +254,6 @@ If in the terminal where the `udp2rabbit.py` script is running within a couple o
- Check the settings of the relay server and make sure that they are correct, especially the IMEI.
- No satellite communication messages from the airplane arrive on the ground station:
-
- Check using the system console if the _iridiumsbd_ driver started and if it did that a signal from any satellite is received by the module:
```sh
@@ -268,7 +265,6 @@ If in the terminal where the `udp2rabbit.py` script is running within a couple o
- Check if the link is connected and that its settings are correct.
- The IridiumSBD driver does not start:
-
- Reboot the vehicle.
If that helps increase the sleep time in the `extras.txt` before the driver is started.
If that does not help make sure that the Pixhawk and the module have the same ground level. Confirm also that the baudrate of the module is set to 115200.
diff --git a/docs/zh/assembly/quick_start_cuav_v5_plus.md b/docs/zh/assembly/quick_start_cuav_v5_plus.md
index e028eb8b6c7..9353e0403c7 100644
--- a/docs/zh/assembly/quick_start_cuav_v5_plus.md
+++ b/docs/zh/assembly/quick_start_cuav_v5_plus.md
@@ -54,7 +54,7 @@ The GPS/Compass module should be [mounted on the frame](../assembly/mount_gps_co
Connect to the flight control GPS interface using a cable.
:::info
-If you use the [NEO V2 PRO GNSS (CAN GPS)](http://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html), please use the cable to connect to the flight control CAN interface.
+If you use the [NEO V2 PRO GNSS (CAN GPS)](https://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html), please use the cable to connect to the flight control CAN interface.
:::

@@ -130,7 +130,7 @@ Download **V5+** pinouts from [here](http://manual.cuav.net/V5-Plus.pdf).
- [Airframe build-log using CUAV v5+ on a DJI FlameWheel450](../frames_multicopter/dji_f450_cuav_5plus.md)
- [CUAV V5+ Manual](http://manual.cuav.net/V5-Plus.pdf) (CUAV)
-- [CUAV V5+ docs](http://doc.cuav.net/flight-controller/v5-autopilot/en/v5+.html) (CUAV)
+- [CUAV V5+ docs](https://doc.cuav.net/controller/v5-autopilot/en/v5+.html) (CUAV)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165) (CUAV)
- [CUAV Github](https://github.com/cuav) (CUAV)
- [Base board design reference](https://github.com/cuav/hardware/tree/master/V5_Autopilot/V5%2B/V5%2BBASE) (CUAV)
diff --git a/docs/zh/assembly/quick_start_cube.md b/docs/zh/assembly/quick_start_cube.md
index 3b94528a161..48e78ecec36 100644
--- a/docs/zh/assembly/quick_start_cube.md
+++ b/docs/zh/assembly/quick_start_cube.md
@@ -13,7 +13,7 @@ This quick start guide shows how to power the _Cube_® flight cont
:::tip
The instructions apply to all Cube variants, including [Cube Black](../flight_controller/pixhawk-2.md), [Cube Yellow](../flight_controller/cubepilot_cube_yellow.md) and [Cube Orange](../flight_controller/cubepilot_cube_orange.md).
-Further/updated information may be available in the [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual) (Cube Docs).
+Further/updated information may be available in the [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube) (Cube Docs).
:::
## 配件
@@ -193,7 +193,7 @@ If connecting peripherals to the port labeled `GPS2`, assign the PX4 [serial por
## 配置
-Configuration is performed using [QGroundContro](http://qgroundcontrol.com/).
+Configuration is performed using [QGroundContro](https://qgroundcontrol.com/).
After downloading, installing and running _QGroundControl_, connect the board to your computer as shown.
@@ -218,6 +218,5 @@ To use this feature de-power the Cube, hold down the safety switch, then power t
- [Cube Yellow](../flight_controller/cubepilot_cube_yellow.md)
- [Cube Orange](../flight_controller/cubepilot_cube_orange.md)
- Cube Docs (Manufacturer):
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/zh/assembly/quick_start_durandal.md b/docs/zh/assembly/quick_start_durandal.md
index 552189d2ca2..3ac363b5ba7 100644
--- a/docs/zh/assembly/quick_start_durandal.md
+++ b/docs/zh/assembly/quick_start_durandal.md
@@ -147,7 +147,7 @@ The instructions below show how to connect the different types of receivers to _

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
@@ -213,6 +213,6 @@ QuadPlane specific configuration is covered here: [QuadPlane VTOL Configuration]
- [Durandal Overview](../flight_controller/durandal.md)
- [Durandal Technical Data Sheet](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Durandal_technical_data_sheet_90f8875d-8035-4632-a936-a0d178062077.pdf) (Holybro)
-- [Durandal Pinouts](https://holybro.com/collections/autopilot-flight-controllers/products/Durandal-Pinouts) (Holybro)
-- [Durandal_MB_H743sch.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/durandal/Durandal_MB_H743sch.pdf) (Durandal Schematics)
-- [STM32H743IIK_pinout.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/durandal/STM32H743IIK_pinout.pdf) (Durandal Pinmap)
+- [Durandal Pinouts](https://cdn.shopifycdn.net/s/files/1/0604/5905/7341/files/Durandal_Pinouts_v1.0.pdf?v=1693983344) (Holybro)
+- [Durandal_MB_H743sch.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/durandal/Durandal_MB_H743sch.pdf) (Durandal Schematics)
+- [STM32H743IIK_pinout.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/durandal/STM32H743IIK_pinout.pdf) (Durandal Pinmap)
diff --git a/docs/zh/assembly/quick_start_holybro_pix32_v5.md b/docs/zh/assembly/quick_start_holybro_pix32_v5.md
index 07a15a681f4..bc1f1951a67 100644
--- a/docs/zh/assembly/quick_start_holybro_pix32_v5.md
+++ b/docs/zh/assembly/quick_start_holybro_pix32_v5.md
@@ -123,7 +123,7 @@ The instructions below show how to connect the different types of receivers to _

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
@@ -181,5 +181,5 @@ QuadPlane specific configuration is covered here: [QuadPlane VTOL Configuration]
- [Pix32 v5 Technical Data Sheet](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Holybro_PIX32-V5_technical_data_sheet_v1.1.pdf)
- [Pix32 v5 Pinouts](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Holybro_Pix32-V5-Base-Mini-Pinouts.pdf)
- [Pix32 v5 Base Schematic Diagram](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Holybro_PIX32-V5-BASE-Schematic_diagram.pdf)
-- [Pix32 v5 Base Components Layout](https://holybro.com/manual/Holybro_PIX32-V5-BASE-ComponentsLayout.pdf)
+- [Pix32 v5 Base Components Layout](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Holybro_PIX32-V5-BASE-RC02-ComponentsLayout.pdf)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165).
diff --git a/docs/zh/assembly/quick_start_pixhawk.md b/docs/zh/assembly/quick_start_pixhawk.md
index 840f0d7b353..f5e06314dbb 100644
--- a/docs/zh/assembly/quick_start_pixhawk.md
+++ b/docs/zh/assembly/quick_start_pixhawk.md
@@ -83,7 +83,7 @@ The instructions below show how to connect the different types of receivers to P
- PPM-SUM and S.BUS receivers connect to the **RC** ground, power and signal pins as shown.

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/zh/assembly/quick_start_pixhawk4.md b/docs/zh/assembly/quick_start_pixhawk4.md
index 22952cd556d..b7f29f6ac6e 100644
--- a/docs/zh/assembly/quick_start_pixhawk4.md
+++ b/docs/zh/assembly/quick_start_pixhawk4.md
@@ -135,7 +135,7 @@ The instructions below show how to connect the different types of receivers to _

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
@@ -178,7 +178,7 @@ The wiring and configuration of optional/less common components is covered withi
## 针脚定义
-[Pixhawk 4 Pinouts](https://holybro.com/manual/Pixhawk4-Pinouts.pdf) (Holybro)
+[Pixhawk 4 Pinouts](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Pixhawk4-Pinouts.pdf) (Holybro)
## 配置
@@ -191,6 +191,6 @@ QuadPlane specific configuration is covered here: [QuadPlane VTOL Configuration]
## 更多信息
- [Pixhawk 4](../flight_controller/pixhawk4.md) (Overview page)
-- [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf)
-- [Pixhawk 4 Pinouts](https://holybro.com/manual/Pixhawk4-Pinouts.pdf) (Holybro)
+- [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/blob/main/docs/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf)
+- [Pixhawk 4 Pinouts](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Pixhawk4-Pinouts.pdf) (Holybro)
- [Pixhawk 4 Quick Start Guide (Holybro)](https://holybro.com/manual/Pixhawk4-quickstartguide.pdf)
diff --git a/docs/zh/assembly/quick_start_pixhawk4_mini.md b/docs/zh/assembly/quick_start_pixhawk4_mini.md
index c6a09cb3b13..70ae4691f8b 100644
--- a/docs/zh/assembly/quick_start_pixhawk4_mini.md
+++ b/docs/zh/assembly/quick_start_pixhawk4_mini.md
@@ -107,7 +107,7 @@ The instructions below show how to connect the different types of receivers to _

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/zh/assembly/quick_start_pixhawk5x.md b/docs/zh/assembly/quick_start_pixhawk5x.md
index 7a8c45ecfae..8a534d59e6a 100644
--- a/docs/zh/assembly/quick_start_pixhawk5x.md
+++ b/docs/zh/assembly/quick_start_pixhawk5x.md
@@ -92,7 +92,7 @@ You will need to [select a compatible transmitter/receiver](../getting_started/r
- Spektrum/DSM receivers connect to the **DSM/SBUS RC** input.
- PPM or SBUS receivers connect to the **RC IN** input port.
-PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC IN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC IN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/zh/assembly/quick_start_pixhawk6c.md b/docs/zh/assembly/quick_start_pixhawk6c.md
index 733c3a95869..4a845f83e11 100644
--- a/docs/zh/assembly/quick_start_pixhawk6c.md
+++ b/docs/zh/assembly/quick_start_pixhawk6c.md
@@ -81,7 +81,7 @@ You will need to [select a compatible transmitter/receiver](../getting_started/r
- Spektrum/DSM receivers connect to the **DSM** input.
- PPM or SBUS receivers connect to the **PPM/SBUS** input port.
-PPM and PWM receivers that have an _individual wire for each channel_ must connect to the \*PPM/SBUS\*\* port \*via a PPM encoder\* [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+PPM and PWM receivers that have an _individual wire for each channel_ must connect to the \*PPM/SBUS\*\* port \*via a PPM encoder\* [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/zh/assembly/quick_start_pixhawk6x.md b/docs/zh/assembly/quick_start_pixhawk6x.md
index 3e192f799a8..b6ae5a519ab 100644
--- a/docs/zh/assembly/quick_start_pixhawk6x.md
+++ b/docs/zh/assembly/quick_start_pixhawk6x.md
@@ -105,7 +105,7 @@ You will need to [select a compatible transmitter/receiver](../getting_started/r
- Spektrum/DSM receivers connect to the **DSM/SBUS RC** input.
- PPM or SBUS receivers connect to the **RC IN** input port.
-PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC IN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC IN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/zh/assembly/quick_start_pixracer.md b/docs/zh/assembly/quick_start_pixracer.md
index 91275fbdb1b..2c4e99a4f50 100644
--- a/docs/zh/assembly/quick_start_pixracer.md
+++ b/docs/zh/assembly/quick_start_pixracer.md
@@ -41,7 +41,7 @@ The instructions below show how to connect the different types of receivers:

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
### 电源模块 (ASCP4)
diff --git a/docs/zh/assembly/vibration_isolation.md b/docs/zh/assembly/vibration_isolation.md
index ffd1ff9c641..c65df46d723 100644
--- a/docs/zh/assembly/vibration_isolation.md
+++ b/docs/zh/assembly/vibration_isolation.md
@@ -31,5 +31,5 @@ Flight Control boards with in-built accelerometers or gyros are sensitive to vib
一些可能对您有用的参考资料:
-- [An Introduction to Shock & Vibration Response Spectra, Tom Irvine](http://www.vibrationdata.com/tutorials2/srs_intr.pdf) (free paper)
+- [An Introduction to Shock & Vibration Response Spectra, Tom Irvine](https://www.vibrationdata.com/tutorials2/srs_intr.pdf) (free paper)
- [Structural Dynamics and Vibration in Practice - An Engineering Handbook, Douglas Thorby](https://books.google.ch/books?id=PwzDuWDc8AgC&printsec=frontcover) (preview).
diff --git a/docs/zh/camera/camera_intel_realsense_t265_vio.md b/docs/zh/camera/camera_intel_realsense_t265_vio.md
index d7370263ee4..f881bef91c8 100644
--- a/docs/zh/camera/camera_intel_realsense_t265_vio.md
+++ b/docs/zh/camera/camera_intel_realsense_t265_vio.md
@@ -1,16 +1,18 @@
# Intel® RealSense™ Tracking Camera T265 (VIO)
-The [Intel® RealSense™ Tracking Camera T265](https://www.intelrealsense.com/tracking-camera-t265/) provides odometry information that can be used for [VIO](../computer_vision/visual_inertial_odometry.md), augmenting or replacing other positioning systems on PX4.
-
:::tip
-This camera is recommended, and is used in the [Visual Inertial Odometry (VIO) > Suggested Setup](../computer_vision/visual_inertial_odometry.md#suggested-setup).
+This camera is discontinued.
:::
+The _Intel® RealSense™ Tracking Camera T265_ provides odometry information that can be used for [VIO](../computer_vision/visual_inertial_odometry.md), augmenting or replacing other positioning systems on PX4.
+
+It is used in the [Visual Inertial Odometry (VIO) > Suggested Setup](../computer_vision/visual_inertial_odometry.md#suggested-setup).
+

## 购买渠道
-[Intel® RealSense™ Tracking Camera T265](https://www.intelrealsense.com/tracking-camera-t265/) (store.intelrealsense.com)
+No longer available.
## Setup Instructions
diff --git a/docs/zh/camera/fc_connected_camera.md b/docs/zh/camera/fc_connected_camera.md
index a97736fc8a3..00d02b5a154 100644
--- a/docs/zh/camera/fc_connected_camera.md
+++ b/docs/zh/camera/fc_connected_camera.md
@@ -113,12 +113,12 @@ If it is your first time enabling the camera trigger app, remember to reboot aft
The camera trigger driver supports several backends - each for a specific application, controlled by the [TRIG_INTERFACE](../advanced_config/parameter_reference.md#TRIG_INTERFACE) parameter:
-| Number | 描述 |
-| ------ | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
-| 1 | Enables the GPIO interface. The AUX outputs are pulsed high or low (depending on the `TRIG_POLARITY` parameter) every [TRIG_INTERVAL](../advanced_config/parameter_reference.md#TRIG_INTERVAL) duration. This can be used to trigger most standard machine vision cameras directly. Note that on PX4FMU series hardware (Pixhawk, Pixracer, etc.), the signal level on the AUX pins is 3.3v. |
-| 2 | Enables the Seagull MAP2 interface. This allows the use of the [Seagull MAP2](http://www.seagulluav.com/product/seagull-map2/) to interface to a multitude of supported cameras. Pin/Channel 1 (camera trigger) and Pin/Channel 2 (mode selector) of the MAP2 should be connected to the lower and higher mapped [camera trigger pins](#trigger-output-pin-configuration). Using Seagull MAP2, PX4 also supports automatic power control and keep-alive functionalities of Sony Multiport cameras like the QX-1. |
-| 3 | This mode enables MAVLink cameras that used the legacy [MAVLink interface listed above](#mavlink-command-interface). The messages are automatically emitted on the MAVLink `onboard` channel when found in missions. PX4 emits the `CAMERA_TRIGGER` MAVLink message when a camera is triggered, by default to the `onboard` channel (if this is not used, custom stream will need to be enabled). [Simple MAVLink cameras](../camera/mavlink_v1_camera.md) explains this use case in more detail. |
-| 4 | Enables the generic PWM interface. This allows the use of [infrared triggers](https://hobbyking.com/en_us/universal-remote-control-infrared-shutter-ir-rc-1g.html) or servos to trigger your camera. |
+| Number | 描述 |
+| ------ | ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
+| 1 | Enables the GPIO interface. The AUX outputs are pulsed high or low (depending on the `TRIG_POLARITY` parameter) every [TRIG_INTERVAL](../advanced_config/parameter_reference.md#TRIG_INTERVAL) duration. This can be used to trigger most standard machine vision cameras directly. Note that on PX4FMU series hardware (Pixhawk, Pixracer, etc.), the signal level on the AUX pins is 3.3v. |
+| 2 | Enables the Seagull MAP2 interface. This allows the use of the [Seagull MAP2](https://www.seagulluav.com/product/seagull-map2/) to interface to a multitude of supported cameras. Pin/Channel 1 (camera trigger) and Pin/Channel 2 (mode selector) of the MAP2 should be connected to the lower and higher mapped [camera trigger pins](#trigger-output-pin-configuration). Using Seagull MAP2, PX4 also supports automatic power control and keep-alive functionalities of Sony Multiport cameras like the QX-1. |
+| 3 | This mode enables MAVLink cameras that used the legacy [MAVLink interface listed above](#mavlink-command-interface). The messages are automatically emitted on the MAVLink `onboard` channel when found in missions. PX4 emits the `CAMERA_TRIGGER` MAVLink message when a camera is triggered, by default to the `onboard` channel (if this is not used, custom stream will need to be enabled). [Simple MAVLink cameras](../camera/mavlink_v1_camera.md) explains this use case in more detail. |
+| 4 | Enables the generic PWM interface. This allows the use of [infrared triggers](https://hobbyking.com/en_us/universal-remote-control-infrared-shutter-ir-rc-1g.html) or servos to trigger your camera. |
### Trigger Output Pin Configuration
diff --git a/docs/zh/camera/mavlink_v2_camera.md b/docs/zh/camera/mavlink_v2_camera.md
index f37e1b018de..5935a2d75cd 100644
--- a/docs/zh/camera/mavlink_v2_camera.md
+++ b/docs/zh/camera/mavlink_v2_camera.md
@@ -137,9 +137,9 @@ Generic/extensible camera managers:
- [MAVLink Camera Manager](https://github.com/mavlink/mavlink-camera-manager) - Extensible cross-platform MAVLink Camera Server built on top of GStreamer and Rust-MAVLink.
- [Dronecode Camera Manager](https://camera-manager.dronecode.org/en/) - Adds Camera Protocol interface for cameras connected to Linux computer.
-Camera-specfic camera managers:
+Camera-specific camera managers:
-- [SIYI A8 mini camera manager](https://github.com/julianoes/siyi-a8-mini-camera-manager) - MAVSDK-plugin based camera manager for the [SIYI A8 mini](https://shop.siyi.biz/products/siyi-a8-mini) (includes tutorial).
+- [SIYI A8 mini camera manager](https://github.com/julianoes/siyi-a8-mini-camera-manager) - MAVSDK-plugin based camera manager for the [SIYI A8 mini](https://shop.siyi.biz/products/siyi-a8-mini-gimbal-camera) (includes tutorial).
::: tip
This is a good example of how MAVSDK can be used to create a MAVLink camera protocol interface for a particular camera.
@@ -150,6 +150,6 @@ When using a camera manager you connect the companion computer to the flight con
More information about camera manager and companion computer setups can be found in:
-- [SIYI A8 mini camera manager](https://github.com/julianoes/siyi-a8-mini-camera-manager) - Tutorial for integrating with the [SIYI A8 mini](https://shop.siyi.biz/products/siyi-a8-mini) using a MAVSDK-based camera manager running on a Raspberry Pi companion computer.
+- [SIYI A8 mini camera manager](https://github.com/julianoes/siyi-a8-mini-camera-manager) - Tutorial for integrating with the [SIYI A8 mini](https://shop.siyi.biz/products/siyi-a8-mini-gimbal-camera) using a MAVSDK-based camera manager running on a Raspberry Pi companion computer.
- [Using a Companion Computer with Pixhawk Controllers](../companion_computer/pixhawk_companion.md)
- [Companion Computers > Companion Computer Software](../companion_computer/index.md#companion-computer-software): In particular note [MAVLink-Router](https://github.com/mavlink-router/mavlink-router), which you can setup to route MAVLink traffic between a serial port and an IP link (or other camera manager interface).
diff --git a/docs/zh/can/index.md b/docs/zh/can/index.md
index c1a6f32ec3a..1e3264327d4 100644
--- a/docs/zh/can/index.md
+++ b/docs/zh/can/index.md
@@ -38,7 +38,7 @@ CAN 网络的接线对于 DroneCAN 和 Cyphal/CAN 是一样 (实际上对所有
图中未显示任何电源接线。
参考制造商的说明,确认组件是否需要单独供电,还是可以通过 CAN 总线供电。
-欲了解更多信息,请查看[Cyphal/CAN设备互联](https://kb.zubax.com/pages/viewpage.action?pageId=2195476) (kb.zubax.com)。
+For more information, see [Cyphal/CAN device interconnection](https://wiki.zubax.com/public/cyphal/CyphalCAN-device-interconnection?pageId=2195476) (kb.zubax.com).
虽然本文是以 Cyphal 协议为基础编写的,但同样适用于 DroneCAN 硬件和任何其他 CAN 设置。
如需了解更复杂的场景,请参考 [论CAN总线拓扑结构与终端匹配](https://forum.opencyphal.org/t/on-can-bus-topology-and-termination/1685)。
diff --git a/docs/zh/companion_computer/auterion_skynode.md b/docs/zh/companion_computer/auterion_skynode.md
index 665ed28f1ee..bd27ac58977 100644
--- a/docs/zh/companion_computer/auterion_skynode.md
+++ b/docs/zh/companion_computer/auterion_skynode.md
@@ -1,6 +1,6 @@
-# Auterion Skynode
+# Auterion Skynode X
-[Skynode](https://auterion.com/product/skynode/) is a powerful flight computer that combines a mission computer, flight controller, video streaming, networking, and cellular connection, in a single tightly integrated device.
+[Skynode](https://auterion.com/product/skynode-x/) is a powerful flight computer that combines a mission computer, flight controller, video streaming, networking, and cellular connection, in a single tightly integrated device.

@@ -12,10 +12,11 @@ Auterion OS and Skynode allow seamless integration with Auterion's other softwar
For information about Auterion and Skynode:
- [auterion.com](https://auterion.com/)
-- [Skynode](https://auterion.com/product/skynode/) (auterion.com)
+- [Skynode X](https://auterion.com/product/skynode-x/) (auterion.com)
- Skynode Guides:
- - [Manufacturer's Guide](https://docs.auterion.com/manufacturers/getting-started/readme)
- - [App Developer's Guide](https://docs.auterion.com/developers/getting-started/readme)
+ - [Vehicle Operation](https://docs.auterion.com/vehicle-operation/auterion-sign-up)
+ - [App Development](https://docs.auterion.com/app-development/app-development)
+ - [Hardware Integration](https://docs.auterion.com/app-development/app-development)
## Skynode with Vanilla PX4
@@ -34,7 +35,7 @@ Upstream PX4 will generally work, with the following caveats:
PX4 `px4_fmu-v5x` binaries for Skynode are built from source using the normal [developer environment](../dev_setup/dev_env.md) and [build commands](../dev_setup/building_px4.md), and are uploaded using either `upload_skynode_usb` or `upload_skynode_wifi` upload targets.
-`upload_skynode_usb` and `upload_skynode_wifi` connect to Skynode via SSH over a network interface using the default (fixed) IP addresses for [USB](https://docs.auterion.com/manufacturers/avionics/skynode/advanced-configuration/connecting-to-skynode) and [WiFi](https://docs.auterion.com/manufacturers/avionics/skynode/advanced-configuration/configuration), and upload a TAR compressed binary to the mission computer.
+`upload_skynode_usb` and `upload_skynode_wifi` connect to Skynode via SSH over a network interface using the default (fixed) IP addresses for USB and WiFi, respectively (see [AuterionOS System Guide > Building and Flashing PX4 Firmware](https://docs.auterion.com/hardware-integration/auterionos-system-guide/flashing-px4-upstream-firmware)), and upload a TAR compressed binary to the mission computer.
The mission computer then decompresses the binary and installs it to the flight controller.
:::info
diff --git a/docs/zh/companion_computer/companion_computer_peripherals.md b/docs/zh/companion_computer/companion_computer_peripherals.md
index 52a12519d99..693221e4eed 100644
--- a/docs/zh/companion_computer/companion_computer_peripherals.md
+++ b/docs/zh/companion_computer/companion_computer_peripherals.md
@@ -30,7 +30,7 @@ A few "turnkey" options are listed below:
[mro_usb_ftdi_serial_to_jst_gh]: https://store.mrobotics.io/USB-FTDI-Serial-to-JST-GH-p/mro-ftdi-jstgh01-mr.htm
[sparkfun_ftdi basic_breakout]: https://www.sparkfun.com/products/9873
-You can also use an off-the-shelf FTDI cable [like this one](https://www.sparkfun.com/products/9717) and connect it to flight controller using the appropriate header adaptor
+You can also use an off-the-shelf FTDI cable [like this one](https://www.sparkfun.com/ftdi-cable-5v-vcc-3-3v-i-o.html) and connect it to flight controller using the appropriate header adaptor
(JST-GH connectors are specified in the Pixhawk standard, but you should confirm the connectors for your flight controller).
### Logic Level Shifters
@@ -40,7 +40,7 @@ In order to resolve this, a level shifter can be implemented to safely convert t
Options include:
-- [SparkFun Logic Level Converter - Bi-Directional](https://www.sparkfun.com/products/12009)
+- [SparkFun Logic Level Converter - Bi-Directional](https://www.sparkfun.com/sparkfun-logic-level-converter-bi-directional.html)
- [4-channel I2C-safe Bi-directional Logic Level Converter - BSS138](https://www.adafruit.com/product/757)
## Cameras
@@ -78,7 +78,7 @@ However NAT has no way to know where to direct the traffic from an arbitrary ext
:::
A common approach is to set up a virtual private network between the companion and GCS computer (i.e. install a VPN system like [zerotier](https://www.zerotier.com/) on both computers).
-The companion then uses [mavlink-router](https://github.com/intel/mavlink-router) to route traffic between the serial interface (flight controller) and GCS computer on the VPN network.
+The companion then uses [mavlink-router](https://github.com/mavlink-router/mavlink-router) to route traffic between the serial interface (flight controller) and GCS computer on the VPN network.
This method has the benefit that the GCS computer address can be static within the VPN, so the configuration of the _mavlink router_ does not need to change over time.
In addition, the communication link is secure because all VPN traffic is encrypted (MAVLink 2 itself does not support encryption).
@@ -90,5 +90,6 @@ This approach means that you do not need to know the IP address of the GCS compu
Some USB modules that are known to work include:
-- [Huawei E8372](https://consumer.huawei.com/en/mobile-broadband/e8372/) and [Huawei E3372](https://consumer.huawei.com/en/mobile-broadband/e3372/)
- - The _E8372_ includes WiFi which you can use to configure the SIM while it is plugged into the companion (making the development workflow a little easier). The _E3372_ lacks WiFi, so you have to configure it by plugging the stick into a laptop.
+- [Huawei E8372](https://consumer.huawei.com/au/support/routers/e8372/) and [Huawei E3372](https://consumer.huawei.com/au/support/routers/e3372/)
+ - The _E8372_ includes WiFi which you can use to configure the SIM while it is plugged into the companion (making the development workflow a little easier).
+ The _E3372_ lacks WiFi, so you have to configure it by plugging the stick into a laptop.
diff --git a/docs/zh/companion_computer/holybro_pixhawk_jetson_baseboard.md b/docs/zh/companion_computer/holybro_pixhawk_jetson_baseboard.md
index 18ff347bc06..38a48a563ff 100644
--- a/docs/zh/companion_computer/holybro_pixhawk_jetson_baseboard.md
+++ b/docs/zh/companion_computer/holybro_pixhawk_jetson_baseboard.md
@@ -4,7 +4,7 @@ The [Holybro Pixhawk Jetson Baseboard](https://holybro.com/products/pixhawk-jets

-The board comes with either the [Jetson Orin NX (16GB RAM)](https://holybro.com/products/nvidia-jetson-orin-nx-16g) or [Jetson Orin Nano (4GB RAM)](https://holybro.com/products/nvidia-jetson-orin-nx-16g?variant=44391410598077).
+The board comes with either the _Jetson Orin NX_ (16GB RAM) or _Jetson Orin Nano_ (4GB RAM) (see [NVIDIA Jetson Orin™](https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-orin/)).
It can be used with any Pixhawk Autopilot Bus (PAB) specification-compliant Pixhawk flight controller, such as the Pixhawk 6 or Pixhawk 6X.
This guide walks through the process of setting up the board and connecting to PX4, including:
@@ -44,7 +44,6 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
[Dimensions and weight](https://docs.holybro.com/autopilot/pixhawk-baseboards/pixhawk-jetson-baseboard/dimension-and-weight) (Holybro)
- 尺寸
-
- 126 x 80 x 45mm (with Jetson Orin NX + Heatsink/Fan & FC Module)
- 126 x 80 x 22.9mm (without Jetson and FC Module)
@@ -56,37 +55,30 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
:::tab Jetson connectors
- 2x Gigabit Ethernet Port
-
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- Ethernet Switch powered by the same circuit as the Pixhawk
- 8-pin JST-GH
- RJ45
- 2x MIPI CSI Camera Inputs
-
- 4 Lanes each
- 22-Pin Raspberry Pi Cam FFC
- 2x USB 3.0 Host Port
-
- USB A
- 5A Current Limit
- 2x USB 2.0 Host Port
-
- 5-Pin JST-GH
- 0A Current Limit
- USB 2.0 for Programming/Debugging
-
- USB-C
- 2 Key M 2242/2280 for NVMe SSD
-
- PCIEx4
- 2 Key E 2230 for WiFi/BT
-
- PCIEx2
- USB
- UART
@@ -95,27 +87,21 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
- Mini HDMI Out
- 4x GPIO
-
- 6-pin JST-GH
- CAN Port
-
- Connected to Autopilot's CAN2 (4 Pin JST-GH)
- SPI Port
-
- 7-Pin JST-GH
- I2C Port
-
- 4-Pin JST-GH
- I2S Port
-
- 7-Pin JST-GH
- 2x UART Port
-
- 1 for debug
- 1 connected to Autopilot's telem2
@@ -128,12 +114,10 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
:::tab Autopilot connectors
- Pixhawk Autopilot Bus Interface
-
- 100 Pin Hirose DF40
- 50 Pin Hirose DF40
- Redundant Digital Power Module Inputs
-
- I2C Power Monitor Support
- 2x 6-Pin Molex CLIK-Mate
@@ -142,66 +126,52 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
- Overvoltage Protection
- 额定电压
-
- Max input voltage: 6V
- USB 电源输入:4.75~5.25V
- Full GPS Plus Safety Switch Port
-
- 10-Pin JST-GH
- Secondary (GPS2) Port
-
- 6-Pin JST-GH
- 2x CAN Ports
-
- 4-Pin JST-GH
- 3x Telemetry Ports with Flow Control
-
- 2x 6-Pin JST-GH
- 1 is connected to Jetson's `UART1` Port
- 16 PWM Outputs
-
- 2x 10-Pin JST-GH
- UART4 & I2C Port
-
- 6-Pin JST-GH
- 2x Gigabit Ethernet Port
-
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- 8-Pin JST-GH
- RJ45
- AD & IO
-
- 8-Pin JST-GH
- USB 2.0
-
- USB-C
- 4-Pin JST-GH
- DSM Input
-
- 3-Pin JST-ZH 1.5mm Pitch
- RC In
-
- PPM/SBUS
- 5-Pin JST-GH
- SPI Port
-
- External Sensor Bus (SPI5)
- 11-Pin JST-GH
- 2x Debug Port
-
- 1 for FMU
- 1 for IO
- 10-Pin JST-SH
@@ -1333,7 +1303,7 @@ You can now start your ROS2 nodes and continue the development.
You can test the Client and agent by using the `sensor_combined` example in [Build ROS 2 Workspace](../ros2/user_guide.md#build-ros-2-workspace) (ROS2 User Guide).
:::tip
-[VSCode over SSH](https://code.visualstudio.com/learn/develop-cloud/ssh-lab-machines) enables faster development and application of changes to your ROS 2 code!
+[VSCode over SSH](https://code.visualstudio.com/docs/remote/ssh) enables faster development and application of changes to your ROS 2 code!
:::
After getting to the point of running the example:
diff --git a/docs/zh/companion_computer/index.md b/docs/zh/companion_computer/index.md
index dc726b740f7..97525770d5f 100644
--- a/docs/zh/companion_computer/index.md
+++ b/docs/zh/companion_computer/index.md
@@ -42,7 +42,7 @@ PX4 可以与计算机一起使用,可以配置为通过基于串口(或以太
- [NXP NavQPlus](https://nxp.gitbook.io/navqplus/user-contributed-content/ros2/microdds)
- [Nvidia Jetson TX2](https://developer.nvidia.com/embedded/jetson-tx2)
-* [Intel NUC](https://www.intel.com/content/www/us/en/products/details/nuc.html)
+* [Intel NUC](https://www.asus.com/au/content/nuc-overview/)
* [Gigabyte Brix](https://www.gigabyte.com/Mini-PcBarebone/BRIX)
小型/低功耗设备如:
@@ -78,7 +78,7 @@ MAVSDK 通常更容易学习和使用,而 ROS 提供更多预先编写的软
如果您需要将 MAVLink 从载具桥接到地面站或 IP 网络,您将需要一个路由器。 或者如果您需要多个连接:
-- [MAVLink Router](https://github.com/intel/mavlink-router) (recommended)
+- [MAVLink Router](https://github.com/mavlink-router/mavlink-router) (recommended)
- [MAVProxy](https://ardupilot.org/mavproxy/)
## 以太网设置
diff --git a/docs/zh/companion_computer/video_streaming_wfb_ng_wifi.md b/docs/zh/companion_computer/video_streaming_wfb_ng_wifi.md
index e72be7b9c4c..80227c2b6d3 100644
--- a/docs/zh/companion_computer/video_streaming_wfb_ng_wifi.md
+++ b/docs/zh/companion_computer/video_streaming_wfb_ng_wifi.md
@@ -20,7 +20,7 @@ The high level benefits of _WFB-ng_ include:
- Bidirectional telemetry link (MAVLink).
- TCP/IP tunnel.
- Automatic TX diversity - use multiple cards on the ground to avoid antenna tracker.
-- Full link encryption and authentication (using [libsodium](https://download.libsodium.org/doc/)).
+- Full link encryption and authentication (using [libsodium](https://doc.libsodium.org/)).
- Aggregation of MAVLink packets (pack small packets into batches before transmitting).
- Enhanced [OSD](https://github.com/svpcom/wfb-ng-osd) for Raspberry PI or generic linux desktop with gstreamer.
@@ -36,21 +36,19 @@ The vehicle setup consists of:
- A camera.
These have been tested:
-
- [Raspberry Pi camera](https://www.raspberrypi.org/products/camera-module-v2/) connected via CSI.
- - [Logitech camera C920](https://www.logitech.com/en-us/product/hd-pro-webcam-c920?crid=34) connected via USB
+ - [Logitech camera C920](https://support.logi.com/hc/en-us/articles/360024326953-Getting-started-HD-Pro-Webcam-C920) connected via USB
-- WiFi module [ALPHA AWUS036ACH](https://www.alfa.com.tw/products_detail/1.htm) or any other **RTL8812au** card.
+- WiFi module [ALPHA AWUS036ACH](https://www.alfa.com.tw/products/awus036ach_1?variant=40319795789896) or any other **RTL8812au** card.
### Ground Station
- Ground Station Computer.
These options have been tested:
-
- Any Linux computer with a USB port (tested on Ubuntu 18.04 x86-64)
- A computer with any OS running QGround control and Raspberry PI connected via Ethernet (RPi provides the wifi connection).
-- WiFi module [ALPHA AWUS036ACH](https://www.alfa.com.tw/products_detail/1.htm) or any other **RTL8812au** card.
+- WiFi module [ALPHA AWUS036ACH](https://www.alfa.com.tw/products/awus036ach_1?variant=40319795789896) or any other **RTL8812au** card.
See [WFB-ng wiki > WiFi hardware](https://github.com/svpcom/wfb-ng/wiki/WiFi-hardware) for more information on supported modules.
## Hardware Modification
@@ -125,7 +123,7 @@ If you need a higher bandwidth you can use other MCS index (for example 2 or gre
## Antennas and Diversity
-For simple cases you can use omnidirectional antennas with linear (that bundled with wifi cards) or circular leaf ([circularly polarized Coverleaf Antenna](http://www.antenna-theory.com/antennas/cloverleaf.php)) polarization.
+For simple cases you can use omnidirectional antennas with linear (that bundled with wifi cards) or circular leaf ([circularly polarized Coverleaf Antenna](https://www.antenna-theory.com/antennas/cloverleaf.php)) polarization.
If you want to setup long distance link you can use multiple wifi adapters with directional and omnidirectional antennas. TX/RX diversity for multiple adapters supported out of box (just add multiple NICs to `/etc/default/wifibroadcast`).
If your WiFi adapter has two antennas (like Alfa AWU036ACH) TX diversity is implemented via [STBC](https://en.wikipedia.org/wiki/Space%E2%80%93time_block_code).
Cards with 4 ports (like Alfa AWUS1900) are currently not supported.
diff --git a/docs/zh/complete_vehicles_fw/index.md b/docs/zh/complete_vehicles_fw/index.md
index a8e4b95fcbc..636dfd5ef63 100644
--- a/docs/zh/complete_vehicles_fw/index.md
+++ b/docs/zh/complete_vehicles_fw/index.md
@@ -12,7 +12,7 @@ You can find others on [px4.io](https://px4.io/ecosystem/commercial-systems/) an
This section contains consumer vehicles that run a _custom_ version of PX4 (supported by their vendors).
These may or may not be updatable to run "vanilla" PX4.
-- [Sentera PXH](https://sentera.com/products/fieldcapture/ag-drones/phx/)
+- [Sentera PXH](https://senterasensors.com/phx/)
:::warning
This flight controller has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
@@ -27,7 +27,6 @@ It is intended primarily for academic and commercial developers.
- 32 位 Arm® Cortex®-M3,24MHz,8KB SRAM
- 内置传感器:
-
- 加速度计/陀螺仪:ICM-20689
- 加速度计/陀螺仪:BMI055
- 磁力计:IST8310
@@ -147,5 +146,4 @@ The complete set of supported configurations can be seen in the [Airframes Refer
## 更多信息
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165).
-- [CUAV v5 docs](http://doc.cuav.net/flight-controller/v5-autopilot/en/v5.html)
- [CUAV Github](https://github.com/cuav)
diff --git a/docs/zh/flight_controller/cuav_v5_nano.md b/docs/zh/flight_controller/cuav_v5_nano.md
index dd4f7b25601..a42bc424974 100644
--- a/docs/zh/flight_controller/cuav_v5_nano.md
+++ b/docs/zh/flight_controller/cuav_v5_nano.md
@@ -17,7 +17,7 @@ The V5 nano is similar to the [CUAV V5+](../flight_controller/cuav_v5_plus.md),
Some of its main features include:
-- Full compatibility with the [Pixhawk project](https://pixhawk.org/) **FMUv5** design standard and uses the [Pixhawk Connector Standard](https://pixhawk.org/pixhawk-connector-standard/) for all external interfaces.
+- Full compatibility with the [Pixhawk project](https://pixhawk.org/) **FMUv5** design standard and uses the [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf) for all external interfaces.
- More advanced processor, RAM and flash memory than FMU v3, along with more stable and reliable sensors.
- Firmware-compatible with PX4.
- Generous 2.6mm spacing for I/O pins, making it easier to use all the interfaces.
@@ -31,7 +31,6 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
Main FMU Processor: STM32F765◦32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- 内置传感器:
-
- 加速度计 / 陀螺仪:ICM-20689
- 加速度计 / 陀螺仪:ICM-20602
- 加速度计 / 陀螺仪:BMI055
@@ -39,7 +38,6 @@ Main FMU Processor: STM32F765◦32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 51
- 气压计:MS5611
- Interfaces: 8 PWM outputs
-
- FMU上有3个专用PWM/Capture输入
- CPPM专用的RC输入
- Dedicated R/C input for Spektrum / DSM and S.Bus
@@ -186,7 +184,7 @@ CUAV adopts some differentiated designs and is incompatible with some hardware,
The _Neo v2.0 GPS_ that is recommended for use with _CUAV V5+_ and _CUAV V5 nano_ is not fully compatible with other Pixhawk flight controllers (specifically, the buzzer part is not compatible and there may be issues with the safety switch).
-The UAVCAN [NEO V2 PRO GNSS receiver](http://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html) can also be used, and is compatible with other flight controllers.
+The UAVCAN [NEO V2 PRO GNSS receiver](https://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html) can also be used, and is compatible with other flight controllers.
diff --git a/docs/zh/flight_controller/cuav_v5_plus.md b/docs/zh/flight_controller/cuav_v5_plus.md
index 3adffdbe116..464c4c19a38 100644
--- a/docs/zh/flight_controller/cuav_v5_plus.md
+++ b/docs/zh/flight_controller/cuav_v5_plus.md
@@ -14,7 +14,7 @@ The autopilot is recommended for commercial systems integration, but is also sui
Some of its main features include:
-- Full compatibility with the [Pixhawk project](https://pixhawk.org/) **FMUv5** design standard and uses the [Pixhawk Connector Standard](https://pixhawk.org/pixhawk-connector-standard/) for all external interfaces.
+- Full compatibility with the [Pixhawk project](https://pixhawk.org/) **FMUv5** design standard and uses the [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf) for all external interfaces.
- More advanced processor, RAM and flash memory than FMU v3, along with more stable and reliable sensors.
- Firmware-compatible with PX4.
- Modular design allows users to customize their own carrier board.
@@ -34,7 +34,6 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
- 32 位 Arm® Cortex®-M3,24MHz,8KB SRAM
- 内置传感器:
-
- 加速度计/陀螺仪:ICM-20689
- 加速度计/陀螺仪:BMI055
- 磁力计:IST8310
@@ -62,7 +61,6 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
- Dimensions: 85.5\*42\*33mm
- 其它特性:
-
- Operating temperature: -20 ~ 80°c(Measured value)
## 购买渠道
@@ -206,7 +204,7 @@ CUAV adopts some differentiated designs and is incompatible with some hardware,
The _Neo v2.0 GPS_ recommended for use with _CUAV V5+_ and _CUAV V5 nano_ is not fully compatible with other Pixhawk flight controllers (specifically, the buzzer part is not compatible and there may be issues with the safety switch).
-The UAVCAN [NEO V2 PRO GNSS receiver](http://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html) can also be used, and is compatible with other flight controllers.
+The UAVCAN [NEO V2 PRO GNSS receiver](https://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html) can also be used, and is compatible with other flight controllers.
@@ -240,7 +238,7 @@ Please do not connect other equipment (except RC receiver) on SBUS / DSM / RSSI
## 更多信息
- [CUAV V5+ Manual](http://manual.cuav.net/V5-Plus.pdf)
-- [CUAV V5+ docs](http://doc.cuav.net/flight-controller/v5-autopilot/en/v5+.html)
+- [CUAV V5+ docs](https://doc.cuav.net/controller/v5-autopilot/en/v5+.html)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165)
- [CUAV Github](https://github.com/cuav)
- [Base board design reference](https://github.com/cuav/hardware/tree/master/V5_Autopilot/V5%2B/V5%2BBASE)
diff --git a/docs/zh/flight_controller/cuav_x7.md b/docs/zh/flight_controller/cuav_x7.md
index a9f3e56566a..04f77686567 100644
--- a/docs/zh/flight_controller/cuav_x7.md
+++ b/docs/zh/flight_controller/cuav_x7.md
@@ -1,4 +1,11 @@
-# CUAV X7 飞行控制器
+# CUAV X7 Flight Controller (Discontinued)
+
+
+
+:::warning
+This flight controller has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
+It has been superseded by the [CUAV X7+](https://doc.cuav.net/controller/x7/en/).
+:::
:::warning
PX4 does not manufacture this (or any) autopilot.
@@ -41,7 +48,6 @@ They should be used by preference as they contain the most complete and up to da
- Main FMU Processor: STM32H743
- 内置传感器:
-
- 加速度计/陀螺仪:ICM-20689
- 加速度计/陀螺仪:ICM-20649
- Accelerometer/Gyroscope: BMI088
@@ -85,7 +91,7 @@ When it runs PX4 firmware, only 8 pwm works, the remaining 6 pwm are still being
## Connections (Wiring)
-[CUAV X7 Wiring Quickstart](http://doc.cuav.net/flight-controller/x7/en/quick-start/quick-start-x7.html)
+[CUAV X7 Wiring Quickstart](https://doc.cuav.net/controller/x7/en/quick-start/quick-start-x7-plus.html)
## Size and Pinouts
@@ -177,5 +183,5 @@ The complete set of supported configurations can be seen in the [Airframes Refer
## 更多信息
- [Quick start](http://doc.cuav.net/flight-controller/x7/en/quick-start/quick-start-x7.html)
-- [CUAV docs](http://doc.cuav.net)
+- [CUAV docs](https://doc.cuav.net/)
- [x7 schematic](https://github.com/cuav/hardware/tree/master/X7_Autopilot)
diff --git a/docs/zh/flight_controller/cubepilot_cube_orange.md b/docs/zh/flight_controller/cubepilot_cube_orange.md
index d42cac1ce0a..5af04e96a07 100644
--- a/docs/zh/flight_controller/cubepilot_cube_orange.md
+++ b/docs/zh/flight_controller/cubepilot_cube_orange.md
@@ -19,7 +19,7 @@ This is automatically configured and enabled in the default PX4 firmware.
Cube includes vibration isolation on two of the IMU's, with a third fixed IMU as a reference / backup.
:::tip
-The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview) contain detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview#differences-between-cube-colours).
+The manufacturer [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube) contains detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube/introduction/specifications).
:::
## 主要特性
@@ -53,7 +53,7 @@ The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/th
- 400 MHz
- 1 MB RAM
- 2 MB Flash \(fully accessible\)
-- **Failsafe co-processor:**
+- **Failsafe co-processor:**
- STM32F103 (32bit _ARM Cortex-M3_)
- 24 MHz
- 8 KB SRAM
@@ -244,6 +244,5 @@ Board schematics and other documentation can be found here: [The Cube Project](h
- [Cube Wiring Quickstart](../assembly/quick_start_cube.md)
- Cube Docs (Manufacturer):
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/zh/flight_controller/cubepilot_cube_orangeplus.md b/docs/zh/flight_controller/cubepilot_cube_orangeplus.md
index 7922e503a08..c117bea8aa8 100644
--- a/docs/zh/flight_controller/cubepilot_cube_orangeplus.md
+++ b/docs/zh/flight_controller/cubepilot_cube_orangeplus.md
@@ -20,7 +20,7 @@ This is automatically configured and enabled in the default PX4 firmware.
Cube includes vibration isolation on two of the IMU's, with a third fixed IMU as a reference / backup.
:::tip
-The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview) contain detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview#differences-between-cube-colours).
+The manufacturer [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube) contains detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube/introduction/specifications).
:::
## 主要特性
@@ -54,7 +54,7 @@ The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/th
- 400 MHz
- 1 MB RAM
- 2 MB Flash \(fully accessible\)
-- **Failsafe co-processor:**
+- **Failsafe co-processor:**
- STM32F103 (32bit _ARM Cortex-M3_)
- 24 MHz
- 8 KB SRAM
@@ -249,6 +249,5 @@ Board schematics and other documentation can be found here: [The Cube Project](h
- [Cube Wiring Quickstart](../assembly/quick_start_cube.md)
- Cube Docs (Manufacturer):
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/zh/flight_controller/cubepilot_cube_yellow.md b/docs/zh/flight_controller/cubepilot_cube_yellow.md
index 07720923b8f..cbdc9174330 100644
--- a/docs/zh/flight_controller/cubepilot_cube_yellow.md
+++ b/docs/zh/flight_controller/cubepilot_cube_yellow.md
@@ -15,7 +15,7 @@ For example, a carrier board for a commercial inspection vehicle might include c
Cube includes vibration isolation on two of the IMU's, with a third fixed IMU as a reference / backup.
:::tip
-The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview) contain detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview#differences-between-cube-colours).
+The manufacturer [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube) contains detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube/introduction/specifications).
:::
## 主要特性
@@ -49,7 +49,7 @@ The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/th
- 400 MHz
- 512 KB MB RAM
- 2 MB Flash
-- **Failsafe co-processor:**
+- **Failsafe co-processor:**
- STM32F100 (32bit _ARM Cortex-M3_)
- 24 MHz
- 8 KB SRAM
@@ -142,6 +142,5 @@ CAN1 and CAN2 silk screen on the Cube are flipped (CAN1 is CAN2 and vice versa).
- [Cube Wiring Quickstart](../assembly/quick_start_cube.md)
- Cube Docs (Manufacturer):
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/zh/flight_controller/durandal.md b/docs/zh/flight_controller/durandal.md
index f535818e90d..fd0b46cdb82 100644
--- a/docs/zh/flight_controller/durandal.md
+++ b/docs/zh/flight_controller/durandal.md
@@ -211,7 +211,7 @@ The complete set of supported configurations can be seen in the [Airframes Refer
## 针脚定义
_Durandal_ pinouts are listed below.
-These can also be downloaded from [here](https://holybro.com/collections/autopilot-flight-controllers/products/Durandal-Pinouts).
+These can also be downloaded from [here](https://cdn.shopifycdn.net/s/files/1/0604/5905/7341/files/Durandal_Pinouts_v1.0.pdf?v=1693983344).
### Top Pinouts
@@ -422,4 +422,4 @@ These can also be downloaded from [here](https://holybro.com/collections/autopil
- [Durandal Wiring QuickStart](../assembly/quick_start_durandal.md)
- [Durandal Technical Data Sheet](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Durandal_technical_data_sheet_90f8875d-8035-4632-a936-a0d178062077.pdf)
-- [Durandal Pinouts](https://holybro.com/collections/autopilot-flight-controllers/products/Durandal-Pinouts) (Holybro)
+- [Durandal Pinouts](https://cdn.shopifycdn.net/s/files/1/0604/5905/7341/files/Durandal_Pinouts_v1.0.pdf?v=1693983344) (Holybro)
diff --git a/docs/zh/flight_controller/holybro_pix32.md b/docs/zh/flight_controller/holybro_pix32.md
index b4debd551d1..f03a1b7d3f6 100644
--- a/docs/zh/flight_controller/holybro_pix32.md
+++ b/docs/zh/flight_controller/holybro_pix32.md
@@ -13,7 +13,7 @@ It runs the PX4 flight stack on the [NuttX](https://nuttx.apache.org/) OS.

-As a CC-BY-SA 3.0 licensed Open Hardware design, schematics and design files should be [available here](https://github.com/PX4/Hardware).
+As a CC-BY-SA 3.0 licensed Open Hardware design, schematics and design files should be [available here](https://github.com/pixhawk/Hardware).
:::tip
The Holybro pix32 is software compatible with the [3DR Pixhawk 1](../flight_controller/pixhawk.md).
@@ -26,7 +26,7 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
## 主要特性
-- Main System-on-Chip: [STM32F427](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU: 32-bit STM32F427 Cortex® M4 core with FPU
- RAM: 168 MHz/256 KB
- Flash: 2 MB
@@ -90,7 +90,7 @@ The board is based on the [Pixhawk project](https://pixhawk.org/) **FMUv2** open
- [FMUv2 + IOv2 schematic](https://raw.githubusercontent.com/PX4/Hardware/master/FMUv2/PX4FMUv2.4.5.pdf) -- Schematic and layout
:::info
-As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/PX4/Hardware).
+As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/pixhawk/Hardware).
:::
## 串口映射
diff --git a/docs/zh/flight_controller/kakutef7.md b/docs/zh/flight_controller/kakutef7.md
index 87f65b609b2..f011c397d69 100644
--- a/docs/zh/flight_controller/kakutef7.md
+++ b/docs/zh/flight_controller/kakutef7.md
@@ -74,7 +74,7 @@ This is the silkscreen for the _Kakute F7_, showing the top of the board:
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [kakutef7_bl.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/kakutef7/kakutef7_bl_0b3fbe2da0.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [kakutef7_bl.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/kakutef7/kakutef7_bl_0b3fbe2da0.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 编译固件
diff --git a/docs/zh/flight_controller/kakuteh7.md b/docs/zh/flight_controller/kakuteh7.md
index 16e4e8696b8..a48a3944908 100644
--- a/docs/zh/flight_controller/kakuteh7.md
+++ b/docs/zh/flight_controller/kakuteh7.md
@@ -78,7 +78,7 @@ This is the silkscreen for the _Kakute H7_, showing the top of the board:
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [kakuteh7_bl.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/kakuteh7/holybro_kakuteh7_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [kakuteh7_bl.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/kakuteh7/holybro_kakuteh7_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 编译固件
diff --git a/docs/zh/flight_controller/kakuteh7mini.md b/docs/zh/flight_controller/kakuteh7mini.md
index 1dc4ebc0301..5e3a7f29d5b 100644
--- a/docs/zh/flight_controller/kakuteh7mini.md
+++ b/docs/zh/flight_controller/kakuteh7mini.md
@@ -80,7 +80,7 @@ The board can be bought from one of the following shops (for example):
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before the PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [holybro_kakuteh7mini_bootloader.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/kakuteh7mini/holybro_kakuteh7mini_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [holybro_kakuteh7mini_bootloader.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/kakuteh7mini/holybro_kakuteh7mini_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 编译固件
diff --git a/docs/zh/flight_controller/kakuteh7v2.md b/docs/zh/flight_controller/kakuteh7v2.md
index 2f8dad629fa..7c0fa69c277 100644
--- a/docs/zh/flight_controller/kakuteh7v2.md
+++ b/docs/zh/flight_controller/kakuteh7v2.md
@@ -77,7 +77,7 @@ The _Kakute H7v2_ is designed to work with the _Tekko32_ 4-in-1 ESC and they can
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before the PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [holybro_kakuteh7v2_bootloader.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/kakuteh7v2/holybro_kakuteh7v2_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [holybro_kakuteh7v2_bootloader.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/kakuteh7v2/holybro_kakuteh7v2_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 编译固件
diff --git a/docs/zh/flight_controller/mro_pixhawk.md b/docs/zh/flight_controller/mro_pixhawk.md
index d4d92931c9d..7ff5c5cd9cd 100644
--- a/docs/zh/flight_controller/mro_pixhawk.md
+++ b/docs/zh/flight_controller/mro_pixhawk.md
@@ -47,7 +47,6 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
- External microUSB port
- 电源系统
-
- Ideal diode controller with automatic failover
- Servo rail high-power (7 V) and high-current ready
- All peripheral outputs over-current protected, all inputs ESD protected
@@ -102,8 +101,8 @@ See [3DR Pixhawk 1 > Pinouts](../flight_controller/pixhawk.md#pinouts)
The board is based on the [Pixhawk-project](https://pixhawk.org/) **FMUv3** open hardware design.
-- [FMUv3 schematic](https://github.com/PX4/Hardware/raw/master/FMUv3_REV_D/Schematic%20Print/Schematic%20Prints.PDF) -- Schematic and layout
+- [FMUv3 schematic](https://github.com/pixhawk/Hardware/raw/master/FMUv3_REV_D/Schematic%20Print/Schematic%20Prints.PDF) -- Schematic and layout
:::info
-As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/PX4/Hardware).
+As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/pixhawk/Hardware).
:::
diff --git a/docs/zh/flight_controller/mro_x2.1.md b/docs/zh/flight_controller/mro_x2.1.md
index ae1d15ce374..d54c36cd5ea 100644
--- a/docs/zh/flight_controller/mro_x2.1.md
+++ b/docs/zh/flight_controller/mro_x2.1.md
@@ -1,4 +1,10 @@
-# mRo-X2.1 Autopilot
+# mRo-X2.1 Autopilot (Discontinued)
+
+
+
+:::warning
+This flight controller has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
+:::
:::warning
PX4 does not manufacture this (or any) autopilot.
@@ -16,7 +22,7 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
## 总览
-- Main System-on-Chip: [STM32F427](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU: STM32F427VIT6 ARM® microcontroller - Revision 3
- IO: STM32F100C8T6 ARM® microcontroller
- 传感器:
@@ -29,8 +35,10 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
- 安装点:30.5mm x 30.5mm 直径 3.2mm
- 重量: 10.9g
-The diagram below provides a side-by-side comparison with a Pixhawk 1. The mRo features almost identical hardware and connectivity but
-has a much smaller footprint. Major differences are updated sensors and Rev 3 FMU.
+The diagram below provides a side-by-side comparison with a Pixhawk 1.
+The mRo features almost identical hardware and connectivity but
+has a much smaller footprint.
+Major differences are updated sensors and Rev 3 FMU.

@@ -63,13 +71,13 @@ has a much smaller footprint. Major differences are updated sensors and Rev 3 FM
By default a mRo X2.1 might come preconfigured for ArduPilot® rather than PX4. This
can be seen during firmware update when the board is recognized as FMUv2 instead of X2.1.
-In this case you must update the BootLoader using [BL_Update_X21.zip](https://github.com/PX4/PX4-user_guide/raw/main/assets/hardware/BL_Update_X21.zip).
+In this case you must update the BootLoader using [BL_Update_X21.zip](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/hardware/BL_Update_X21.zip).
If this correction is not carried out your compass direction will be wrong and the
secondary IMU will not be detected.
The update steps are:
-1. Download and extract [BL_Update_X21.zip](https://github.com/PX4/PX4-user_guide/raw/main/assets/hardware/BL_Update_X21.zip).
+1. Download and extract [BL_Update_X21.zip](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/hardware/BL_Update_X21.zip).
2. Find the folder _BL_Update_X21_. This contains a **bin** file and a subfolder named **/etc** containing an **rc.txt** file
3. Copy these files to your micro SD card's root directory and insert it into the mRO x2.1
4. Power on the mRO x2.1 Wait for it to boot and then reboot 1 time.
diff --git a/docs/zh/flight_controller/omnibus_f4_sd.md b/docs/zh/flight_controller/omnibus_f4_sd.md
index e0ffc12721e..97e3b26f799 100644
--- a/docs/zh/flight_controller/omnibus_f4_sd.md
+++ b/docs/zh/flight_controller/omnibus_f4_sd.md
@@ -192,9 +192,9 @@ If you use CRSF Telemetry you will need to build custom PX4 firmware.
By contrast, FrSky telemetry can use prebuilt firmware.
:::
-For Omnibus we recommend the [TBS Crossfire Nano RX](http://team-blacksheep.com/products/prod:crossfire_nano_rx), since it is specifically designed for small Quads.
+For Omnibus we recommend the [TBS Crossfire Nano RX](https://www.team-blacksheep.com/products/prod:crossfire_nano_rx), since it is specifically designed for small Quads.
-On the handheld controller (e.g. Taranis) you will also need a [Transmitter Module](http://team-blacksheep.com/shop/cat:rc_transmitters#product_listing).
+On the handheld controller (e.g. Taranis) you will also need a [Transmitter Module](https://www.team-blacksheep.com/shop/cat:tbs-crossfire-radio-transmitter#product_listing).
This can be plugged into the back of the RC controller.
:::info
@@ -218,17 +218,13 @@ Instructions for this are provided in the [TBS Crossfire Manual](https://www.tea
You will need to build custom firmware to use CRSF.
For more information see [CRSF Telemetry](../telemetry/crsf_telemetry.md#px4-configuration).
-## 原理图
+
-The schematics are provided by [Airbot](https://myairbot.com/): [OmnibusF4-Pro-Sch.pdf](http://bit.ly/obf4pro).
-
-
-
-## PX4 Bootloader Update
+## PX4 Bootloader Update {#bootloader}
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [omnibusf4sd_bl.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/omnibus_f4_sd/omnibusf4sd_bl_d52b70cb39.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [omnibusf4sd_bl.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/omnibus_f4_sd/omnibusf4sd_bl_d52b70cb39.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 编译固件
diff --git a/docs/zh/flight_controller/pixfalcon.md b/docs/zh/flight_controller/pixfalcon.md
index 8d83306ee0c..60e592f9f5c 100644
--- a/docs/zh/flight_controller/pixfalcon.md
+++ b/docs/zh/flight_controller/pixfalcon.md
@@ -17,7 +17,7 @@ The Pixfalcon autopilot (designed by [Holybro®](https://holybro.c
## 总览
-- Main System-on-Chip: [STM32F427](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU: 180 MHz ARM® Cortex® M4 with single-precision FPU
- RAM: 256 KB SRAM (L1)
- Failsafe System-on-Chip: STM32F100
diff --git a/docs/zh/flight_controller/pixhack_v3.md b/docs/zh/flight_controller/pixhack_v3.md
index d9d8320e237..e9f48ca3c5a 100644
--- a/docs/zh/flight_controller/pixhack_v3.md
+++ b/docs/zh/flight_controller/pixhack_v3.md
@@ -1,4 +1,10 @@
-# Pixhack v3
+# CUAV Pixhack V3 (Discontinued)
+
+
+
+:::warning
+This flight controller has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
+:::
:::warning
PX4 does not manufacture this (or any) autopilot.
@@ -53,7 +59,6 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
The board can be purchased from:
-- [store.cuav.net](http://store.cuav.net/index.php?id_product=8&id_product_attribute=0&rewrite=pixhack-v3-autopilot&controller=product&id_lang=3)
- [leixun.aliexpress.com/store](https://leixun.aliexpress.com/store)
## 编译固件
@@ -65,13 +70,11 @@ It is pre-built and automatically installed by _QGroundControl_ when appropriate
To [build PX4](../dev_setup/building_px4.md) for this target:
-```
+```sh
make px4_fmu-v3_default
```
-## 引脚和原理图
-
-- [Documentation/wiring guides](http://doc.cuav.net/flight-controller/pixhack/en/pixhack-v3.html)
+
## 串口映射
@@ -81,5 +84,5 @@ make px4_fmu-v3_default
| USART2 | /dev/ttyS1 | TELEM1 (flow control) |
| USART3 | /dev/ttyS2 | TELEM2 (flow control) |
| UART4 | | |
-| UART7 | CONSOLE | |
-| UART8 | SERIAL4 | |
+| UART7 | | CONSOLE |
+| UART8 | | SERIAL4 |
diff --git a/docs/zh/flight_controller/pixhawk-2.md b/docs/zh/flight_controller/pixhawk-2.md
index a5cea71f748..c92f721c6b4 100644
--- a/docs/zh/flight_controller/pixhawk-2.md
+++ b/docs/zh/flight_controller/pixhawk-2.md
@@ -11,7 +11,7 @@ We recommend however to consider products built on industry standards, such as t
This flight controller is not following the standard and uses a patented connector.
:::
-The [Hex Cube Black](http://www.proficnc.com/61-system-kits2) flight controller (previously known as Pixhawk 2.1) is a flexible autopilot intended primarily for manufacturers of commercial systems.
+The [Hex Cube Black](https://docs.cubepilot.org/user-guides/autopilot/the-cube) flight controller (previously known as Pixhawk 2.1) is a flexible autopilot intended primarily for manufacturers of commercial systems.
It is based on the [Pixhawk-project](https://pixhawk.org/) **FMUv3** open hardware design and runs PX4 on the [NuttX](https://nuttx.apache.org/) OS.

@@ -23,7 +23,7 @@ while a carrier board for a racer could includes ESCs form the frame of the vehi
Cube includes vibration isolation on two of the IMU's, with a third fixed IMU as a reference / Backup.
:::info
-The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview) contain detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview#differences-between-cube-colours).
+The manufacturer [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube) contains detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube/introduction/specifications).
:::
:::tip
@@ -32,7 +32,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
## 主要特性
-- 32bit STM32F427 [Cortex-M4F](http://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4)® core with FPU
+- 32bit STM32F427 [Cortex-M4F](https://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4)® core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 MB Flash \(fully accessible\)
@@ -51,7 +51,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
## 购买渠道
-[Cube Black](http://www.proficnc.com/61-system-kits) (ProfiCNC)
+[Cube Black](https://www.cubepilot.com/#/reseller/list) (Reseller list)
## 组装
@@ -61,7 +61,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
### 处理器
-- 32bit STM32F427 [Cortex M4](http://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4) core with FPU
+- 32bit STM32F427 [Cortex M4](https://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4) core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 MB Flash (fully accessible)
@@ -167,6 +167,5 @@ CAN1 and CAN2 silk screen on the Cube Black are flipped (CAN1 is CAN2 and vice v
- [Cube Wiring Quickstart](../assembly/quick_start_cube.md)
- Cube Docs (Manufacturer):
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/zh/flight_controller/pixhawk.md b/docs/zh/flight_controller/pixhawk.md
index a5922c1017d..1af2cdf4919 100644
--- a/docs/zh/flight_controller/pixhawk.md
+++ b/docs/zh/flight_controller/pixhawk.md
@@ -19,7 +19,7 @@ Assembly/setup instructions for use with PX4 are provided here: [Pixhawk Wiring
## 主要特性
-- Main System-on-Chip: [STM32F427](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU: 180 MHz ARM® Cortex® M4 with single-precision FPU
- RAM: 256 KB SRAM (L1)
- Failsafe System-on-Chip: STM32F100
@@ -60,7 +60,7 @@ Order mRo Pixhawk from:
### 处理器
-- 32bit STM32F427 [Cortex-M4F](http://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4) core with FPU
+- 32bit STM32F427 [Cortex-M4F](https://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4) core with FPU
- 168 MHz
- 256 KB RAM
- 2 MB Flash
@@ -119,7 +119,7 @@ Under these conditions the system will not draw any power (will not be operation
[FMUv2 + IOv2 schematic](https://raw.githubusercontent.com/PX4/Hardware/master/FMUv2/PX4FMUv2.4.5.pdf) -- Schematic and layout
:::info
-As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/PX4/Hardware).
+As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/pixhawk/Hardware).
:::
## Connections
@@ -263,22 +263,22 @@ Due to space constraints two ports are on one connector.
The [PX4 System Console](../debug/system_console.md) runs on the port labeled [SERIAL4/5](#serial-4-5-port).
:::tip
-A convenient way to connect to the console is to use a [Dronecode probe](https://kb.zubax.com/display/MAINKB/Dronecode+Probe+documentation), as it comes with connectors that can be used with several different Pixhawk devices.
-Simply connect the 6-pos DF13 1:1 cable on the [Dronecode probe](https://kb.zubax.com/display/MAINKB/Dronecode+Probe+documentation) to the Pixhawk `SERIAL4/5` port.
+A convenient way to connect to the console is to use a [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1), as it comes with connectors that can be used with several different Pixhawk devices.
+Simply connect the 6-pos DF13 1:1 cable on the [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1) to the Pixhawk `SERIAL4/5` port.
-
+
:::
The pinout is standard serial pinout, designed to connect to a [3.3V FTDI](https://www.digikey.com/en/products/detail/TTL-232R-3V3/768-1015-ND/1836393) cable (5V tolerant).
-| 3DR Pixhawk 1 | | FTDI | |
-| ------------- | ---------------------------- | ---- | -------------------------------- |
-| 1 | + 5v (红色) | | N/C |
-| 2 | S4 Tx | | N/C |
-| 3 | S4 Rx | | N/C |
-| 4 | S5 Tx | 5 | FTDI RX (黄色) |
-| 5 | S5 Rx | 4 | FTDI TX (橙色) |
-| 6 | GND | 1 | FTDI GND (黑色) |
+\| 3DR Pixhawk 1 | | FTDI |
+\| ------------- | --------- | ---- | ---------------- |
+\| 1 | +5V (red) | | N/C |
+\| 2 | S4 Tx | | N/C |
+\| 3 | S4 Rx | | N/C |
+\| 4 | S5 Tx | 5 | FTDI RX (yellow) |
+\| 5 | S5 Rx | 4 | FTDI TX (orange) |
+\| 6 | GND | 1 | FTDI GND (black) |
The wiring for an FTDI cable to a 6-pos DF13 1:1 connector is shown in the figure below.
@@ -323,11 +323,11 @@ make px4_fmu-v2_default
## Parts / Housings
-- **ARM MINI JTAG (J6)**: 1.27 mm 10pos header (SHROUDED), for Black Magic Probe: FCI 20021521-00010D4LF ([Distrelec](https://www.distrelec.ch/en/minitek-127-straight-male-pcb-header-surface-mount-rows-10-contacts-27mm-pitch-amphenol-fci-20021521-00010d4lf/p/14352308), [Digi-Key](https://www.digikey.com/en/products/detail/20021521-00010T1LF/609-4054-ND/2414951),) or Samtec FTSH-105-01-F-DV-K (untested) or Harwin M50-3600542 ([Digikey](https://www.digikey.com/en/products/detail/harwin-inc/M50-3600542/2264370) or [Mouser](http://ch.mouser.com/ProductDetail/Harwin/M50-3600542/?qs=%2fha2pyFadujTt%2fIEz8xdzrYzHAVUnbxh8Ki%252bwWYPNeEa09PYvTkIOQ%3d%3d))
+- **ARM MINI JTAG (J6)**: 1.27 mm 10pos header (SHROUDED), for Black Magic Probe: FCI 20021521-00010D4LF ([Distrelec](https://www.distrelec.ch/en/minitek-127-straight-male-pcb-header-surface-mount-rows-10-contacts-27mm-pitch-amphenol-fci-20021521-00010d4lf/p/14352308), [Digi-Key](https://www.digikey.com/en/products/detail/20021521-00010T1LF/609-4054-ND/2414951),) or Samtec FTSH-105-01-F-DV-K (untested) or Harwin M50-3600542 ([Digikey](https://www.digikey.com/en/products/detail/harwin-inc/M50-3600542/2264370))
- JTAG Adapter Option #1: [BlackMagic Probe](https://1bitsquared.com/products/black-magic-probe). Note, may come without cables (check with manufacturer).
- If so, you will need the **Samtec FFSD-05-D-06.00-01-N** cable ([Samtec sample service](https://www.samtec.com/products/ffsd-05-d-06.00-01-n) or [Digi-Key Link: SAM8218-ND](http://www.digikey.com/product-search/en?x=0&y=0&lang=en&site=us&KeyWords=FFSD-05-D-06.00-01-N)) or [Tag Connect Ribbon](http://www.tag-connect.com/CORTEXRIBBON10) and a Mini-USB cable.
- - JTAG Adapter Option #2: [Digi-Key Link: ST-LINK/V2](https://www.digikey.com/product-detail/en/stmicroelectronics/ST-LINK-V2/497-10484-ND) / [ST USER MANUAL](http://www.st.com/internet/com/TECHNICAL_RESOURCES/TECHNICAL_LITERATURE/USER_MANUAL/DM00026748.pdf), needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
- - JTAG Adapter Option #3: [SparkFun Link: Olimex ARM-TINY](http://www.sparkfun.com/products/8278) or any other OpenOCD-compatible ARM Cortex JTAG adapter, needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
+ If so, you will need the **Samtec FFSD-05-D-06.00-01-N** cable ([Samtec sample service](https://www.samtec.com/products/ffsd-05-d-06.00-01-n) or [Digi-Key Link: SAM8218-ND](https://www.digikey.com/en/products/detail/samtec-inc/ffsd-05-d-06-00-01-n/1106577)) or [Tag Connect Ribbon](https://www.tag-connect.com/product/10-pin-cortex-ribbon-cable-4-length-with-50-mil-connectors) and a Mini-USB cable.
+ - JTAG Adapter Option #2: [Digi-Key Link: ST-LINK/V2](https://www.digikey.com/product-detail/en/stmicroelectronics/ST-LINK-V2/497-10484-ND) / [ST USER MANUAL](https://www.st.com/resource/en/user_manual/dm00026748.pdf), needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
+ - JTAG Adapter Option #3: [Olimex ARM-TINY](https://www.olimex.com/wiki/ARM-USB-TINY) or any other OpenOCD-compatible ARM Cortex JTAG adapter, needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
- **USARTs**: Hirose DF13 6 pos ([Digi-Key Link: DF13A-6P-1.25H(20)](https://www.digikey.com/products/en?keywords=H3371-ND))
- Mates: Hirose DF13 6 pos housing ([Digi-Key Link: Hirose DF13-6S-1.25C](https://www.digikey.com/products/en?keywords=H2182-ND))
- **I2C and CAN**: Hirose DF13 4 pos ([Digi-Key Link: DF13A-4P-1.25H(20)](https://www.digikey.com/en/products/detail/hirose-electric-co-ltd/DF13A-4P-1-25H-20/530666) - discontinued)
diff --git a/docs/zh/flight_controller/pixhawk4.md b/docs/zh/flight_controller/pixhawk4.md
index 3dbca9b72fc..5930e4db489 100644
--- a/docs/zh/flight_controller/pixhawk4.md
+++ b/docs/zh/flight_controller/pixhawk4.md
@@ -49,7 +49,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
- 其它特性:
- 工作温度:-40 ~ 85°C
-Additional information can be found in the [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf).
+Additional information can be found in the [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/blob/main/docs/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf).
## 购买渠道
@@ -157,7 +157,7 @@ The complete set of supported configurations can be seen in the [Airframes Refer
## 更多信息
-- [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf)
+- [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165).
- [Pixhawk 4 Wiring QuickStart](../assembly/quick_start_pixhawk4.md)
- [Pixhawk 4 Pinouts](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Pixhawk4-Pinouts.pdf) (Holybro)
diff --git a/docs/zh/flight_controller/pixhawk4_mini.md b/docs/zh/flight_controller/pixhawk4_mini.md
index e2c3b9e34b4..f647ff41890 100644
--- a/docs/zh/flight_controller/pixhawk4_mini.md
+++ b/docs/zh/flight_controller/pixhawk4_mini.md
@@ -50,7 +50,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
- 其它特性:
- 工作温度:-40 ~ 85°C
-Additional information can be found in the [_Pixhawk 4 Mini_ Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_technical_data_sheet.pdf).
+Additional information can be found in the [_Pixhawk 4 Mini_ Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_technical_data_sheet.pdf).
## 购买渠道
@@ -66,7 +66,7 @@ The **RC IN** and **PPM** ports are for RC receivers only. These are powered! NE
## 针脚定义
-Download _Pixhawk 4 Mini_ pinouts from [here](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_pinouts.pdf).
+Download _Pixhawk 4 Mini_ pinouts from [here](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_pinouts.pdf).
## 尺寸
@@ -120,7 +120,8 @@ In order to access these ports, the user must remove the _Pixhawk 4 Mini_ casing

-The port has a standard serial pinout and can be connected to a standard FTDI cable (3.3V, but it's 5V tolerant) or a [Dronecode probe](https://kb.zubax.com/display/MAINKB/Dronecode+Probe+documentation). The pinout uses the standard [Pixhawk debug connector](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf) pinout. Please refer to the [wiring](../debug/system_console.md) page for details of how to wire up this port.
+The port has a standard serial pinout and can be connected to a standard FTDI cable (3.3V, but it's 5V tolerant) or a [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1).
+The pinout uses the standard [Pixhawk debug connector](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf) pinout. Please refer to the [wiring](../debug/system_console.md) page for details of how to wire up this port.
## 串口映射
@@ -153,5 +154,5 @@ It can be used for airframes that use AUX for non-essential peripherals (e.g. "f
## 更多信息
-- [_Pixhawk 4 Mini_ Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_technical_data_sheet.pdf)
+- [_Pixhawk 4 Mini_ Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_technical_data_sheet.pdf)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165).
diff --git a/docs/zh/flight_controller/pixhawk6c_mini.md b/docs/zh/flight_controller/pixhawk6c_mini.md
index 87a7d987609..a703d7c30b8 100644
--- a/docs/zh/flight_controller/pixhawk6c_mini.md
+++ b/docs/zh/flight_controller/pixhawk6c_mini.md
@@ -119,7 +119,7 @@ Please refer to the [Pixhawk 4 Mini Wiring Quick Start](../assembly/quick_start_
| UART7 | /dev/ttyS5 | TELEM1 | TELEM1 |
| UART8 | /dev/ttyS6 | GPS2 | GPS2 |
-
+
## 尺寸
diff --git a/docs/zh/flight_controller/pixhawk_mini.md b/docs/zh/flight_controller/pixhawk_mini.md
index 90afde9f7a7..48049ee7251 100644
--- a/docs/zh/flight_controller/pixhawk_mini.md
+++ b/docs/zh/flight_controller/pixhawk_mini.md
@@ -266,7 +266,7 @@ Pixhawk Mini supports many different radio receiver models:
 -- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/zh/flight_controller/pixhawk_series.md b/docs/zh/flight_controller/pixhawk_series.md
index 695ec601daa..6e983206326 100644
--- a/docs/zh/flight_controller/pixhawk_series.md
+++ b/docs/zh/flight_controller/pixhawk_series.md
@@ -41,7 +41,7 @@ The [Pixhawk project](https://pixhawk.org/) creates open hardware designs in the
Manufacturers are encouraged to take the [open designs](https://github.com/pixhawk/Hardware) and create products that are best suited to a particular market or use case (the physical layout/form factor not part of the open specification). Boards based on the same design are binary compatible.
:::info
-While a physical connector standard is not mandated, newer products generally follow the [Pixhawk Connector Standard](https://pixhawk.org/pixhawk-connector-standard/).
+While a physical connector standard is not mandated, newer products generally follow the [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf).
:::
The project also creates reference autopilot boards based on the open designs, and shares them under the same [licence](#licensing-and-trademarks).
diff --git a/docs/zh/flight_controller/pixracer.md b/docs/zh/flight_controller/pixracer.md
index 6a32b331030..bb021cfe62c 100644
--- a/docs/zh/flight_controller/pixracer.md
+++ b/docs/zh/flight_controller/pixracer.md
@@ -16,7 +16,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
## 主要特性
-- Main System-on-Chip: [STM32F427VIT6 rev.3](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427VIT6 rev.3](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU: 180 MHz ARM Cortex® M4 with single-precision FPU
- RAM: 256 KB SRAM (L1)
- Standard FPV form factor: 36x36 mm with standard 30.5 mm hole pattern
@@ -41,7 +41,8 @@ Accessories include:
## Kit
-The Pixracer is designed to use a separate avionics power supply. This is necessary to avoid current surges from motors or ESCs to flow back to the flight controller and disturb its delicate sensors.
+The Pixracer is designed to use a separate avionics power supply.
+This is necessary to avoid current surges from motors or ESCs to flow back to the flight controller and disturb its delicate sensors.
- Power module (with voltage and current sensing)
- I2C splitter (supporting AUAV, Hobbyking and 3DR® peripherals)
@@ -53,7 +54,7 @@ One of the main features of the board is its ability to use Wifi for flashing ne
This frees it of the need of any desktop system.
- [ESP8266 Wifi](../telemetry/esp8266_wifi_module.md)
-- [Custom ESP8266 MAVLink firmware](https://github.com/dogmaphobic/mavesp8266)
+- [Custom ESP8266 MAVLink firmware](https://github.com/BeyondRobotix/mavesp8266)
:::info
Firmware upgrade is not yet enabled over WiFi (it is supported by the default bootloader but not yet enabled).
@@ -85,7 +86,7 @@ For more information see: [Pixracer Wiring Quickstart > External Telemetry](../a
## 连接器
-All connectors follow the [Pixhawk connector standard](https://pixhawk.org/pixhawk-connector-standard/).
+All connectors follow the [Pixhawk connector standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf).
Unless noted otherwise all connectors are JST GH.
## 针脚定义
@@ -204,8 +205,8 @@ The reference is provided as: [Altium Design Files](https://github.com/AUAV-Open
The following PDF files are provided for _convenience only_:
-- [pixracer-rc12-12-06-2015-1330.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixracer/pixracer-rc12-12-06-2015-1330.pdf)
-- [pixracer-r14.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixracer/pixracer-r14.pdf) - R14 or RC14 is printed next to the SDCard socket
+- [pixracer-rc12-12-06-2015-1330.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixracer/pixracer-rc12-12-06-2015-1330.pdf)
+- [pixracer-r14.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixracer/pixracer-r14.pdf) - R14 or RC14 is printed next to the SDCard socket
## 编译固件
diff --git a/docs/zh/flight_controller/raccoonlab_fmu6x.md b/docs/zh/flight_controller/raccoonlab_fmu6x.md
index ee5920c8dce..97329e68c59 100644
--- a/docs/zh/flight_controller/raccoonlab_fmu6x.md
+++ b/docs/zh/flight_controller/raccoonlab_fmu6x.md
@@ -159,4 +159,4 @@ The complete set of supported configurations can be seen in the [Airframes Refer
- [Pixhawk Autopilot FMUv6X Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-012%20Pixhawk%20Autopilot%20v6X%20Standard.pdf)
- [Pixhawk Autopilot Bus Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-010%20Pixhawk%20Autopilot%20Bus%20Standard.pdf)
- [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf)
-- [RaccoonLab docs](http://docs.raccoonlab.co)
+- [RaccoonLab docs](https://docs.raccoonlab.co/)
diff --git a/docs/zh/flight_controller/thepeach_k1.md b/docs/zh/flight_controller/thepeach_k1.md
index 2fe715a61c4..8f831afabaf 100644
--- a/docs/zh/flight_controller/thepeach_k1.md
+++ b/docs/zh/flight_controller/thepeach_k1.md
@@ -14,21 +14,17 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
## 产品规格
- Main Processor: STM32F427VIT6
-
- 32bit ARM Cortex-M4, 168 MHz 256 KB RAM 2 MB Flash memory
- IO Processor: STM32F100C8T6
-
- ARM Cortex-M3, 32bit ARM Cortex-M3, 24 MHz, 8KB SRAM
- On-board sensors
-
- 加速度计 / 陀螺仪:ICM-20602
- Accel/Gyro/Mag: MPU-9250
- 气压计:MS5611
- 接口
-
- 8+5 PWM output (8 from IO, 5 from FMU)
- Spektrum DSM / DSM2 / DSM-X Satellite compatible input
- Futaba S.BUS compatible input and output
@@ -98,4 +94,4 @@ make thepeach_k1_default
## Where to buy
-Order from [ThePeach](http://thepeach.shop/)
+Order from [ThePeach](https://thepeach.shop/)
diff --git a/docs/zh/flight_controller/thepeach_r1.md b/docs/zh/flight_controller/thepeach_r1.md
index 5fec6a5de80..1be40738ba2 100644
--- a/docs/zh/flight_controller/thepeach_r1.md
+++ b/docs/zh/flight_controller/thepeach_r1.md
@@ -14,21 +14,17 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
## 产品规格
- Main Processor: STM32F427VIT6
-
- 32bit ARM Cortex-M4, 168 MHz 256 KB RAM 2 MB Flash memory
- IO Processor: STM32F100C8T6
-
- ARM Cortex-M3, 32bit ARM Cortex-M3, 24 MHz, 8KB SRAM
- On-board sensors
-
- 加速度计 / 陀螺仪:ICM-20602
- Accel/Gyro/Mag: MPU-9250
- 气压计:MS5611
- 接口
-
- 8+6 PWM output (8 from IO, 6 from FMU)
- Spektrum DSM / DSM2 / DSM-X Satellite compatible input
- Futaba S.BUS compatible input and output
@@ -42,7 +38,6 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
- Analog inputs for voltage / Current of 1 battery
- Interfaces For Raspberry Pi CM3+
-
- VBUS
- DDR2 Connector: Raspberry Pi CM3+
- 1x UART
@@ -103,4 +98,4 @@ make thepeach_r1_default
## Where to buy
-Order from [ThePeach](http://thepeach.shop/)
+Order from [ThePeach](https://thepeach.shop/)
diff --git a/docs/zh/flight_modes/offboard.md b/docs/zh/flight_modes/offboard.md
index 0d556ca4570..bf14082e859 100644
--- a/docs/zh/flight_modes/offboard.md
+++ b/docs/zh/flight_modes/offboard.md
@@ -85,9 +85,7 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### 旋翼机
- [px4_msgs::msg::TrajectorySetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/TrajectorySetpoint.msg)
-
- 支持以下输入组合:
-
- Position setpoint (`position` different from `NaN`). Non-`NaN` values of velocity and acceleration are used as feedforward terms for the inner loop controllers.
- Velocity setpoint (`velocity` different from `NaN` and `position` set to `NaN`). Non-`NaN` values acceleration are used as feedforward terms for the inner loop controllers.
- Acceleration setpoint (`acceleration` different from `NaN` and `position` and `velocity` set to `NaN`)
@@ -95,18 +93,14 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- 所有值都是基于NED(北, 东, 地)坐标系,位置、速度和加速的单位分别为\[m\], \[m/s\] 和\[m/s^2\] 。
- [px4_msgs::msg::VehicleAttitudeSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleAttitudeSetpoint.msg)
-
- 支持以下输入组合:
-
- quaternion `q_d` + thrust setpoint `thrust_body`.
Non-`NaN` values of `yaw_sp_move_rate` are used as feedforward terms expressed in Earth frame and in \[rad/s\].
- 姿态四元数表示无人机机体坐标系FRD(前、右、下) 与NED坐标系之间的旋转。 这个推力是在无人机体轴FRD坐标系下,并归一化为 \[-1, 1\] 。
- [px4_msgs::msg::VehicleRatesSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleRatesSetpoint.msg)
-
- 支持以下输入组合:
-
- `roll`, `pitch`, `yaw` and `thrust_body`.
- 所有值都表示在无人机体轴FRD坐标系下。 角速率(roll, pitch, yaw) 单位为\[rad/s\] ,thrust_body归一化为 \[-1, 1\]。
@@ -116,7 +110,6 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
下面的offboard控制模式会绕过所有PX4内部的控制环,应当非常谨慎地使用。
- [px4_msgs::msg::VehicleThrustSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleThrustSetpoint.msg) + [px4_msgs::msg::VehicleTorqueSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleTorqueSetpoint.msg)
-
- 支持以下输入组合:
- `xyz` for thrust and `xyz` for torque.
- 所有值都在无人机体轴 FRD 坐标系中表示,并且归一化为\[-1, 1\]。
@@ -134,9 +127,7 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### 直升机/垂直起降
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported:
-
- Position setpoint (only `x`, `y`, `z`)
- Velocity setpoint (only `vx`, `vy`, `vz`)
- Acceleration setpoint (only `afx`, `afy`, `afz`)
@@ -146,9 +137,7 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- PX4 supports the following `coordinate_frame` values (only): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported:
-
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
- Velocity setpoint (only `vx`, `vy`, `vz`)
@@ -172,11 +161,8 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### Fixed-wing
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported (via `type_mask`):
-
- Position setpoint (`x`, `y`, `z` only; velocity and acceleration setpoints are ignored).
-
- Specify the _type_ of the setpoint in `type_mask` (if these bits are not set the vehicle will fly in a flower-like pattern):
::: info
Some of the _setpoint type_ values below are not part of the MAVLink standard for the `type_mask` field.
@@ -196,11 +182,8 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- PX4 supports the coordinate frames (`coordinate_frame` field): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported (via `type_mask`):
-
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
-
- Specify the _type_ of the setpoint in `type_mask` (if these bits are not set the vehicle will fly in a flower-like pattern):
::: info
@@ -225,11 +208,8 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### 无人车
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported (in `type_mask`):
-
- Position setpoint (only `x`, `y`, `z`)
-
- Specify the _type_ of the setpoint in `type_mask`:
::: info
@@ -245,13 +225,11 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- PX4 supports the coordinate frames (`coordinate_frame` field): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported (in `type_mask`):
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
- Specify the _type_ of the setpoint in `type_mask` (not part of the MAVLink standard).
值为:
-
- 下面的比特位没有置位,是正常表现。
- 12288:悬停设定值(无人机足够接近设定值时会停止)。
@@ -279,7 +257,7 @@ _Offboard mode_ is affected by the following parameters:
## 开发者资源
-Typically developers do not directly work at the MAVLink layer, but instead use a robotics API like [MAVSDK](https://mavsdk.mavlink.io/) or [ROS](http://www.ros.org/) (these provide a developer friendly API, and take care of managing and maintaining connections, sending messages and monitoring responses - the minutiae of working with _Offboard mode_ and MAVLink).
+Typically developers do not directly work at the MAVLink layer, but instead use a robotics API like [MAVSDK](https://mavsdk.mavlink.io/) or [ROS](https://www.ros.org/) (these provide a developer friendly API, and take care of managing and maintaining connections, sending messages and monitoring responses - the minutiae of working with _Offboard mode_ and MAVLink).
以下资源可能对开发者有用:
diff --git a/docs/zh/frames_multicopter/dji_f450_cuav_5nano.md b/docs/zh/frames_multicopter/dji_f450_cuav_5nano.md
index 3d483c3527e..bc5a5d5837c 100644
--- a/docs/zh/frames_multicopter/dji_f450_cuav_5nano.md
+++ b/docs/zh/frames_multicopter/dji_f450_cuav_5nano.md
@@ -163,7 +163,7 @@ The final build is shown below:
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/zh/frames_multicopter/dji_f450_cuav_5plus.md b/docs/zh/frames_multicopter/dji_f450_cuav_5plus.md
index 2432987794d..8f2057d2ce0 100644
--- a/docs/zh/frames_multicopter/dji_f450_cuav_5plus.md
+++ b/docs/zh/frames_multicopter/dji_f450_cuav_5plus.md
@@ -166,7 +166,7 @@ The final build is shown below:
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/)
+[Download and install](https://qgroundcontrol.com/downloads/)
_QGroundControl_ for your platform.
:::tip
diff --git a/docs/zh/frames_multicopter/holybro_qav250_pixhawk4_mini.md b/docs/zh/frames_multicopter/holybro_qav250_pixhawk4_mini.md
index 4b8b96e2b3c..63b45528e5e 100644
--- a/docs/zh/frames_multicopter/holybro_qav250_pixhawk4_mini.md
+++ b/docs/zh/frames_multicopter/holybro_qav250_pixhawk4_mini.md
@@ -21,7 +21,7 @@ Key information
## Quickstart Guide
-[Pixhawk 4 Mini QAV250 Kit Quickstart Guide](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_qav250kit_quickstart_web.pdf)
+[Pixhawk 4 Mini QAV250 Kit Quickstart Guide](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_qav250kit_quickstart_web.pdf)
## Bill of materials
@@ -40,7 +40,7 @@ Additionally you will need a battery and receiver (+compatible transmitter).
This build uses:
- Receiver: [FrSSKY D4R-II](https://www.frsky-rc.com/product/d4r-ii/)
-- Battery: [4S 1300 mAh](http://www.getfpv.com/lumenier-1300mah-4s-60c-lipo-battery-xt60.html)
+- Battery: [4S 1300 mAh](https://www.getfpv.com/lumenier-1300mah-4s-60c-lipo-battery-xt60.html)
## 硬件
@@ -104,26 +104,37 @@ The following tools are used in this assembly:
1. Attach arms to the button plate with the 15mm screws as shown:

+
2. Put the short plate over the arms

+
3. Put the nuts on the 15mm screws (shown next step)
+
4. Insert the plastic screws into the indicated holes (note that this part of the frame faces down when the vehicle is complete).

+
5. Add the plastic nuts to the screws (turn over, as shown)

+
6. Lower the power module over the plastic screws and then add the plastics standoffs

+
7. Put the flight controller plate on the standoffs (over the power module)

+
8. Attach the motors. The motors have an arrow indicating the direction of rotation.

+
9. Use double sided tape from kit to attach the _Pixhawk 4 Mini_ to the flight controller plate.

+
10. Connect the power module's "power" cable to _Pixhawk 4 mini_.

+
11. Attach the aluminium standoffs to the button plate

+
12. Connect the Esc’s with the motors and hold. In this image shown the order of the motors and direction of the rotation.

@@ -135,19 +146,24 @@ The following tools are used in this assembly:
:::

+
13. Connect the signal ESC cables to the PWM outputs of the Pixhawk in the correct order (see previous image)

+
14. Connect the receiver.
- If using a PPM receiver connect to the PPM port.

+
- If using the SBUS receiver connect to the RC IN port

+
15. Connect the telemetry module. Paste the module with double tape and connect on the port of the telemetry.

+
16. Connect the GPS module

@@ -155,6 +171,7 @@ The following tools are used in this assembly:
Attach the module on the top plate (using provided 3M tape, or paste). Then put the top plate on the standoffs as shown

+
17. The last "mandatory" assembly step is to add the velcro to hold the battery

@@ -193,7 +210,7 @@ If you have to wire the system yourself, the diagram below shows all the connect
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the QAV250 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/zh/frames_multicopter/holybro_s500_v2_pixhawk4.md b/docs/zh/frames_multicopter/holybro_s500_v2_pixhawk4.md
index e0ef688fa48..80805b55930 100644
--- a/docs/zh/frames_multicopter/holybro_s500_v2_pixhawk4.md
+++ b/docs/zh/frames_multicopter/holybro_s500_v2_pixhawk4.md
@@ -268,7 +268,7 @@ Fully assembled, the kit looks as shown below:
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the QAV250 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/zh/frames_multicopter/holybro_x500V2_pixhawk5x.md b/docs/zh/frames_multicopter/holybro_x500V2_pixhawk5x.md
index 96dff21edd9..c55548083b7 100644
--- a/docs/zh/frames_multicopter/holybro_x500V2_pixhawk5x.md
+++ b/docs/zh/frames_multicopter/holybro_x500V2_pixhawk5x.md
@@ -196,7 +196,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/zh/frames_multicopter/holybro_x500_pixhawk4.md b/docs/zh/frames_multicopter/holybro_x500_pixhawk4.md
index 1c044b52d38..5306462cd4a 100644
--- a/docs/zh/frames_multicopter/holybro_x500_pixhawk4.md
+++ b/docs/zh/frames_multicopter/holybro_x500_pixhawk4.md
@@ -215,7 +215,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/zh/frames_multicopter/holybro_x500v2_pixhawk6c.md b/docs/zh/frames_multicopter/holybro_x500v2_pixhawk6c.md
index 4f7b61cebcf..83bd090fc6f 100644
--- a/docs/zh/frames_multicopter/holybro_x500v2_pixhawk6c.md
+++ b/docs/zh/frames_multicopter/holybro_x500v2_pixhawk6c.md
@@ -15,7 +15,7 @@ This topic provides full instructions for building the [Holybro X500 V2 ARF Kit]
### Payload and Battery Holder
-**Screw**- Sunk Screw M2.5\*6 12pcs
+**Screw**- Sunk Screw M2.5\*6 12pcs
1. Insert the hanger rubber ring gasket in each of their respective hangers.
Do not use sharp objects to press the rubbers inside.
@@ -135,6 +135,7 @@ The following parts can be placed as per usual.
[](https://youtu.be/aiFxVJFjlos)
This guide uses the GPS mount location suggested in Holybro’s guide.
+
2. Screw the GPS mount’s bottom end on the payload holder side using Locknut M3 & Screw M3\*10
[](https://youtu.be/uG5UKy3FrIc)
@@ -170,7 +171,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/zh/frames_multicopter/omnicopter.md b/docs/zh/frames_multicopter/omnicopter.md
index b92c2eaa629..7d12e1a14c4 100644
--- a/docs/zh/frames_multicopter/omnicopter.md
+++ b/docs/zh/frames_multicopter/omnicopter.md
@@ -41,7 +41,7 @@ The components needed for this build are:
- rods: 12x328mm, 6x465mm
- Screws:
- Motors and standoffs: 40x M3x12mm
- - FC mount: 4x M3x35mm, 4x M3 nuts
+ - FC mount: 4x M3x35mm, 4x M3 nuts
- Standoffs: 4x 40mm
- [3D model](https://cad.onshape.com/documents/eaff30985f1298dc6ce8ce13/w/2f662e604240c4082682e5e3/e/ad2b2245b73393cf369132f7)
@@ -57,10 +57,13 @@ The components needed for this build are:
You will notice if it's wrong when the angles of the rods are not correct.
:::
+
- Cut the rods
+
- Test that it all works by connecting the frame pieces together:

+
- Place the motors as far out as possible, without the propellers touching the rods.
### Electronics
@@ -117,7 +120,7 @@ Make sure the motors do not overheat with the changed settings.
- Parameters:
- Change the desaturation logic for better attitude tracking: set [CA_METHOD](../advanced_config/parameter_reference.md#CA_METHOD) to 0.
- Disable failure detection: set [FD_FAIL_P](../advanced_config/parameter_reference.md#FD_FAIL_P) and [FD_FAIL_R](../advanced_config/parameter_reference.md#FD_FAIL_R) to 0.
-- [This file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/multicopter/omnicopter/omnicopter.params) contains all the relevant parameters.
+- [This file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/multicopter/omnicopter/omnicopter.params) contains all the relevant parameters.
## 视频
diff --git a/docs/zh/frames_multicopter/qav_r_5_kiss_esc_racer.md b/docs/zh/frames_multicopter/qav_r_5_kiss_esc_racer.md
index c94a48d5ce7..b7587e0b557 100644
--- a/docs/zh/frames_multicopter/qav_r_5_kiss_esc_racer.md
+++ b/docs/zh/frames_multicopter/qav_r_5_kiss_esc_racer.md
@@ -6,7 +6,7 @@ It also provides information on the (optional) FPV setup.
Key information:
-- **Frame:** [Lumenier QAV-R 5"](http://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
+- **Frame:** [Lumenier QAV-R 5"](https://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
- **Flight controller:** [Pixracer](../flight_controller/pixracer.md)
@@ -18,24 +18,24 @@ Key information:
### Vehicle (needed for flying)
-- Autopilot: [Pixracer](../flight_controller/pixracer.md) from [AUAV](https://store.mrobotics.io/mRo-PixRacer-R14-Official-p/auav-pxrcr-r14-mr.htm) including ESP8266 WiFi- and [ACSP5](https://store.mrobotics.io/product-p/auav-acsp5-mr.htm) power-module
-- Frame: [Lumenier QAV-R 5"](http://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
-- Motors: [Lumenier RX2206-11 2350KV](http://www.getfpv.com/lumenier-rx2206-11-2350kv-motor.html)
-- ESCs: [KISS 24A Race Edition](http://www.getfpv.com/kiss-24a-esc-race-edition-32bit-brushless-motor-ctrl.html)
-- Props: HQProp 5x4.5x3 [CW](http://www.getfpv.com/hqprop-5x4-5x3rg-cw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html) [CCW](http://www.getfpv.com/hqprop-5x4-5x3g-ccw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html)
+- Autopilot: [Pixracer](../flight_controller/pixracer.md) from [AUAV](https://store.mrobotics.io/mRo-PixRacer-R14-Official-p/auav-pxrcr-r14-mr.htm) including ESP8266 WiFi- and [ACSP5](https://store.mrobotics.io/product-p/auav-acsp5-mr.htm) power-module
+- Frame: [Lumenier QAV-R 5"](https://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
+- Motors: [Lumenier RX2206-11 2350KV](https://www.getfpv.com/lumenier-rx2206-11-2350kv-motor.html)
+- ESCs: [KISS 24A Race Edition](https://www.getfpv.com/kiss-24a-esc-race-edition-32bit-brushless-motor-ctrl.html)
+- Props: HQProp 5x4.5x3 [CW](https://www.getfpv.com/hqprop-5x4-5x3rg-cw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html) [CCW](https://www.getfpv.com/hqprop-5x4-5x3g-ccw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html)
- GPS / Ext. Mag.: M8N taken from a [Pixhawk Mini (Discontinued)](../flight_controller/pixhawk_mini.md) set and rewired
-- Battery: [TATTU 1800mAh 4s 75c Lipo](http://www.getfpv.com/tattu-1800mah-4s-75c-lipo-battery.html)
-- RC Receiver: [FrSky X4R-SB](http://www.getfpv.com/frsky-x4r-sb-3-16-channel-receiver-w-sbus.html)
-- RC Transmitter: [FrSky Taranis](http://www.getfpv.com/frsky-taranis-x9d-plus-2-4ghz-accst-radio-w-soft-case-mode-2.html)
-- FC dampening: [O-Rings](http://www.getfpv.com/multipurpose-o-ring-set-of-8.html)
-- GPS Mount: [GPS mast](http://www.getfpv.com/folding-aluminum-gps-mast-for-dji.html)
+- Battery: [TATTU 1800mAh 4s 75c Lipo](https://www.getfpv.com/tattu-1800mah-4s-75c-lipo-battery.html)
+- RC Receiver: [FrSky X4R-SB](https://www.getfpv.com/frsky-x4r-sb-3-16-channel-receiver-w-sbus.html)
+- RC Transmitter: [FrSky Taranis](https://www.getfpv.com/frsky-taranis-x9d-plus-2-4ghz-accst-radio-w-soft-case-mode-2.html)
+- FC dampening: [O-Rings](https://www.getfpv.com/multipurpose-o-ring-set-of-8.html)
+- GPS Mount: [GPS mast](https://www.getfpv.com/folding-aluminum-gps-mast-for-dji.html)
### FPV (optional)
- Camera: [RunCam Swift RR Edition](https://www.getfpv.com/runcam-swift-rotor-riot-special-edition-ir-block-black.html) **includes must-have high quality wide angle lens from GoPro!**
- Video Tx: [ImmersionRC Tramp HV 5.8GHz 600mW](https://www.getfpv.com/immersionrc-tramp-hv-5-8ghz-video-tx-us-version.html) (Discontinued).
-- Video Antennas: [TBS Triumph 5.8GHz CP](http://www.getfpv.com/fpv/antennas/tbs-triumph-5-8ghz-cp-fpv-antenna-3275.html) (SMA port fits ImmercionRC Tx)
-- FPV voltage source plug: [Male JST Battery Pigtail](http://www.getfpv.com/male-jst-battery-pigtail-10cm-10pcs-bag.html)
+- Video Antennas: [TBS Triumph 5.8GHz CP](https://www.getfpv.com/fpv/antennas/tbs-triumph-5-8ghz-cp-fpv-antenna-3275.html) (SMA port fits ImmercionRC Tx)
+- FPV voltage source plug: [Male JST Battery Pigtail](https://www.getfpv.com/male-jst-battery-pigtail-10cm-10pcs-bag.html)
:::info
These parts cover the sending side for standard FPV 5.8GHz analog FM video. You need to have a compatible receiver and display device to actually consume the live video stream.
@@ -204,7 +204,7 @@ You'll need the additional FPV parts listed at the beginning.
The FPV transmission described here is electronically independent of the flight controller, it only takes the battery voltage after the power module.
I first did a bench test to make sure everything is working correctly.
-For this connect the video signal cable that comes with your transmitter and plug it to the back of your FPV camera and to the matching plug of the transmitter. Screw the Then connect the JST power plug to your draft vehicle or to some other voltage source.
+For this connect the video signal cable that comes with your transmitter and plug it to the back of your FPV camera and to the matching plug of the transmitter. Screw the Then connect the JST power plug to your draft vehicle or to some other voltage source.
The transmitter LED should light up.
Use your 5.8GHz receiver device tuned in to the correct channel to check for the video.
To configure the transmitter to an other channel and adjust the transmission power please refer to the [Tramp HV User Manual](https://www.immersionrc.com/?download=5016).
@@ -225,7 +225,7 @@ I mounted it like you can see in the next picture. The two screws and nuts to lo
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/zh/frames_plane/reptile_dragon_2.md b/docs/zh/frames_plane/reptile_dragon_2.md
index abd7c2bb4d6..1a26d29c990 100644
--- a/docs/zh/frames_plane/reptile_dragon_2.md
+++ b/docs/zh/frames_plane/reptile_dragon_2.md
@@ -62,19 +62,19 @@ Key build features
- [DJI FPV Goggles](https://www.dji.com/fpv)
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24)
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24)
- [5V BEC](https://www.readymaderc.com/products/details/rmrc-3a-power-regulator-5-to-6-volt-ubec)
- [6s2p 18650 LiIon flight battery](https://www.upgradeenergytech.com/product-page/6s-22-2v-5600mah-30c-dark-lithium-liion-drone-battery) (select XT60 connector)
-- [Custom designed 3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/rd2_3d_printed_parts.zip)
+- [Custom designed 3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/rd2_3d_printed_parts.zip)
- ARK6X carrier mount
- Holybro Pixhawk 5x carrier mount
- FPV pod and camera mount
- Pitot static probe "plug" adapter
-- [Custom designed power distribution PCB](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/xt30_power_distro_pcb.zip)
+- [Custom designed power distribution PCB](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/xt30_power_distro_pcb.zip)
- Misc hardware: M3 hardware (standoffs, washers, O-rings, bolts), M2.5 nylon standoffs and screws, XT30 connectors, hot glue, heatshrink, Molex Microfit connectors
@@ -377,7 +377,7 @@ make ark_fmu-v6x_default upload
This param file contains the custom PX4 parameter configuration for this build, including radio setup, tuning and sensor config.
Load the file via QGC using the instructions at [Parameters> Tools](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/parameters.html#tools) (QGC User Guide).
-- [Snapshot of PX4 airframe params](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/reptile_dragon_2_params.params)
+- [Snapshot of PX4 airframe params](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/reptile_dragon_2_params.params)
You may need to modify some parameters for your build
In particular you should check:
diff --git a/docs/zh/frames_plane/turbo_timber_evolution.md b/docs/zh/frames_plane/turbo_timber_evolution.md
index b6d0a52d1f7..ca27b9400aa 100644
--- a/docs/zh/frames_plane/turbo_timber_evolution.md
+++ b/docs/zh/frames_plane/turbo_timber_evolution.md
@@ -54,9 +54,9 @@ Key Build Features:
- [DJI FPV Goggles](https://www.dji.com/fpv)
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24)
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24)
-- [Custom designed 3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip)
+- [Custom designed 3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip)
- Pixhawk 4 Mini mount and top GPS mount
- FPV pod and camera mount
- Pitot static pod and wing hardpoint hanger
@@ -117,7 +117,7 @@ After the first flight, the lid was hot glued in place.
## Flight Computer Installation
-A custom mount for the PX4 Mini was designed and 3d printed (see [3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip) for all parts).
+A custom mount for the PX4 Mini was designed and 3d printed (see [3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip) for all parts).
This mount was carefully designed to use internal foam mold features of the stock TTE airframe to be securely attached and well aligned.
The mount consists of two parts in a double-decker configuration, bolted together with M3 threaded standoffs.
The bottom mount carries the Pixhawk and attaches to the airframe while the top mount carries the GPS and ExpressLRS RX.
@@ -238,7 +238,7 @@ I use full flaps on landing to slow the otherwise slippery airframe.
### Parameter File
-[Snapshot of PX4 airframe params](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/tteparams.params)
+[Snapshot of PX4 airframe params](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/tteparams.params)
This param file contains the custom PX4 parameter config for this build, including radio setup, tuning and sensor config.
The param file can be loaded via QGC using the instructions at [Parameters> Tools ](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/parameters.html#tools) (QGC User Guide).
diff --git a/docs/zh/frames_rover/rover_position_control.md b/docs/zh/frames_rover/rover_position_control.md
index 7208306b674..1b584f41813 100644
--- a/docs/zh/frames_rover/rover_position_control.md
+++ b/docs/zh/frames_rover/rover_position_control.md
@@ -110,8 +110,8 @@ The idea was to develop a platform that allows for easy control of wheeled UGVs
- [Pixhawk Mini (Discontinued)](../flight_controller/pixhawk_mini.md)
- 3DR 10S Power Module
- 3DR 433MHz Telemetry Module (EU)
-- [Spektrum Dxe Controller](http://www.spektrumrc.com/Products/Default.aspx?ProdId=SPM1000) or other PX4-compatible remotes
-- [Spektrum Quad Race Serial Receiver w/Diversity](http://www.spektrumrc.com/Products/Default.aspx?ProdID=SPM4648)
+- [Spektrum Dxe Controller](https://www.spektrumrc.com/product/dxe-dsmx-transmitter-with-ar610/SPM1000.html) or other PX4-compatible remotes
+- [Spektrum Quad Race Serial Receiver w/Diversity](https://www.spektrumrc.com/product/dsmx-quad-race-serial-receiver-with-diversity/SPM4648.html)
- [PX4Flow](../sensor/px4flow.md) (Deprecated)
### 组装
@@ -133,7 +133,7 @@ Tests showed that a better vibration insulation should be used, especially for t
For this particular mounting we chose to use the clip supplied with the rover to attach the upper plate.
For this, two supports were 3D printed.
-The CAD files are provided [here](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/rover/traxxas_stampede_vxl/plane_holders.zip).
+The CAD files are provided [here](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/rover/traxxas_stampede_vxl/plane_holders.zip).
:::warning
It is **HIGHLY RECOMMENDED** to set the ESC in training mode (see Traxxas Stampede Manual), which reduces power to 50%.
diff --git a/docs/zh/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md b/docs/zh/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
index 6f62eb6cc27..57e43f901d2 100644
--- a/docs/zh/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
+++ b/docs/zh/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
@@ -28,9 +28,9 @@ Almost everything you need is provided in the RTF kit (the links next to compone
- GPS u-blox M8N
- Power Sensor
- [Airspeed Sensor](https://store-drotek.com/793-digital-differential-airspeed-sensor-kit-.html)
-- Quad power set [Tiger Motor MT-2216-11 900kv V2](https://www.getfpv.com/tiger-motor-mt-2216-11-900kv-v2.html) (discontinued)
+- Quad power set [Tiger Motor MT-2216-11 900kv V2](https://www.getfpv.com/tiger-motor-mt-2216-11-900kv-v2.html) (discontinued)
- 4 x propeller 10”x 5” (quad motors)
-- 4 x [ESC 25A](http://www.getfpv.com/tiger-motor-flame-25a-esc.html)
+- 4 x [ESC 25A](https://www.getfpv.com/tiger-motor-flame-25a-esc.html)
- 1 x propeller 10” x 5” (pusher motor)
- 1 x ESC 30A
- Pusher motor power system
@@ -142,11 +142,11 @@ For example, you might wire it up like this example (orientation as if "sitting
| MAIN 2 | Back left motor, CCW |
| MAIN 3 | Front left motor, CW |
| MAIN 4 | Back right motor, CW |
-| AUX 1 | Left aileron |
-| AUX 2 | Right aileron |
-| AUX 3 | Elevator |
-| AUX 4 | Rudder |
-| AUX 5 | 油门 |
+| AUX 1 | Left aileron |
+| AUX 2 | Right aileron |
+| AUX 3 | Elevator |
+| AUX 4 | Rudder |
+| AUX 5 | 油门 |
@@ -255,7 +255,6 @@ The final assembly step is to check the vehicle is stable and that the motors ha
:::
2. Check the vehicle is balanced around the expected centre of gravity
-
- Hold the vehicle with your fingers at the center of gravity and check that the vehicle remains stable.

diff --git a/docs/zh/frames_vtol/vtol_quadplane_foxtech_loong_2160.md b/docs/zh/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
index a074cc2e8f3..a91e28133ba 100644
--- a/docs/zh/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
+++ b/docs/zh/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
@@ -51,7 +51,7 @@ The following options have been tested:
- [Groundstation and Radio link](https://holybro.com/collections/rc-radio-transmitter-receiver/products/skydroid-h12?variant=42940989931709)
- [USB-C extension cable](https://www.digitec.ch/en/s1/product/powerguard-usb-c-usb-c-025-m-usb-cables-22529949?dbq=1&gclid=Cj0KCQjw2cWgBhDYARIsALggUhrh-z-7DSU0wKfLBVa8filkXLQaxUpi7pC0ffQyRzLng8Ph01h2R1gaAp0mEALw_wcB&gclsrc=aw.ds)
- [I2C Splitter](https://www.3dxr.co.uk/autopilots-c2/the-cube-aka-pixhawk-2-1-c9/cube-cables-accessories-sensors-c15/cubepilot-i2c-can-splitter-jst-gh-4pin-p2840)
-- [3D-Printed mounts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong-3d-prints.zip)
+- [3D-Printed mounts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong-3d-prints.zip)
- 1x Baseplate
- 1x Stack-fixture
- 1x Fan-Mount
@@ -291,12 +291,12 @@ If you wish connect the actuators to different outputs you will need to modify t
### Load Parameters File
-Next we load a [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
+Next we load a [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
If you have followed the wiring instructions for the motors you probably won't need to do much further configuration other than sensor calibration and fixing the trims.
To load the file:
-1. Download the [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong.params).
+1. Download the [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong.params).
2. Select the [Parameters](../advanced_config/parameters.md#finding-updating-parameters) tab and then click on **Tools** in the top right corner.
3. Select **Load from file** and then choose the `loong.params` file you just downloaded.
4. Reboot the vehicle.
diff --git a/docs/zh/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md b/docs/zh/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
index ba91a5ea522..36d4c03e762 100644
--- a/docs/zh/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
+++ b/docs/zh/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
@@ -13,7 +13,7 @@ A number of other components have been updated in the parts list too.
## 配件列表
- TBS Caipirinha Wing (no longer available - try [TBS Caipirinha 2](https://team-blacksheep.com/products/prod:tbs_caipi2_pnp))
-- Left and right 3D-printed motor mount (design files)
+- Left and right 3D-printed motor mount (design files)
- CW 8045 propeller ([Eflight store](https://www.banggood.com/GEMFAN-Carbon-Nylon-8045-CWCCW-Propeller-For-Quadcopters-1-Pair-p-950874.html))
- CCW 8045 propeller ([Eflight store](https://www.banggood.com/GEMFAN-Carbon-Nylon-8045-CWCCW-Propeller-For-Quadcopters-1-Pair-p-950874.html))
- 2 x 1800kv 120-180W电机
diff --git a/docs/zh/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md b/docs/zh/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
index b5c4bad3283..2a96f0965e8 100644
--- a/docs/zh/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
+++ b/docs/zh/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
@@ -47,12 +47,12 @@ The approximate maximum size of the FC is: 50x110x22mm
- [Airspeed sensor (cheaper alternative)](https://holybro.com/products/digital-air-speed-sensor?pr_prod_strat=use_description&pr_rec_id=236dfda00&pr_rec_pid=7150470561981&pr_ref_pid=7150472462525&pr_seq=uniform)
- [Lidar Lightware lw20-c (included in Skynode eval. kit)](../sensor/sfxx_lidar.md) (Optional)
- [Lidar Seeed Studio PSK-CM8JL65-CC5 (cheaper alternative)](https://www.seeedstudio.com/PSK-CM8JL65-CC5-Infrared-Distance-Measuring-Sensor-p-4028.html) (Optional)
-- [5V BEC](http://www.mateksys.com/?portfolio=bec12s-pro)
+- [5V BEC](https://www.mateksys.com/?portfolio=bec12s-pro)
- [Radio (RC) System](../getting_started/rc_transmitter_receiver.md) of your preference
- [Servo cable extension cable male 30cm 10 pcs](https://www.getfpv.com/male-to-male-servo-extension-cable-twisted-22awg-jr-style-5-pcs.html)
- [USB-C extension cable](https://www.digitec.ch/en/s1/product/powerguard-usb-c-usb-c-025-m-usb-cables-22529949?dbq=1&gclid=Cj0KCQjw2cWgBhDYARIsALggUhrh-z-7DSU0wKfLBVa8filkXLQaxUpi7pC0ffQyRzLng8Ph01h2R1gaAp0mEALw_wcB&gclsrc=aw.ds)
- [3M VHB tape](https://www.amazon.in/3M-VHB-Tape-4910-Length/dp/B00GTABM3Y)
-- [3D-Printed mounts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo_3d_prints.zip)
+- [3D-Printed mounts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo_3d_prints.zip)
- 2x wing connector mount
- 1x Airspeed sensor mount
- 1x GPS-Mount
@@ -159,7 +159,6 @@ The connector glued into the fuselage. Make sure to properly align the connector
If you own a crimp tool, then you can also directly add the connectors without soldering.
2. Plug the servo cables into the adapter IO board in the following order:
-
- 1 - Aileron left
- 2 - Aileron right
- 3 - V-Tail left
@@ -168,7 +167,6 @@ The connector glued into the fuselage. Make sure to properly align the connector
- 6 - Tilt right
3. Plug in the motor signal cables into the FMU adapter board in the following order:
-
- 1 - Front left
- 2 - Front right
- 3 - Rear
@@ -281,12 +279,12 @@ An inexpensive example would be a [SiK Telemetry Radio](../telemetry/sik_radio.m
### Load Parameters File
-Next we load a [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
+Next we load a [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
If you have followed the wiring instructions for the motors you probably won't need to do much further configuration other than sensor calibration and fixing the trims.
To load the file:
-1. Download the [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params).
+1. Download the [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params).
2. Select the [Parameters](../advanced_config/parameters.md#finding-updating-parameters) tab and then click on **Tools** in the top right corner.
3. Select **Load from file** and then choose the `omp_hobby_zmo.params` file you just downloaded.
4. Reboot the vehicle.
diff --git a/docs/zh/getting_started/flight_reporting.md b/docs/zh/getting_started/flight_reporting.md
index fcdf932ed61..366d304db87 100644
--- a/docs/zh/getting_started/flight_reporting.md
+++ b/docs/zh/getting_started/flight_reporting.md
@@ -9,7 +9,7 @@ Keeping flight logs is a legal requirement in some jurisdictions.
## 从飞行控制器下载日志
-Logs can be downloaded using [QGroundControl](http://qgroundcontrol.com/): **[Analyze View > Log Download](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/analyze_view/log_download.html)**.
+Logs can be downloaded using [QGroundControl](https://qgroundcontrol.com/): **[Analyze View > Log Download](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/analyze_view/log_download.html)**.

@@ -21,7 +21,7 @@ You can also host a [private Flight Review server](../dev_log/log_encryption.md#
## 分析日志
-Upload the log file to the online [Flight Review](http://logs.px4.io) tool.
+Upload the log file to the online [Flight Review](https://logs.px4.io/) tool.
After upload you'll be emailed a link to the analysis page for the log.
[Log Analysis using Flight Review](../log/flight_review.md) explains how to interpret the plots, and can help you to verify/reject the causes of common problems: excessive vibration, poor PID tuning, saturated controllers, imbalanced vehicles, GPS noise, etc.
@@ -38,17 +38,17 @@ For more information see [Settings > MAVLink Settings > MAVLink 2 Logging (PX4 o
## 给 PX4 开发人员共享日志文件
-The [Flight Review](http://logs.px4.io) log file link can be shared for discussion in the [support forums](../contribute/support.md#forums-and-chat) or a [Github issue](../index.md#reporting-bugs-issues).
+The [Flight Review](https://logs.px4.io/) log file link can be shared for discussion in the [support forums](../contribute/support.md#forums-and-chat) or a [Github issue](../index.md#reporting-bugs-issues).
## Log Configuration
-The logging system is configured by default to collect sensible logs for use with [Flight Review](http://logs.px4.io).
+The logging system is configured by default to collect sensible logs for use with [Flight Review](https://logs.px4.io/).
Logging may further be configured using the [SD Logging](../advanced_config/parameter_reference.md#sd-logging) parameters or with a file on the SD card.
Details on configuration can be found in the [logging configuration documentation](../dev_log/logging.md#configuration).
## 主链接
-- [Flight Review](http://logs.px4.io)
+- [Flight Review](https://logs.px4.io/)
- [Log Analysis using Flight Review](../log/flight_review.md)
- [Flight Log Analysis](../dev_log/flight_log_analysis.md)
diff --git a/docs/zh/getting_started/px4_basic_concepts.md b/docs/zh/getting_started/px4_basic_concepts.md
index ad37898f708..ba5e69333af 100644
--- a/docs/zh/getting_started/px4_basic_concepts.md
+++ b/docs/zh/getting_started/px4_basic_concepts.md
@@ -62,9 +62,9 @@ PX4的一些主要功能包括:
- Supports many different vehicle frames/types, including: [multicopters](../frames_multicopter/index.md), [fixed-wing aircraft](../frames_plane/index.md) (planes), [VTOLs](../frames_vtol/index.md) (hybrid multicopter/fixed-wing), [ground vehicles](../frames_rover/index.md), and [underwater vehicles](../frames_sub/index.md).
- Great choice of drone components for [flight controller](#flight-controller), [sensors](#sensors), [payloads](#payloads), and other peripherals.
- Flexible and powerful [flight modes](#flight-modes) and [safety features](#safety-settings-failsafe).
-- Robust and deep integration with [companion computers](#offboard-companion-computer) and [robotics APIs](../robotics/index.md) such as [ROS 2](../ros2/user_guide.md) and [MAVSDK](http://mavsdk.mavlink.io).
+- Robust and deep integration with [companion computers](#offboard-companion-computer) and [robotics APIs](../robotics/index.md) such as [ROS 2](../ros2/user_guide.md) and [MAVSDK](https://mavsdk.mavlink.io/main/en/index.html).
-PX4 is a core part of a broader drone platform that includes the [QGroundControl](#qgc) ground station, [Pixhawk hardware](https://pixhawk.org/), and [MAVSDK](http://mavsdk.mavlink.io) for integration with companion computers, cameras and other hardware using the MAVLink protocol.
+PX4 is a core part of a broader drone platform that includes the [QGroundControl](#qgc) ground station, [Pixhawk hardware](https://pixhawk.org/), and [MAVSDK](https://mavsdk.mavlink.io/main/en/index.html) for integration with companion computers, cameras and other hardware using the MAVLink protocol.
PX4 is supported by the [Dronecode Project](https://www.dronecode.org/).
## Ground Control Stations
@@ -74,9 +74,9 @@ A subset of the products that are known to work with PX4 are listed below.
### QGroundControl {#qgc}
-The Dronecode GCS software is called [QGroundControl](http://qgroundcontrol.com/) ("QGC").
+The Dronecode GCS software is called [QGroundControl](https://qgroundcontrol.com/) ("QGC").
It runs on Windows, Android, MacOS or Linux hardware, and supports a wide range of screen form factors.
-You can download it (for free) from [here](http://qgroundcontrol.com/downloads/).
+You can download it (for free) from [here](https://qgroundcontrol.com/downloads/).

diff --git a/docs/zh/getting_started/rc_transmitter_receiver.md b/docs/zh/getting_started/rc_transmitter_receiver.md
index e79610dc57a..dd2792504c5 100644
--- a/docs/zh/getting_started/rc_transmitter_receiver.md
+++ b/docs/zh/getting_started/rc_transmitter_receiver.md
@@ -98,7 +98,6 @@ _PX4_ and _Pixhawk_ have been validated with:
- PPM sum receivers
- S.BUS and S.BUS2 receivers from:
-
- Futaba
- FrSky S.BUS and PPM models
- TBS Crossfire with SBUS as output protocol
@@ -130,7 +129,7 @@ The receivers we have tested all now appear to be compatible, but it is possible
- Graupner HoTT receivers: SUMD output must connect to a **SPKT/DSM** input (as above).
- PPM-Sum and S.BUS receivers must connect directly to the **RC** ground, power and signal pins.
This is typically labeled: `RC IN`, `RCIN` or `RC`, but has in some FCs has been labeled `PPM RC` or `PPM`.
-- PPM receivers that have an individual wire for each channel must connect to the RCIN channel _via_ a PPM encoder [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM receivers that have an individual wire for each channel must connect to the RCIN channel _via_ a PPM encoder [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
- TBS Crossfire/Express LRS Receivers using [CRSF Telemetry](../telemetry/crsf_telemetry.md) connect via a spare UART.
Flight controllers usually include appropriate cables for connecting common receiver types.
diff --git a/docs/zh/gps_compass/gps_hex_here2.md b/docs/zh/gps_compass/gps_hex_here2.md
index 77b981dcbb2..efd6a370258 100644
--- a/docs/zh/gps_compass/gps_hex_here2.md
+++ b/docs/zh/gps_compass/gps_hex_here2.md
@@ -4,7 +4,7 @@
This has been superseded by the [Cube Here 3](https://www.cubepilot.com/#/here/here3)
:::
-The [Here2 GPS receiver](http://www.proficnc.com/all-products/152-gps-module.html) is an update to the Here GPS module from HEX.
+The _Here2 GPS receiver_ is an update to the Here GPS module from HEX.
Main features include:
@@ -18,8 +18,7 @@ Main features include:
## 购买渠道
-- [ProfiCNC](http://www.proficnc.com/all-products/152-gps-module.html) (Australia)
-- [Other resellers](http://www.proficnc.com/stores)
+- [Resellers](https://www.cubepilot.com/#/reseller/list)
## 配置
@@ -34,7 +33,7 @@ Setup and use on PX4 is largely plug and play.
## 接线和连接
-The Here2 GPS comes with an 8 pin connector that can be inserted directly into the [Pixhawk 2](http://www.hex.aero/wp-content/uploads/2016/07/DRS_Pixhawk-2-17th-march-2016.pdf) GPS UART port.
+The Here2 GPS comes with an 8 pin connector that can be inserted directly into the Pixhawk 2 `GPS` UART port.
The Pixhawk 3 Pro and Pixracer have a 6 pin GPS port connector.
For these controllers you can modify the GPS cable (as shown below) to remove pin 6 and 7.
diff --git a/docs/zh/gps_compass/index.md b/docs/zh/gps_compass/index.md
index 3e0aeba21d1..d4d5a030bd4 100644
--- a/docs/zh/gps_compass/index.md
+++ b/docs/zh/gps_compass/index.md
@@ -47,7 +47,7 @@ PX4 also supports [Real Time Kinematic (RTK)](../gps_compass/rtk_gps.md) and **P
| [mRo GPS u-blox Neo-M8N Dual Compass][mro_neo8mn_dual_mag] | M8N | LIS3MDL, IST8308 | | ✘ | |
| [RaccoonLab L1 GNSS NEO-M8N][RccnLabGNSS250] | NEO-M8N | RM3100 | ✓ | ✘✘✓ | + Baro |
| [Sky-Drones SmartAP GPS](../gps_compass/gps_smartap.md) | M8N | HMC5983, IST8310, LIS3MDL | | ✓ | + Baro |
-| [Zubax GNSS 2](https://zubax.com/products/gnss_2) | MAX-M8Q | LIS3MDL | | ✘ | + Baro |
+| [Zubax GNSS 2](https://shop.zubax.com/products/zubax-gnss-2) | MAX-M8Q | LIS3MDL | | ✘ | + Baro |
@@ -145,7 +145,6 @@ To ensure the port is set up correctly perform a [Serial Port Configuration](../
The following steps show how to configure a secondary GPS on the `GPS 2` port in _QGroundControl_:
1. [Find and set](../advanced_config/parameters.md) the parameter [GPS_2_CONFIG](../advanced_config/parameter_reference.md#GPS_2_CONFIG) to **GPS 2**.
-
- Open _QGroundControl_ and navigate to the **Vehicle Setup > Parameters** section.
- Select the **GPS** tab, then open the [GPS_2_CONFIG](../advanced_config/parameter_reference.md#GPS_2_CONFIG) parameter and select `GPS 2` from the dropdown list.
diff --git a/docs/zh/gps_compass/rtk_gps.md b/docs/zh/gps_compass/rtk_gps.md
index 453c04eaa87..ced94901674 100644
--- a/docs/zh/gps_compass/rtk_gps.md
+++ b/docs/zh/gps_compass/rtk_gps.md
@@ -14,46 +14,47 @@ Some RTK GNSS setups can provide yaw/heading information, as an alternative to t
## 支持的 RTK 设备
-PX4 supports the [u-blox M8P](https://www.u-blox.com/en/product/neo-m8p), [u-blox F9P](https://www.u-blox.com/en/product/zed-f9p-module) and the [Trimble MB-Two](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) GPS, and products that incorporate them.
+PX4 supports the [u-blox M8P](https://www.u-blox.com/en/product/neo-m8p), [u-blox F9P](https://www.u-blox.com/en/product/zed-f9p-module) and the [Trimble MB-Two](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) GPS, and products that incorporate them.
The RTK compatible devices below that are expected to work with PX4 (it omits discontined devices).
The table indicates devices that also output yaw, and that can provide yaw when two on-vehicle units are used.
It also highlights devices that connect via the CAN bus, and those which support PPK (Post-Processing Kinematic).
-| 设备 | GPS | 罗盘 | [DroneCAN](../dronecan/index.md) | [GPS Yaw](#configuring-gps-as-yaw-heading-source) | PPK |
-| :------------------------------------------------------------------------------------------------------------------- | :------------------: | :-------------------------: | :------------------------------: | :-----------------------------------------------: | :-------------------------: |
-| [ARK RTK GPS](../dronecan/ark_rtk_gps.md) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
-| [ARK MOSAIC-X5 RTK GPS](../dronecan/ark_mosaic__rtk_gps.md) | Mosaic-X5 | IIS2MDC | ✓ | [Septentrio Dual Antenna][SeptDualAnt] | |
-| [CUAV C-RTK GPS](../gps_compass/rtk_gps_cuav_c-rtk.md) | M8P/M8N | ✓ | | | |
-| [CUAV C-RTK2](../gps_compass/rtk_gps_cuav_c-rtk2.md) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [CUAV C-RTK 9Ps GPS](../gps_compass/rtk_gps_cuav_c-rtk-9ps.md) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [CUAV C-RTK2 PPK/RTK GNSS](../gps_compass/rtk_gps_cuav_c-rtk.md) | F9P | RM3100 | | | ✓ |
-| [CubePilot Here+ RTK GPS](../gps_compass/rtk_gps_hex_hereplus.md) | M8P | HMC5983 | | | |
-| [CubePilot Here3 CAN GNSS GPS (M8N)](https://www.cubepilot.org/#/here/here3) | M8P | ICM20948 | ✓ | | |
-| [Drotek SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [DATAGNSS GEM1305 RTK Receiver][DATAGNSS GEM1305 RTK] | TAU951M | ✘ | | ✘ | |
-| [Femtones MINI2 Receiver](../gps_compass/rtk_gps_fem_mini2.md) | FB672, FB6A0 | ✓ | | | |
-| [Freefly RTK GPS](../gps_compass/rtk_gps_freefly.md) | F9P | IST8310 | | | |
-| [Holybro H-RTK ZED-F9P RTK Rover (DroneCAN variant)](../dronecan/holybro_h_rtk_zed_f9p_gps.md) | F9P | RM3100 | ✓ | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK ZED-F9P RTK Rover](https://holybro.com/collections/h-rtk-gps/products/h-rtk-zed-f9p-rover) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Ultralight](https://holybro.com/products/h-rtk-f9p-ultralight) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Helical or Base](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
-| [Holybro DroneCAN H-RTK F9P Helical](https://holybro.com/products/dronecan-h-rtk-f9p-helical) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Rover Lite](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | | |
-| [Holybro DroneCAN H-RTK F9P Rover](https://holybro.com/products/dronecan-h-rtk-f9p-rover) | F9P | BMM150 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK M8P GNSS](../gps_compass/rtk_gps_holybro_h-rtk-m8p.md) | M8P | IST8310 | | | |
-| [Holybro H-RTK Unicore UM982 GPS](../gps_compass/rtk_gps_holybro_unicore_um982.md) | UM982 | IST8310 | | [Unicore Dual Antenna][UnicoreDualAnt] | |
-| [LOCOSYS Hawk R1](../gps_compass/rtk_gps_locosys_r1.md) | MC-1612-V2b | | | | |
-| [LOCOSYS Hawk R2](../gps_compass/rtk_gps_locosys_r2.md) | MC-1612-V2b | IST8310 | | | |
-| [mRo u-blox ZED-F9 RTK L1/L2 GPS](https://store.mrobotics.io/product-p/m10020d.htm) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [Navisys L1/L2 ZED-F9P RTK - Base only](https://www.navisys.com.tw/productdetail?name=GR901&class=RTK) | F9P | | | | |
-| [RaccoonLab L1/L2 ZED-F9P][RaccoonLab L1/L2 ZED-F9P] | F9P | RM3100 | ✓ | | |
-| [RaccoonLab L1/L2 ZED-F9P with external antenna][RaccnLabL1L2ZED-F9P ext_ant] | F9P | RM3100 | ✓ | | |
-| [Septentrio AsteRx-m3 Pro](../gps_compass/septentrio_asterx-rib.md) | AsteRx | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
-| [Septentrio mosaic-go](../gps_compass/septentrio_mosaic-go.md) | mosaic X5 / mosaic H | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
-| [SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [SparkFun GPS-RTK2 Board - ZED-F9P](https://www.sparkfun.com/products/15136) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [Trimble MB-Two](../gps_compass/rtk_gps_trimble_mb_two.md) | F9P | ✓ | | ✓ | |
+| 设备 | GPS | 罗盘 | [DroneCAN](../dronecan/index.md) | [GPS Yaw](#configuring-gps-as-yaw-heading-source) | PPK |
+| :------------------------------------------------------------------------------------------------------------------- | :---------------------------------------------------------: | :-------------------------: | :------------------------------: | :-----------------------------------------------: | :-------------------------: |
+| [ARK RTK GPS](../dronecan/ark_rtk_gps.md) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
+| [ARK MOSAIC-X5 RTK GPS](../dronecan/ark_mosaic__rtk_gps.md) | Mosaic-X5 | IIS2MDC | ✓ | [Septentrio Dual Antenna][SeptDualAnt] | |
+| [CUAV C-RTK GPS](../gps_compass/rtk_gps_cuav_c-rtk.md) | M8P/M8N | ✓ | | | |
+| [CUAV C-RTK2](../gps_compass/rtk_gps_cuav_c-rtk2.md) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [CUAV C-RTK 9Ps GPS](../gps_compass/rtk_gps_cuav_c-rtk-9ps.md) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [CUAV C-RTK2 PPK/RTK GNSS](../gps_compass/rtk_gps_cuav_c-rtk.md) | F9P | RM3100 | | | ✓ |
+| [CubePilot Here+ RTK GPS](../gps_compass/rtk_gps_hex_hereplus.md) | M8P | HMC5983 | | | |
+| [CubePilot Here3 CAN GNSS GPS (M8N)](https://www.cubepilot.org/#/here/here3) | M8P | ICM20948 | ✓ | | |
+| [Drotek SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [DATAGNSS NANO HRTK Receiver](../gps_compass/rtk_gps_datagnss_nano_hrtk.md) | [D10P](https://docs.datagnss.com/gnss/gnss_module/D10P_RTK) | IST8310 | | ✘ | |
+| [DATAGNSS GEM1305 RTK Receiver](../gps_compass/rtk_gps_gem1305.md) | TAU951M | IST8310 | | ✘ | |
+| [Femtones MINI2 Receiver](../gps_compass/rtk_gps_fem_mini2.md) | FB672, FB6A0 | ✓ | | | |
+| [Freefly RTK GPS](../gps_compass/rtk_gps_freefly.md) | F9P | IST8310 | | | |
+| [Holybro H-RTK ZED-F9P RTK Rover (DroneCAN variant)](../dronecan/holybro_h_rtk_zed_f9p_gps.md) | F9P | RM3100 | ✓ | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK ZED-F9P RTK Rover](https://holybro.com/collections/h-rtk-gps/products/h-rtk-zed-f9p-rover) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Ultralight](https://holybro.com/products/h-rtk-f9p-ultralight) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Helical or Base](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
+| [Holybro DroneCAN H-RTK F9P Helical](https://holybro.com/products/dronecan-h-rtk-f9p-helical) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Rover Lite](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | | |
+| [Holybro DroneCAN H-RTK F9P Rover](https://holybro.com/products/dronecan-h-rtk-f9p-rover) | F9P | BMM150 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK M8P GNSS](../gps_compass/rtk_gps_holybro_h-rtk-m8p.md) | M8P | IST8310 | | | |
+| [Holybro H-RTK Unicore UM982 GPS](../gps_compass/rtk_gps_holybro_unicore_um982.md) | UM982 | IST8310 | | [Unicore Dual Antenna][UnicoreDualAnt] | |
+| [LOCOSYS Hawk R1](../gps_compass/rtk_gps_locosys_r1.md) | MC-1612-V2b | | | | |
+| [LOCOSYS Hawk R2](../gps_compass/rtk_gps_locosys_r2.md) | MC-1612-V2b | IST8310 | | | |
+| [mRo u-blox ZED-F9 RTK L1/L2 GPS](https://store.mrobotics.io/product-p/m10020d.htm) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [Navisys L1/L2 ZED-F9P RTK - Base only](https://www.navisys.com.tw/productdetail?name=GR901&class=RTK) | F9P | | | | |
+| [RaccoonLab L1/L2 ZED-F9P][RaccoonLab L1/L2 ZED-F9P] | F9P | RM3100 | ✓ | | |
+| [RaccoonLab L1/L2 ZED-F9P with external antenna][RaccnLabL1L2ZED-F9P ext_ant] | F9P | RM3100 | ✓ | | |
+| [Septentrio AsteRx-m3 Pro](../gps_compass/septentrio_asterx-rib.md) | AsteRx | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
+| [Septentrio mosaic-go](../gps_compass/septentrio_mosaic-go.md) | mosaic X5 / mosaic H | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
+| [SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [SparkFun GPS-RTK2 Board - ZED-F9P](https://www.sparkfun.com/products/15136) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [Trimble MB-Two](../gps_compass/rtk_gps_trimble_mb_two.md) | F9P | ✓ | | ✓ | |
@@ -142,7 +143,6 @@ The RTK GPS connection is essentially plug and play:

4. 测量完成:
-
- The RTK GPS icon changes to white and _QGroundControl_ starts to stream position data to the vehicle:

diff --git a/docs/zh/gps_compass/rtk_gps_datagnss_nano_hrtk.md b/docs/zh/gps_compass/rtk_gps_datagnss_nano_hrtk.md
new file mode 100644
index 00000000000..4a0bcc8152a
--- /dev/null
+++ b/docs/zh/gps_compass/rtk_gps_datagnss_nano_hrtk.md
@@ -0,0 +1,123 @@
+# DATAGNSS NANO HRTK receiver
+
+NANO HRTK receiver is a RTK receiver designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
+
+It is a high performance dual-band RTK receiver with compass, which is based on CYNOSURE series chipset.
+It supports global civil navigation systems, including GPS, BDS, GLONASS, Galileo, QZSS, and SBAS.
+
+NANO HRTK receiver support compass.
+It is designed for UAV, RTK, and other applications.
+
+
+
+:::info
+The NANO HRTK Receiver supports both base and rover options.
+It does not yet support _moving base_ mode.
+:::
+
+## 购买渠道
+
+- [NANO HRTK receiver](https://www.datagnss.com/collections/gnss-for-drone/products/nano-helix-rtk-receiver) (www.datagnss.com)
+
+## 主要特性
+
+- Full constellation, multi-frequency GNSS satellite receiver
+- Support RTK with up to 10hz output rate
+- Standard UART serial interface
+- Lightweight and compact size
+
+## Frequencies
+
+- GPS/QZSS: L1 C/A, L5C
+- GLONASS: L1OF
+- BEIDOU: B1I, B2a
+- GALILEO: E1, E5a
+- IRNSS: L5
+
+## GNSS
+
+- 128 hardware channels
+- 3D accuracy: **1.5m** CEP
+- RTK accuracy: **2cm** +1PPM(H), 3cm+1PPM(V)
+
+## Interface
+
+- UART \*2 : 230400bps default
+- SMA connector for antenna
+- Output rate 5Hz default, up to 10Hz
+- Main power supply: 4.7~5.2V
+
+## Protocol
+
+- NMEA-0183 output
+- RTCM3.x input/output
+
+## Environment
+
+- Operating temp. -20~85°C
+
+## Dimension and Weight
+
+- 35x30mm
+- 25g
+
+## 针脚定义
+
+The board is connected to the autopilot via UART interface.
+
+
+
+The 1.25mm pitch 6P connector supports UART for GNSS and I2C for compass.
+
+
+
+## 硬件安装
+
+RTK requires a base RTK module attached to the ground station, and a rover RTK module on the vehicle.
+The data from the base needs to be transmitted to the drone via telemetry radio and sent to the RTK receiver on the rover.
+
+
+
+The setup/connections for base and rover modules are shown below.
+
+### Base Setup (GCS)
+
+The base station connections are shown in the diagram below, along with the connection to a telemetry radio.
+
+
+
+Note that for the base we recommend the [NANO RTK Receiver](https://www.datagnss.com/collections/gnss-for-drone/products/multi-band-rtk-receiver-package) because it is easier to setup.
+
+
+
+See to [How to setup Base station](https://wiki.datagnss.com/index.php/GEM1305-autopilot#Base_station_setup) for information on how to configure the module for use as a base station (not including step 6 and later, for which you would QGroundControl instead of Mission Planner).
+
+### Rover Setup (PX4)
+
+The rover setup showing connections to a GPS port and the (required) connection to a telemetry radio are shown in the diagram below.
+
+
+
+The diagram below shows the wiring from the `GPS2` port on the Pixhawk 6c flight controller.
+Note that an appropriate cable is supplied for this purpose.
+
+GPS and RTK configuration on PX4 via _QGroundControl_ is plug and play (see [RTK GPS](../gps_compass/rtk_gps.md) for more information).
+
+## Package List
+
+- NANO HRTK Receiver
+- DG-6P-Cxx, GH-1.25mm-GH 6P cable
+- Helix antenna L1/L2/L5 (optional)
+
+## Resources
+
+- [NANO RTK Receiver 2D drawing file](https://wiki.datagnss.com/images/3/31/EVK-DG-1206_V.2.0.pdf)
+- [NANO HRTK Receiver Wiki](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-helix-rtk/) (DATAGNSS WiKi)
+- [HED-10L Heading RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/HED-10L/)
+
+## More information
+
+- [NANO RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-rtk-receiver)
+- [HELIX Antenna for RTK](https://www.datagnss.com/collections/rtk-antenna/products/smart-helix-antenna)
+- [RTK Antenna AGR6302G](https://www.datagnss.com/collections/rtk-antenna/products/antenna-agr6302g)
+- [AT400 RTK Antenna](https://www.datagnss.com/collections/rtk-antenna/products/at400-multi-band-antenna-for-rtk)
diff --git a/docs/zh/gps_compass/rtk_gps_gem1305.md b/docs/zh/gps_compass/rtk_gps_gem1305.md
index 3e5ba8dd255..7d6c66596aa 100644
--- a/docs/zh/gps_compass/rtk_gps_gem1305.md
+++ b/docs/zh/gps_compass/rtk_gps_gem1305.md
@@ -1,24 +1,22 @@
# DATAGNSS GEM1305 RTK Receiver with antenna
-GEM1305 is a RTK receiver with antenna designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
+GEM1305 is an [RTK GNSS](../gps_compass/rtk_gps.md) receiver with antenna designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
GEM1305 is based on the new generation CYNOSURE IV dual-core GNSS SoC.
It supports RTK functionality with a maximum data update rate of 10Hz, and comes with cables for connecting to GPS ports on most Pixhawk devices.
-
-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/zh/flight_controller/pixhawk_series.md b/docs/zh/flight_controller/pixhawk_series.md
index 695ec601daa..6e983206326 100644
--- a/docs/zh/flight_controller/pixhawk_series.md
+++ b/docs/zh/flight_controller/pixhawk_series.md
@@ -41,7 +41,7 @@ The [Pixhawk project](https://pixhawk.org/) creates open hardware designs in the
Manufacturers are encouraged to take the [open designs](https://github.com/pixhawk/Hardware) and create products that are best suited to a particular market or use case (the physical layout/form factor not part of the open specification). Boards based on the same design are binary compatible.
:::info
-While a physical connector standard is not mandated, newer products generally follow the [Pixhawk Connector Standard](https://pixhawk.org/pixhawk-connector-standard/).
+While a physical connector standard is not mandated, newer products generally follow the [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf).
:::
The project also creates reference autopilot boards based on the open designs, and shares them under the same [licence](#licensing-and-trademarks).
diff --git a/docs/zh/flight_controller/pixracer.md b/docs/zh/flight_controller/pixracer.md
index 6a32b331030..bb021cfe62c 100644
--- a/docs/zh/flight_controller/pixracer.md
+++ b/docs/zh/flight_controller/pixracer.md
@@ -16,7 +16,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
## 主要特性
-- Main System-on-Chip: [STM32F427VIT6 rev.3](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427VIT6 rev.3](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU: 180 MHz ARM Cortex® M4 with single-precision FPU
- RAM: 256 KB SRAM (L1)
- Standard FPV form factor: 36x36 mm with standard 30.5 mm hole pattern
@@ -41,7 +41,8 @@ Accessories include:
## Kit
-The Pixracer is designed to use a separate avionics power supply. This is necessary to avoid current surges from motors or ESCs to flow back to the flight controller and disturb its delicate sensors.
+The Pixracer is designed to use a separate avionics power supply.
+This is necessary to avoid current surges from motors or ESCs to flow back to the flight controller and disturb its delicate sensors.
- Power module (with voltage and current sensing)
- I2C splitter (supporting AUAV, Hobbyking and 3DR® peripherals)
@@ -53,7 +54,7 @@ One of the main features of the board is its ability to use Wifi for flashing ne
This frees it of the need of any desktop system.
- [ESP8266 Wifi](../telemetry/esp8266_wifi_module.md)
-- [Custom ESP8266 MAVLink firmware](https://github.com/dogmaphobic/mavesp8266)
+- [Custom ESP8266 MAVLink firmware](https://github.com/BeyondRobotix/mavesp8266)
:::info
Firmware upgrade is not yet enabled over WiFi (it is supported by the default bootloader but not yet enabled).
@@ -85,7 +86,7 @@ For more information see: [Pixracer Wiring Quickstart > External Telemetry](../a
## 连接器
-All connectors follow the [Pixhawk connector standard](https://pixhawk.org/pixhawk-connector-standard/).
+All connectors follow the [Pixhawk connector standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf).
Unless noted otherwise all connectors are JST GH.
## 针脚定义
@@ -204,8 +205,8 @@ The reference is provided as: [Altium Design Files](https://github.com/AUAV-Open
The following PDF files are provided for _convenience only_:
-- [pixracer-rc12-12-06-2015-1330.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixracer/pixracer-rc12-12-06-2015-1330.pdf)
-- [pixracer-r14.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixracer/pixracer-r14.pdf) - R14 or RC14 is printed next to the SDCard socket
+- [pixracer-rc12-12-06-2015-1330.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixracer/pixracer-rc12-12-06-2015-1330.pdf)
+- [pixracer-r14.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixracer/pixracer-r14.pdf) - R14 or RC14 is printed next to the SDCard socket
## 编译固件
diff --git a/docs/zh/flight_controller/raccoonlab_fmu6x.md b/docs/zh/flight_controller/raccoonlab_fmu6x.md
index ee5920c8dce..97329e68c59 100644
--- a/docs/zh/flight_controller/raccoonlab_fmu6x.md
+++ b/docs/zh/flight_controller/raccoonlab_fmu6x.md
@@ -159,4 +159,4 @@ The complete set of supported configurations can be seen in the [Airframes Refer
- [Pixhawk Autopilot FMUv6X Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-012%20Pixhawk%20Autopilot%20v6X%20Standard.pdf)
- [Pixhawk Autopilot Bus Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-010%20Pixhawk%20Autopilot%20Bus%20Standard.pdf)
- [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf)
-- [RaccoonLab docs](http://docs.raccoonlab.co)
+- [RaccoonLab docs](https://docs.raccoonlab.co/)
diff --git a/docs/zh/flight_controller/thepeach_k1.md b/docs/zh/flight_controller/thepeach_k1.md
index 2fe715a61c4..8f831afabaf 100644
--- a/docs/zh/flight_controller/thepeach_k1.md
+++ b/docs/zh/flight_controller/thepeach_k1.md
@@ -14,21 +14,17 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
## 产品规格
- Main Processor: STM32F427VIT6
-
- 32bit ARM Cortex-M4, 168 MHz 256 KB RAM 2 MB Flash memory
- IO Processor: STM32F100C8T6
-
- ARM Cortex-M3, 32bit ARM Cortex-M3, 24 MHz, 8KB SRAM
- On-board sensors
-
- 加速度计 / 陀螺仪:ICM-20602
- Accel/Gyro/Mag: MPU-9250
- 气压计:MS5611
- 接口
-
- 8+5 PWM output (8 from IO, 5 from FMU)
- Spektrum DSM / DSM2 / DSM-X Satellite compatible input
- Futaba S.BUS compatible input and output
@@ -98,4 +94,4 @@ make thepeach_k1_default
## Where to buy
-Order from [ThePeach](http://thepeach.shop/)
+Order from [ThePeach](https://thepeach.shop/)
diff --git a/docs/zh/flight_controller/thepeach_r1.md b/docs/zh/flight_controller/thepeach_r1.md
index 5fec6a5de80..1be40738ba2 100644
--- a/docs/zh/flight_controller/thepeach_r1.md
+++ b/docs/zh/flight_controller/thepeach_r1.md
@@ -14,21 +14,17 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
## 产品规格
- Main Processor: STM32F427VIT6
-
- 32bit ARM Cortex-M4, 168 MHz 256 KB RAM 2 MB Flash memory
- IO Processor: STM32F100C8T6
-
- ARM Cortex-M3, 32bit ARM Cortex-M3, 24 MHz, 8KB SRAM
- On-board sensors
-
- 加速度计 / 陀螺仪:ICM-20602
- Accel/Gyro/Mag: MPU-9250
- 气压计:MS5611
- 接口
-
- 8+6 PWM output (8 from IO, 6 from FMU)
- Spektrum DSM / DSM2 / DSM-X Satellite compatible input
- Futaba S.BUS compatible input and output
@@ -42,7 +38,6 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
- Analog inputs for voltage / Current of 1 battery
- Interfaces For Raspberry Pi CM3+
-
- VBUS
- DDR2 Connector: Raspberry Pi CM3+
- 1x UART
@@ -103,4 +98,4 @@ make thepeach_r1_default
## Where to buy
-Order from [ThePeach](http://thepeach.shop/)
+Order from [ThePeach](https://thepeach.shop/)
diff --git a/docs/zh/flight_modes/offboard.md b/docs/zh/flight_modes/offboard.md
index 0d556ca4570..bf14082e859 100644
--- a/docs/zh/flight_modes/offboard.md
+++ b/docs/zh/flight_modes/offboard.md
@@ -85,9 +85,7 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### 旋翼机
- [px4_msgs::msg::TrajectorySetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/TrajectorySetpoint.msg)
-
- 支持以下输入组合:
-
- Position setpoint (`position` different from `NaN`). Non-`NaN` values of velocity and acceleration are used as feedforward terms for the inner loop controllers.
- Velocity setpoint (`velocity` different from `NaN` and `position` set to `NaN`). Non-`NaN` values acceleration are used as feedforward terms for the inner loop controllers.
- Acceleration setpoint (`acceleration` different from `NaN` and `position` and `velocity` set to `NaN`)
@@ -95,18 +93,14 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- 所有值都是基于NED(北, 东, 地)坐标系,位置、速度和加速的单位分别为\[m\], \[m/s\] 和\[m/s^2\] 。
- [px4_msgs::msg::VehicleAttitudeSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleAttitudeSetpoint.msg)
-
- 支持以下输入组合:
-
- quaternion `q_d` + thrust setpoint `thrust_body`.
Non-`NaN` values of `yaw_sp_move_rate` are used as feedforward terms expressed in Earth frame and in \[rad/s\].
- 姿态四元数表示无人机机体坐标系FRD(前、右、下) 与NED坐标系之间的旋转。 这个推力是在无人机体轴FRD坐标系下,并归一化为 \[-1, 1\] 。
- [px4_msgs::msg::VehicleRatesSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleRatesSetpoint.msg)
-
- 支持以下输入组合:
-
- `roll`, `pitch`, `yaw` and `thrust_body`.
- 所有值都表示在无人机体轴FRD坐标系下。 角速率(roll, pitch, yaw) 单位为\[rad/s\] ,thrust_body归一化为 \[-1, 1\]。
@@ -116,7 +110,6 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
下面的offboard控制模式会绕过所有PX4内部的控制环,应当非常谨慎地使用。
- [px4_msgs::msg::VehicleThrustSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleThrustSetpoint.msg) + [px4_msgs::msg::VehicleTorqueSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleTorqueSetpoint.msg)
-
- 支持以下输入组合:
- `xyz` for thrust and `xyz` for torque.
- 所有值都在无人机体轴 FRD 坐标系中表示,并且归一化为\[-1, 1\]。
@@ -134,9 +127,7 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### 直升机/垂直起降
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported:
-
- Position setpoint (only `x`, `y`, `z`)
- Velocity setpoint (only `vx`, `vy`, `vz`)
- Acceleration setpoint (only `afx`, `afy`, `afz`)
@@ -146,9 +137,7 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- PX4 supports the following `coordinate_frame` values (only): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported:
-
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
- Velocity setpoint (only `vx`, `vy`, `vz`)
@@ -172,11 +161,8 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### Fixed-wing
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported (via `type_mask`):
-
- Position setpoint (`x`, `y`, `z` only; velocity and acceleration setpoints are ignored).
-
- Specify the _type_ of the setpoint in `type_mask` (if these bits are not set the vehicle will fly in a flower-like pattern):
::: info
Some of the _setpoint type_ values below are not part of the MAVLink standard for the `type_mask` field.
@@ -196,11 +182,8 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- PX4 supports the coordinate frames (`coordinate_frame` field): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported (via `type_mask`):
-
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
-
- Specify the _type_ of the setpoint in `type_mask` (if these bits are not set the vehicle will fly in a flower-like pattern):
::: info
@@ -225,11 +208,8 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### 无人车
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported (in `type_mask`):
-
- Position setpoint (only `x`, `y`, `z`)
-
- Specify the _type_ of the setpoint in `type_mask`:
::: info
@@ -245,13 +225,11 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- PX4 supports the coordinate frames (`coordinate_frame` field): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported (in `type_mask`):
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
- Specify the _type_ of the setpoint in `type_mask` (not part of the MAVLink standard).
值为:
-
- 下面的比特位没有置位,是正常表现。
- 12288:悬停设定值(无人机足够接近设定值时会停止)。
@@ -279,7 +257,7 @@ _Offboard mode_ is affected by the following parameters:
## 开发者资源
-Typically developers do not directly work at the MAVLink layer, but instead use a robotics API like [MAVSDK](https://mavsdk.mavlink.io/) or [ROS](http://www.ros.org/) (these provide a developer friendly API, and take care of managing and maintaining connections, sending messages and monitoring responses - the minutiae of working with _Offboard mode_ and MAVLink).
+Typically developers do not directly work at the MAVLink layer, but instead use a robotics API like [MAVSDK](https://mavsdk.mavlink.io/) or [ROS](https://www.ros.org/) (these provide a developer friendly API, and take care of managing and maintaining connections, sending messages and monitoring responses - the minutiae of working with _Offboard mode_ and MAVLink).
以下资源可能对开发者有用:
diff --git a/docs/zh/frames_multicopter/dji_f450_cuav_5nano.md b/docs/zh/frames_multicopter/dji_f450_cuav_5nano.md
index 3d483c3527e..bc5a5d5837c 100644
--- a/docs/zh/frames_multicopter/dji_f450_cuav_5nano.md
+++ b/docs/zh/frames_multicopter/dji_f450_cuav_5nano.md
@@ -163,7 +163,7 @@ The final build is shown below:
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/zh/frames_multicopter/dji_f450_cuav_5plus.md b/docs/zh/frames_multicopter/dji_f450_cuav_5plus.md
index 2432987794d..8f2057d2ce0 100644
--- a/docs/zh/frames_multicopter/dji_f450_cuav_5plus.md
+++ b/docs/zh/frames_multicopter/dji_f450_cuav_5plus.md
@@ -166,7 +166,7 @@ The final build is shown below:
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/)
+[Download and install](https://qgroundcontrol.com/downloads/)
_QGroundControl_ for your platform.
:::tip
diff --git a/docs/zh/frames_multicopter/holybro_qav250_pixhawk4_mini.md b/docs/zh/frames_multicopter/holybro_qav250_pixhawk4_mini.md
index 4b8b96e2b3c..63b45528e5e 100644
--- a/docs/zh/frames_multicopter/holybro_qav250_pixhawk4_mini.md
+++ b/docs/zh/frames_multicopter/holybro_qav250_pixhawk4_mini.md
@@ -21,7 +21,7 @@ Key information
## Quickstart Guide
-[Pixhawk 4 Mini QAV250 Kit Quickstart Guide](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_qav250kit_quickstart_web.pdf)
+[Pixhawk 4 Mini QAV250 Kit Quickstart Guide](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_qav250kit_quickstart_web.pdf)
## Bill of materials
@@ -40,7 +40,7 @@ Additionally you will need a battery and receiver (+compatible transmitter).
This build uses:
- Receiver: [FrSSKY D4R-II](https://www.frsky-rc.com/product/d4r-ii/)
-- Battery: [4S 1300 mAh](http://www.getfpv.com/lumenier-1300mah-4s-60c-lipo-battery-xt60.html)
+- Battery: [4S 1300 mAh](https://www.getfpv.com/lumenier-1300mah-4s-60c-lipo-battery-xt60.html)
## 硬件
@@ -104,26 +104,37 @@ The following tools are used in this assembly:
1. Attach arms to the button plate with the 15mm screws as shown:

+
2. Put the short plate over the arms

+
3. Put the nuts on the 15mm screws (shown next step)
+
4. Insert the plastic screws into the indicated holes (note that this part of the frame faces down when the vehicle is complete).

+
5. Add the plastic nuts to the screws (turn over, as shown)

+
6. Lower the power module over the plastic screws and then add the plastics standoffs

+
7. Put the flight controller plate on the standoffs (over the power module)

+
8. Attach the motors. The motors have an arrow indicating the direction of rotation.

+
9. Use double sided tape from kit to attach the _Pixhawk 4 Mini_ to the flight controller plate.

+
10. Connect the power module's "power" cable to _Pixhawk 4 mini_.

+
11. Attach the aluminium standoffs to the button plate

+
12. Connect the Esc’s with the motors and hold. In this image shown the order of the motors and direction of the rotation.

@@ -135,19 +146,24 @@ The following tools are used in this assembly:
:::

+
13. Connect the signal ESC cables to the PWM outputs of the Pixhawk in the correct order (see previous image)

+
14. Connect the receiver.
- If using a PPM receiver connect to the PPM port.

+
- If using the SBUS receiver connect to the RC IN port

+
15. Connect the telemetry module. Paste the module with double tape and connect on the port of the telemetry.

+
16. Connect the GPS module

@@ -155,6 +171,7 @@ The following tools are used in this assembly:
Attach the module on the top plate (using provided 3M tape, or paste). Then put the top plate on the standoffs as shown

+
17. The last "mandatory" assembly step is to add the velcro to hold the battery

@@ -193,7 +210,7 @@ If you have to wire the system yourself, the diagram below shows all the connect
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the QAV250 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/zh/frames_multicopter/holybro_s500_v2_pixhawk4.md b/docs/zh/frames_multicopter/holybro_s500_v2_pixhawk4.md
index e0ef688fa48..80805b55930 100644
--- a/docs/zh/frames_multicopter/holybro_s500_v2_pixhawk4.md
+++ b/docs/zh/frames_multicopter/holybro_s500_v2_pixhawk4.md
@@ -268,7 +268,7 @@ Fully assembled, the kit looks as shown below:
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the QAV250 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/zh/frames_multicopter/holybro_x500V2_pixhawk5x.md b/docs/zh/frames_multicopter/holybro_x500V2_pixhawk5x.md
index 96dff21edd9..c55548083b7 100644
--- a/docs/zh/frames_multicopter/holybro_x500V2_pixhawk5x.md
+++ b/docs/zh/frames_multicopter/holybro_x500V2_pixhawk5x.md
@@ -196,7 +196,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/zh/frames_multicopter/holybro_x500_pixhawk4.md b/docs/zh/frames_multicopter/holybro_x500_pixhawk4.md
index 1c044b52d38..5306462cd4a 100644
--- a/docs/zh/frames_multicopter/holybro_x500_pixhawk4.md
+++ b/docs/zh/frames_multicopter/holybro_x500_pixhawk4.md
@@ -215,7 +215,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/zh/frames_multicopter/holybro_x500v2_pixhawk6c.md b/docs/zh/frames_multicopter/holybro_x500v2_pixhawk6c.md
index 4f7b61cebcf..83bd090fc6f 100644
--- a/docs/zh/frames_multicopter/holybro_x500v2_pixhawk6c.md
+++ b/docs/zh/frames_multicopter/holybro_x500v2_pixhawk6c.md
@@ -15,7 +15,7 @@ This topic provides full instructions for building the [Holybro X500 V2 ARF Kit]
### Payload and Battery Holder
-**Screw**- Sunk Screw M2.5\*6 12pcs
+**Screw**- Sunk Screw M2.5\*6 12pcs
1. Insert the hanger rubber ring gasket in each of their respective hangers.
Do not use sharp objects to press the rubbers inside.
@@ -135,6 +135,7 @@ The following parts can be placed as per usual.
[](https://youtu.be/aiFxVJFjlos)
This guide uses the GPS mount location suggested in Holybro’s guide.
+
2. Screw the GPS mount’s bottom end on the payload holder side using Locknut M3 & Screw M3\*10
[](https://youtu.be/uG5UKy3FrIc)
@@ -170,7 +171,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/zh/frames_multicopter/omnicopter.md b/docs/zh/frames_multicopter/omnicopter.md
index b92c2eaa629..7d12e1a14c4 100644
--- a/docs/zh/frames_multicopter/omnicopter.md
+++ b/docs/zh/frames_multicopter/omnicopter.md
@@ -41,7 +41,7 @@ The components needed for this build are:
- rods: 12x328mm, 6x465mm
- Screws:
- Motors and standoffs: 40x M3x12mm
- - FC mount: 4x M3x35mm, 4x M3 nuts
+ - FC mount: 4x M3x35mm, 4x M3 nuts
- Standoffs: 4x 40mm
- [3D model](https://cad.onshape.com/documents/eaff30985f1298dc6ce8ce13/w/2f662e604240c4082682e5e3/e/ad2b2245b73393cf369132f7)
@@ -57,10 +57,13 @@ The components needed for this build are:
You will notice if it's wrong when the angles of the rods are not correct.
:::
+
- Cut the rods
+
- Test that it all works by connecting the frame pieces together:

+
- Place the motors as far out as possible, without the propellers touching the rods.
### Electronics
@@ -117,7 +120,7 @@ Make sure the motors do not overheat with the changed settings.
- Parameters:
- Change the desaturation logic for better attitude tracking: set [CA_METHOD](../advanced_config/parameter_reference.md#CA_METHOD) to 0.
- Disable failure detection: set [FD_FAIL_P](../advanced_config/parameter_reference.md#FD_FAIL_P) and [FD_FAIL_R](../advanced_config/parameter_reference.md#FD_FAIL_R) to 0.
-- [This file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/multicopter/omnicopter/omnicopter.params) contains all the relevant parameters.
+- [This file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/multicopter/omnicopter/omnicopter.params) contains all the relevant parameters.
## 视频
diff --git a/docs/zh/frames_multicopter/qav_r_5_kiss_esc_racer.md b/docs/zh/frames_multicopter/qav_r_5_kiss_esc_racer.md
index c94a48d5ce7..b7587e0b557 100644
--- a/docs/zh/frames_multicopter/qav_r_5_kiss_esc_racer.md
+++ b/docs/zh/frames_multicopter/qav_r_5_kiss_esc_racer.md
@@ -6,7 +6,7 @@ It also provides information on the (optional) FPV setup.
Key information:
-- **Frame:** [Lumenier QAV-R 5"](http://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
+- **Frame:** [Lumenier QAV-R 5"](https://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
- **Flight controller:** [Pixracer](../flight_controller/pixracer.md)
@@ -18,24 +18,24 @@ Key information:
### Vehicle (needed for flying)
-- Autopilot: [Pixracer](../flight_controller/pixracer.md) from [AUAV](https://store.mrobotics.io/mRo-PixRacer-R14-Official-p/auav-pxrcr-r14-mr.htm) including ESP8266 WiFi- and [ACSP5](https://store.mrobotics.io/product-p/auav-acsp5-mr.htm) power-module
-- Frame: [Lumenier QAV-R 5"](http://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
-- Motors: [Lumenier RX2206-11 2350KV](http://www.getfpv.com/lumenier-rx2206-11-2350kv-motor.html)
-- ESCs: [KISS 24A Race Edition](http://www.getfpv.com/kiss-24a-esc-race-edition-32bit-brushless-motor-ctrl.html)
-- Props: HQProp 5x4.5x3 [CW](http://www.getfpv.com/hqprop-5x4-5x3rg-cw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html) [CCW](http://www.getfpv.com/hqprop-5x4-5x3g-ccw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html)
+- Autopilot: [Pixracer](../flight_controller/pixracer.md) from [AUAV](https://store.mrobotics.io/mRo-PixRacer-R14-Official-p/auav-pxrcr-r14-mr.htm) including ESP8266 WiFi- and [ACSP5](https://store.mrobotics.io/product-p/auav-acsp5-mr.htm) power-module
+- Frame: [Lumenier QAV-R 5"](https://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
+- Motors: [Lumenier RX2206-11 2350KV](https://www.getfpv.com/lumenier-rx2206-11-2350kv-motor.html)
+- ESCs: [KISS 24A Race Edition](https://www.getfpv.com/kiss-24a-esc-race-edition-32bit-brushless-motor-ctrl.html)
+- Props: HQProp 5x4.5x3 [CW](https://www.getfpv.com/hqprop-5x4-5x3rg-cw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html) [CCW](https://www.getfpv.com/hqprop-5x4-5x3g-ccw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html)
- GPS / Ext. Mag.: M8N taken from a [Pixhawk Mini (Discontinued)](../flight_controller/pixhawk_mini.md) set and rewired
-- Battery: [TATTU 1800mAh 4s 75c Lipo](http://www.getfpv.com/tattu-1800mah-4s-75c-lipo-battery.html)
-- RC Receiver: [FrSky X4R-SB](http://www.getfpv.com/frsky-x4r-sb-3-16-channel-receiver-w-sbus.html)
-- RC Transmitter: [FrSky Taranis](http://www.getfpv.com/frsky-taranis-x9d-plus-2-4ghz-accst-radio-w-soft-case-mode-2.html)
-- FC dampening: [O-Rings](http://www.getfpv.com/multipurpose-o-ring-set-of-8.html)
-- GPS Mount: [GPS mast](http://www.getfpv.com/folding-aluminum-gps-mast-for-dji.html)
+- Battery: [TATTU 1800mAh 4s 75c Lipo](https://www.getfpv.com/tattu-1800mah-4s-75c-lipo-battery.html)
+- RC Receiver: [FrSky X4R-SB](https://www.getfpv.com/frsky-x4r-sb-3-16-channel-receiver-w-sbus.html)
+- RC Transmitter: [FrSky Taranis](https://www.getfpv.com/frsky-taranis-x9d-plus-2-4ghz-accst-radio-w-soft-case-mode-2.html)
+- FC dampening: [O-Rings](https://www.getfpv.com/multipurpose-o-ring-set-of-8.html)
+- GPS Mount: [GPS mast](https://www.getfpv.com/folding-aluminum-gps-mast-for-dji.html)
### FPV (optional)
- Camera: [RunCam Swift RR Edition](https://www.getfpv.com/runcam-swift-rotor-riot-special-edition-ir-block-black.html) **includes must-have high quality wide angle lens from GoPro!**
- Video Tx: [ImmersionRC Tramp HV 5.8GHz 600mW](https://www.getfpv.com/immersionrc-tramp-hv-5-8ghz-video-tx-us-version.html) (Discontinued).
-- Video Antennas: [TBS Triumph 5.8GHz CP](http://www.getfpv.com/fpv/antennas/tbs-triumph-5-8ghz-cp-fpv-antenna-3275.html) (SMA port fits ImmercionRC Tx)
-- FPV voltage source plug: [Male JST Battery Pigtail](http://www.getfpv.com/male-jst-battery-pigtail-10cm-10pcs-bag.html)
+- Video Antennas: [TBS Triumph 5.8GHz CP](https://www.getfpv.com/fpv/antennas/tbs-triumph-5-8ghz-cp-fpv-antenna-3275.html) (SMA port fits ImmercionRC Tx)
+- FPV voltage source plug: [Male JST Battery Pigtail](https://www.getfpv.com/male-jst-battery-pigtail-10cm-10pcs-bag.html)
:::info
These parts cover the sending side for standard FPV 5.8GHz analog FM video. You need to have a compatible receiver and display device to actually consume the live video stream.
@@ -204,7 +204,7 @@ You'll need the additional FPV parts listed at the beginning.
The FPV transmission described here is electronically independent of the flight controller, it only takes the battery voltage after the power module.
I first did a bench test to make sure everything is working correctly.
-For this connect the video signal cable that comes with your transmitter and plug it to the back of your FPV camera and to the matching plug of the transmitter. Screw the Then connect the JST power plug to your draft vehicle or to some other voltage source.
+For this connect the video signal cable that comes with your transmitter and plug it to the back of your FPV camera and to the matching plug of the transmitter. Screw the Then connect the JST power plug to your draft vehicle or to some other voltage source.
The transmitter LED should light up.
Use your 5.8GHz receiver device tuned in to the correct channel to check for the video.
To configure the transmitter to an other channel and adjust the transmission power please refer to the [Tramp HV User Manual](https://www.immersionrc.com/?download=5016).
@@ -225,7 +225,7 @@ I mounted it like you can see in the next picture. The two screws and nuts to lo
## PX4 配置
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/zh/frames_plane/reptile_dragon_2.md b/docs/zh/frames_plane/reptile_dragon_2.md
index abd7c2bb4d6..1a26d29c990 100644
--- a/docs/zh/frames_plane/reptile_dragon_2.md
+++ b/docs/zh/frames_plane/reptile_dragon_2.md
@@ -62,19 +62,19 @@ Key build features
- [DJI FPV Goggles](https://www.dji.com/fpv)
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24)
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24)
- [5V BEC](https://www.readymaderc.com/products/details/rmrc-3a-power-regulator-5-to-6-volt-ubec)
- [6s2p 18650 LiIon flight battery](https://www.upgradeenergytech.com/product-page/6s-22-2v-5600mah-30c-dark-lithium-liion-drone-battery) (select XT60 connector)
-- [Custom designed 3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/rd2_3d_printed_parts.zip)
+- [Custom designed 3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/rd2_3d_printed_parts.zip)
- ARK6X carrier mount
- Holybro Pixhawk 5x carrier mount
- FPV pod and camera mount
- Pitot static probe "plug" adapter
-- [Custom designed power distribution PCB](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/xt30_power_distro_pcb.zip)
+- [Custom designed power distribution PCB](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/xt30_power_distro_pcb.zip)
- Misc hardware: M3 hardware (standoffs, washers, O-rings, bolts), M2.5 nylon standoffs and screws, XT30 connectors, hot glue, heatshrink, Molex Microfit connectors
@@ -377,7 +377,7 @@ make ark_fmu-v6x_default upload
This param file contains the custom PX4 parameter configuration for this build, including radio setup, tuning and sensor config.
Load the file via QGC using the instructions at [Parameters> Tools](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/parameters.html#tools) (QGC User Guide).
-- [Snapshot of PX4 airframe params](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/reptile_dragon_2_params.params)
+- [Snapshot of PX4 airframe params](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/reptile_dragon_2_params.params)
You may need to modify some parameters for your build
In particular you should check:
diff --git a/docs/zh/frames_plane/turbo_timber_evolution.md b/docs/zh/frames_plane/turbo_timber_evolution.md
index b6d0a52d1f7..ca27b9400aa 100644
--- a/docs/zh/frames_plane/turbo_timber_evolution.md
+++ b/docs/zh/frames_plane/turbo_timber_evolution.md
@@ -54,9 +54,9 @@ Key Build Features:
- [DJI FPV Goggles](https://www.dji.com/fpv)
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24)
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24)
-- [Custom designed 3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip)
+- [Custom designed 3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip)
- Pixhawk 4 Mini mount and top GPS mount
- FPV pod and camera mount
- Pitot static pod and wing hardpoint hanger
@@ -117,7 +117,7 @@ After the first flight, the lid was hot glued in place.
## Flight Computer Installation
-A custom mount for the PX4 Mini was designed and 3d printed (see [3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip) for all parts).
+A custom mount for the PX4 Mini was designed and 3d printed (see [3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip) for all parts).
This mount was carefully designed to use internal foam mold features of the stock TTE airframe to be securely attached and well aligned.
The mount consists of two parts in a double-decker configuration, bolted together with M3 threaded standoffs.
The bottom mount carries the Pixhawk and attaches to the airframe while the top mount carries the GPS and ExpressLRS RX.
@@ -238,7 +238,7 @@ I use full flaps on landing to slow the otherwise slippery airframe.
### Parameter File
-[Snapshot of PX4 airframe params](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/tteparams.params)
+[Snapshot of PX4 airframe params](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/tteparams.params)
This param file contains the custom PX4 parameter config for this build, including radio setup, tuning and sensor config.
The param file can be loaded via QGC using the instructions at [Parameters> Tools ](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/parameters.html#tools) (QGC User Guide).
diff --git a/docs/zh/frames_rover/rover_position_control.md b/docs/zh/frames_rover/rover_position_control.md
index 7208306b674..1b584f41813 100644
--- a/docs/zh/frames_rover/rover_position_control.md
+++ b/docs/zh/frames_rover/rover_position_control.md
@@ -110,8 +110,8 @@ The idea was to develop a platform that allows for easy control of wheeled UGVs
- [Pixhawk Mini (Discontinued)](../flight_controller/pixhawk_mini.md)
- 3DR 10S Power Module
- 3DR 433MHz Telemetry Module (EU)
-- [Spektrum Dxe Controller](http://www.spektrumrc.com/Products/Default.aspx?ProdId=SPM1000) or other PX4-compatible remotes
-- [Spektrum Quad Race Serial Receiver w/Diversity](http://www.spektrumrc.com/Products/Default.aspx?ProdID=SPM4648)
+- [Spektrum Dxe Controller](https://www.spektrumrc.com/product/dxe-dsmx-transmitter-with-ar610/SPM1000.html) or other PX4-compatible remotes
+- [Spektrum Quad Race Serial Receiver w/Diversity](https://www.spektrumrc.com/product/dsmx-quad-race-serial-receiver-with-diversity/SPM4648.html)
- [PX4Flow](../sensor/px4flow.md) (Deprecated)
### 组装
@@ -133,7 +133,7 @@ Tests showed that a better vibration insulation should be used, especially for t
For this particular mounting we chose to use the clip supplied with the rover to attach the upper plate.
For this, two supports were 3D printed.
-The CAD files are provided [here](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/rover/traxxas_stampede_vxl/plane_holders.zip).
+The CAD files are provided [here](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/rover/traxxas_stampede_vxl/plane_holders.zip).
:::warning
It is **HIGHLY RECOMMENDED** to set the ESC in training mode (see Traxxas Stampede Manual), which reduces power to 50%.
diff --git a/docs/zh/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md b/docs/zh/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
index 6f62eb6cc27..57e43f901d2 100644
--- a/docs/zh/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
+++ b/docs/zh/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
@@ -28,9 +28,9 @@ Almost everything you need is provided in the RTF kit (the links next to compone
- GPS u-blox M8N
- Power Sensor
- [Airspeed Sensor](https://store-drotek.com/793-digital-differential-airspeed-sensor-kit-.html)
-- Quad power set [Tiger Motor MT-2216-11 900kv V2](https://www.getfpv.com/tiger-motor-mt-2216-11-900kv-v2.html) (discontinued)
+- Quad power set [Tiger Motor MT-2216-11 900kv V2](https://www.getfpv.com/tiger-motor-mt-2216-11-900kv-v2.html) (discontinued)
- 4 x propeller 10”x 5” (quad motors)
-- 4 x [ESC 25A](http://www.getfpv.com/tiger-motor-flame-25a-esc.html)
+- 4 x [ESC 25A](https://www.getfpv.com/tiger-motor-flame-25a-esc.html)
- 1 x propeller 10” x 5” (pusher motor)
- 1 x ESC 30A
- Pusher motor power system
@@ -142,11 +142,11 @@ For example, you might wire it up like this example (orientation as if "sitting
| MAIN 2 | Back left motor, CCW |
| MAIN 3 | Front left motor, CW |
| MAIN 4 | Back right motor, CW |
-| AUX 1 | Left aileron |
-| AUX 2 | Right aileron |
-| AUX 3 | Elevator |
-| AUX 4 | Rudder |
-| AUX 5 | 油门 |
+| AUX 1 | Left aileron |
+| AUX 2 | Right aileron |
+| AUX 3 | Elevator |
+| AUX 4 | Rudder |
+| AUX 5 | 油门 |
@@ -255,7 +255,6 @@ The final assembly step is to check the vehicle is stable and that the motors ha
:::
2. Check the vehicle is balanced around the expected centre of gravity
-
- Hold the vehicle with your fingers at the center of gravity and check that the vehicle remains stable.

diff --git a/docs/zh/frames_vtol/vtol_quadplane_foxtech_loong_2160.md b/docs/zh/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
index a074cc2e8f3..a91e28133ba 100644
--- a/docs/zh/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
+++ b/docs/zh/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
@@ -51,7 +51,7 @@ The following options have been tested:
- [Groundstation and Radio link](https://holybro.com/collections/rc-radio-transmitter-receiver/products/skydroid-h12?variant=42940989931709)
- [USB-C extension cable](https://www.digitec.ch/en/s1/product/powerguard-usb-c-usb-c-025-m-usb-cables-22529949?dbq=1&gclid=Cj0KCQjw2cWgBhDYARIsALggUhrh-z-7DSU0wKfLBVa8filkXLQaxUpi7pC0ffQyRzLng8Ph01h2R1gaAp0mEALw_wcB&gclsrc=aw.ds)
- [I2C Splitter](https://www.3dxr.co.uk/autopilots-c2/the-cube-aka-pixhawk-2-1-c9/cube-cables-accessories-sensors-c15/cubepilot-i2c-can-splitter-jst-gh-4pin-p2840)
-- [3D-Printed mounts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong-3d-prints.zip)
+- [3D-Printed mounts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong-3d-prints.zip)
- 1x Baseplate
- 1x Stack-fixture
- 1x Fan-Mount
@@ -291,12 +291,12 @@ If you wish connect the actuators to different outputs you will need to modify t
### Load Parameters File
-Next we load a [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
+Next we load a [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
If you have followed the wiring instructions for the motors you probably won't need to do much further configuration other than sensor calibration and fixing the trims.
To load the file:
-1. Download the [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong.params).
+1. Download the [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong.params).
2. Select the [Parameters](../advanced_config/parameters.md#finding-updating-parameters) tab and then click on **Tools** in the top right corner.
3. Select **Load from file** and then choose the `loong.params` file you just downloaded.
4. Reboot the vehicle.
diff --git a/docs/zh/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md b/docs/zh/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
index ba91a5ea522..36d4c03e762 100644
--- a/docs/zh/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
+++ b/docs/zh/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
@@ -13,7 +13,7 @@ A number of other components have been updated in the parts list too.
## 配件列表
- TBS Caipirinha Wing (no longer available - try [TBS Caipirinha 2](https://team-blacksheep.com/products/prod:tbs_caipi2_pnp))
-- Left and right 3D-printed motor mount (design files)
+- Left and right 3D-printed motor mount (design files)
- CW 8045 propeller ([Eflight store](https://www.banggood.com/GEMFAN-Carbon-Nylon-8045-CWCCW-Propeller-For-Quadcopters-1-Pair-p-950874.html))
- CCW 8045 propeller ([Eflight store](https://www.banggood.com/GEMFAN-Carbon-Nylon-8045-CWCCW-Propeller-For-Quadcopters-1-Pair-p-950874.html))
- 2 x 1800kv 120-180W电机
diff --git a/docs/zh/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md b/docs/zh/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
index b5c4bad3283..2a96f0965e8 100644
--- a/docs/zh/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
+++ b/docs/zh/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
@@ -47,12 +47,12 @@ The approximate maximum size of the FC is: 50x110x22mm
- [Airspeed sensor (cheaper alternative)](https://holybro.com/products/digital-air-speed-sensor?pr_prod_strat=use_description&pr_rec_id=236dfda00&pr_rec_pid=7150470561981&pr_ref_pid=7150472462525&pr_seq=uniform)
- [Lidar Lightware lw20-c (included in Skynode eval. kit)](../sensor/sfxx_lidar.md) (Optional)
- [Lidar Seeed Studio PSK-CM8JL65-CC5 (cheaper alternative)](https://www.seeedstudio.com/PSK-CM8JL65-CC5-Infrared-Distance-Measuring-Sensor-p-4028.html) (Optional)
-- [5V BEC](http://www.mateksys.com/?portfolio=bec12s-pro)
+- [5V BEC](https://www.mateksys.com/?portfolio=bec12s-pro)
- [Radio (RC) System](../getting_started/rc_transmitter_receiver.md) of your preference
- [Servo cable extension cable male 30cm 10 pcs](https://www.getfpv.com/male-to-male-servo-extension-cable-twisted-22awg-jr-style-5-pcs.html)
- [USB-C extension cable](https://www.digitec.ch/en/s1/product/powerguard-usb-c-usb-c-025-m-usb-cables-22529949?dbq=1&gclid=Cj0KCQjw2cWgBhDYARIsALggUhrh-z-7DSU0wKfLBVa8filkXLQaxUpi7pC0ffQyRzLng8Ph01h2R1gaAp0mEALw_wcB&gclsrc=aw.ds)
- [3M VHB tape](https://www.amazon.in/3M-VHB-Tape-4910-Length/dp/B00GTABM3Y)
-- [3D-Printed mounts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo_3d_prints.zip)
+- [3D-Printed mounts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo_3d_prints.zip)
- 2x wing connector mount
- 1x Airspeed sensor mount
- 1x GPS-Mount
@@ -159,7 +159,6 @@ The connector glued into the fuselage. Make sure to properly align the connector
If you own a crimp tool, then you can also directly add the connectors without soldering.
2. Plug the servo cables into the adapter IO board in the following order:
-
- 1 - Aileron left
- 2 - Aileron right
- 3 - V-Tail left
@@ -168,7 +167,6 @@ The connector glued into the fuselage. Make sure to properly align the connector
- 6 - Tilt right
3. Plug in the motor signal cables into the FMU adapter board in the following order:
-
- 1 - Front left
- 2 - Front right
- 3 - Rear
@@ -281,12 +279,12 @@ An inexpensive example would be a [SiK Telemetry Radio](../telemetry/sik_radio.m
### Load Parameters File
-Next we load a [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
+Next we load a [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
If you have followed the wiring instructions for the motors you probably won't need to do much further configuration other than sensor calibration and fixing the trims.
To load the file:
-1. Download the [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params).
+1. Download the [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params).
2. Select the [Parameters](../advanced_config/parameters.md#finding-updating-parameters) tab and then click on **Tools** in the top right corner.
3. Select **Load from file** and then choose the `omp_hobby_zmo.params` file you just downloaded.
4. Reboot the vehicle.
diff --git a/docs/zh/getting_started/flight_reporting.md b/docs/zh/getting_started/flight_reporting.md
index fcdf932ed61..366d304db87 100644
--- a/docs/zh/getting_started/flight_reporting.md
+++ b/docs/zh/getting_started/flight_reporting.md
@@ -9,7 +9,7 @@ Keeping flight logs is a legal requirement in some jurisdictions.
## 从飞行控制器下载日志
-Logs can be downloaded using [QGroundControl](http://qgroundcontrol.com/): **[Analyze View > Log Download](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/analyze_view/log_download.html)**.
+Logs can be downloaded using [QGroundControl](https://qgroundcontrol.com/): **[Analyze View > Log Download](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/analyze_view/log_download.html)**.

@@ -21,7 +21,7 @@ You can also host a [private Flight Review server](../dev_log/log_encryption.md#
## 分析日志
-Upload the log file to the online [Flight Review](http://logs.px4.io) tool.
+Upload the log file to the online [Flight Review](https://logs.px4.io/) tool.
After upload you'll be emailed a link to the analysis page for the log.
[Log Analysis using Flight Review](../log/flight_review.md) explains how to interpret the plots, and can help you to verify/reject the causes of common problems: excessive vibration, poor PID tuning, saturated controllers, imbalanced vehicles, GPS noise, etc.
@@ -38,17 +38,17 @@ For more information see [Settings > MAVLink Settings > MAVLink 2 Logging (PX4 o
## 给 PX4 开发人员共享日志文件
-The [Flight Review](http://logs.px4.io) log file link can be shared for discussion in the [support forums](../contribute/support.md#forums-and-chat) or a [Github issue](../index.md#reporting-bugs-issues).
+The [Flight Review](https://logs.px4.io/) log file link can be shared for discussion in the [support forums](../contribute/support.md#forums-and-chat) or a [Github issue](../index.md#reporting-bugs-issues).
## Log Configuration
-The logging system is configured by default to collect sensible logs for use with [Flight Review](http://logs.px4.io).
+The logging system is configured by default to collect sensible logs for use with [Flight Review](https://logs.px4.io/).
Logging may further be configured using the [SD Logging](../advanced_config/parameter_reference.md#sd-logging) parameters or with a file on the SD card.
Details on configuration can be found in the [logging configuration documentation](../dev_log/logging.md#configuration).
## 主链接
-- [Flight Review](http://logs.px4.io)
+- [Flight Review](https://logs.px4.io/)
- [Log Analysis using Flight Review](../log/flight_review.md)
- [Flight Log Analysis](../dev_log/flight_log_analysis.md)
diff --git a/docs/zh/getting_started/px4_basic_concepts.md b/docs/zh/getting_started/px4_basic_concepts.md
index ad37898f708..ba5e69333af 100644
--- a/docs/zh/getting_started/px4_basic_concepts.md
+++ b/docs/zh/getting_started/px4_basic_concepts.md
@@ -62,9 +62,9 @@ PX4的一些主要功能包括:
- Supports many different vehicle frames/types, including: [multicopters](../frames_multicopter/index.md), [fixed-wing aircraft](../frames_plane/index.md) (planes), [VTOLs](../frames_vtol/index.md) (hybrid multicopter/fixed-wing), [ground vehicles](../frames_rover/index.md), and [underwater vehicles](../frames_sub/index.md).
- Great choice of drone components for [flight controller](#flight-controller), [sensors](#sensors), [payloads](#payloads), and other peripherals.
- Flexible and powerful [flight modes](#flight-modes) and [safety features](#safety-settings-failsafe).
-- Robust and deep integration with [companion computers](#offboard-companion-computer) and [robotics APIs](../robotics/index.md) such as [ROS 2](../ros2/user_guide.md) and [MAVSDK](http://mavsdk.mavlink.io).
+- Robust and deep integration with [companion computers](#offboard-companion-computer) and [robotics APIs](../robotics/index.md) such as [ROS 2](../ros2/user_guide.md) and [MAVSDK](https://mavsdk.mavlink.io/main/en/index.html).
-PX4 is a core part of a broader drone platform that includes the [QGroundControl](#qgc) ground station, [Pixhawk hardware](https://pixhawk.org/), and [MAVSDK](http://mavsdk.mavlink.io) for integration with companion computers, cameras and other hardware using the MAVLink protocol.
+PX4 is a core part of a broader drone platform that includes the [QGroundControl](#qgc) ground station, [Pixhawk hardware](https://pixhawk.org/), and [MAVSDK](https://mavsdk.mavlink.io/main/en/index.html) for integration with companion computers, cameras and other hardware using the MAVLink protocol.
PX4 is supported by the [Dronecode Project](https://www.dronecode.org/).
## Ground Control Stations
@@ -74,9 +74,9 @@ A subset of the products that are known to work with PX4 are listed below.
### QGroundControl {#qgc}
-The Dronecode GCS software is called [QGroundControl](http://qgroundcontrol.com/) ("QGC").
+The Dronecode GCS software is called [QGroundControl](https://qgroundcontrol.com/) ("QGC").
It runs on Windows, Android, MacOS or Linux hardware, and supports a wide range of screen form factors.
-You can download it (for free) from [here](http://qgroundcontrol.com/downloads/).
+You can download it (for free) from [here](https://qgroundcontrol.com/downloads/).

diff --git a/docs/zh/getting_started/rc_transmitter_receiver.md b/docs/zh/getting_started/rc_transmitter_receiver.md
index e79610dc57a..dd2792504c5 100644
--- a/docs/zh/getting_started/rc_transmitter_receiver.md
+++ b/docs/zh/getting_started/rc_transmitter_receiver.md
@@ -98,7 +98,6 @@ _PX4_ and _Pixhawk_ have been validated with:
- PPM sum receivers
- S.BUS and S.BUS2 receivers from:
-
- Futaba
- FrSky S.BUS and PPM models
- TBS Crossfire with SBUS as output protocol
@@ -130,7 +129,7 @@ The receivers we have tested all now appear to be compatible, but it is possible
- Graupner HoTT receivers: SUMD output must connect to a **SPKT/DSM** input (as above).
- PPM-Sum and S.BUS receivers must connect directly to the **RC** ground, power and signal pins.
This is typically labeled: `RC IN`, `RCIN` or `RC`, but has in some FCs has been labeled `PPM RC` or `PPM`.
-- PPM receivers that have an individual wire for each channel must connect to the RCIN channel _via_ a PPM encoder [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM receivers that have an individual wire for each channel must connect to the RCIN channel _via_ a PPM encoder [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
- TBS Crossfire/Express LRS Receivers using [CRSF Telemetry](../telemetry/crsf_telemetry.md) connect via a spare UART.
Flight controllers usually include appropriate cables for connecting common receiver types.
diff --git a/docs/zh/gps_compass/gps_hex_here2.md b/docs/zh/gps_compass/gps_hex_here2.md
index 77b981dcbb2..efd6a370258 100644
--- a/docs/zh/gps_compass/gps_hex_here2.md
+++ b/docs/zh/gps_compass/gps_hex_here2.md
@@ -4,7 +4,7 @@
This has been superseded by the [Cube Here 3](https://www.cubepilot.com/#/here/here3)
:::
-The [Here2 GPS receiver](http://www.proficnc.com/all-products/152-gps-module.html) is an update to the Here GPS module from HEX.
+The _Here2 GPS receiver_ is an update to the Here GPS module from HEX.
Main features include:
@@ -18,8 +18,7 @@ Main features include:
## 购买渠道
-- [ProfiCNC](http://www.proficnc.com/all-products/152-gps-module.html) (Australia)
-- [Other resellers](http://www.proficnc.com/stores)
+- [Resellers](https://www.cubepilot.com/#/reseller/list)
## 配置
@@ -34,7 +33,7 @@ Setup and use on PX4 is largely plug and play.
## 接线和连接
-The Here2 GPS comes with an 8 pin connector that can be inserted directly into the [Pixhawk 2](http://www.hex.aero/wp-content/uploads/2016/07/DRS_Pixhawk-2-17th-march-2016.pdf) GPS UART port.
+The Here2 GPS comes with an 8 pin connector that can be inserted directly into the Pixhawk 2 `GPS` UART port.
The Pixhawk 3 Pro and Pixracer have a 6 pin GPS port connector.
For these controllers you can modify the GPS cable (as shown below) to remove pin 6 and 7.
diff --git a/docs/zh/gps_compass/index.md b/docs/zh/gps_compass/index.md
index 3e0aeba21d1..d4d5a030bd4 100644
--- a/docs/zh/gps_compass/index.md
+++ b/docs/zh/gps_compass/index.md
@@ -47,7 +47,7 @@ PX4 also supports [Real Time Kinematic (RTK)](../gps_compass/rtk_gps.md) and **P
| [mRo GPS u-blox Neo-M8N Dual Compass][mro_neo8mn_dual_mag] | M8N | LIS3MDL, IST8308 | | ✘ | |
| [RaccoonLab L1 GNSS NEO-M8N][RccnLabGNSS250] | NEO-M8N | RM3100 | ✓ | ✘✘✓ | + Baro |
| [Sky-Drones SmartAP GPS](../gps_compass/gps_smartap.md) | M8N | HMC5983, IST8310, LIS3MDL | | ✓ | + Baro |
-| [Zubax GNSS 2](https://zubax.com/products/gnss_2) | MAX-M8Q | LIS3MDL | | ✘ | + Baro |
+| [Zubax GNSS 2](https://shop.zubax.com/products/zubax-gnss-2) | MAX-M8Q | LIS3MDL | | ✘ | + Baro |
@@ -145,7 +145,6 @@ To ensure the port is set up correctly perform a [Serial Port Configuration](../
The following steps show how to configure a secondary GPS on the `GPS 2` port in _QGroundControl_:
1. [Find and set](../advanced_config/parameters.md) the parameter [GPS_2_CONFIG](../advanced_config/parameter_reference.md#GPS_2_CONFIG) to **GPS 2**.
-
- Open _QGroundControl_ and navigate to the **Vehicle Setup > Parameters** section.
- Select the **GPS** tab, then open the [GPS_2_CONFIG](../advanced_config/parameter_reference.md#GPS_2_CONFIG) parameter and select `GPS 2` from the dropdown list.
diff --git a/docs/zh/gps_compass/rtk_gps.md b/docs/zh/gps_compass/rtk_gps.md
index 453c04eaa87..ced94901674 100644
--- a/docs/zh/gps_compass/rtk_gps.md
+++ b/docs/zh/gps_compass/rtk_gps.md
@@ -14,46 +14,47 @@ Some RTK GNSS setups can provide yaw/heading information, as an alternative to t
## 支持的 RTK 设备
-PX4 supports the [u-blox M8P](https://www.u-blox.com/en/product/neo-m8p), [u-blox F9P](https://www.u-blox.com/en/product/zed-f9p-module) and the [Trimble MB-Two](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) GPS, and products that incorporate them.
+PX4 supports the [u-blox M8P](https://www.u-blox.com/en/product/neo-m8p), [u-blox F9P](https://www.u-blox.com/en/product/zed-f9p-module) and the [Trimble MB-Two](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) GPS, and products that incorporate them.
The RTK compatible devices below that are expected to work with PX4 (it omits discontined devices).
The table indicates devices that also output yaw, and that can provide yaw when two on-vehicle units are used.
It also highlights devices that connect via the CAN bus, and those which support PPK (Post-Processing Kinematic).
-| 设备 | GPS | 罗盘 | [DroneCAN](../dronecan/index.md) | [GPS Yaw](#configuring-gps-as-yaw-heading-source) | PPK |
-| :------------------------------------------------------------------------------------------------------------------- | :------------------: | :-------------------------: | :------------------------------: | :-----------------------------------------------: | :-------------------------: |
-| [ARK RTK GPS](../dronecan/ark_rtk_gps.md) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
-| [ARK MOSAIC-X5 RTK GPS](../dronecan/ark_mosaic__rtk_gps.md) | Mosaic-X5 | IIS2MDC | ✓ | [Septentrio Dual Antenna][SeptDualAnt] | |
-| [CUAV C-RTK GPS](../gps_compass/rtk_gps_cuav_c-rtk.md) | M8P/M8N | ✓ | | | |
-| [CUAV C-RTK2](../gps_compass/rtk_gps_cuav_c-rtk2.md) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [CUAV C-RTK 9Ps GPS](../gps_compass/rtk_gps_cuav_c-rtk-9ps.md) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [CUAV C-RTK2 PPK/RTK GNSS](../gps_compass/rtk_gps_cuav_c-rtk.md) | F9P | RM3100 | | | ✓ |
-| [CubePilot Here+ RTK GPS](../gps_compass/rtk_gps_hex_hereplus.md) | M8P | HMC5983 | | | |
-| [CubePilot Here3 CAN GNSS GPS (M8N)](https://www.cubepilot.org/#/here/here3) | M8P | ICM20948 | ✓ | | |
-| [Drotek SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [DATAGNSS GEM1305 RTK Receiver][DATAGNSS GEM1305 RTK] | TAU951M | ✘ | | ✘ | |
-| [Femtones MINI2 Receiver](../gps_compass/rtk_gps_fem_mini2.md) | FB672, FB6A0 | ✓ | | | |
-| [Freefly RTK GPS](../gps_compass/rtk_gps_freefly.md) | F9P | IST8310 | | | |
-| [Holybro H-RTK ZED-F9P RTK Rover (DroneCAN variant)](../dronecan/holybro_h_rtk_zed_f9p_gps.md) | F9P | RM3100 | ✓ | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK ZED-F9P RTK Rover](https://holybro.com/collections/h-rtk-gps/products/h-rtk-zed-f9p-rover) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Ultralight](https://holybro.com/products/h-rtk-f9p-ultralight) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Helical or Base](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
-| [Holybro DroneCAN H-RTK F9P Helical](https://holybro.com/products/dronecan-h-rtk-f9p-helical) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Rover Lite](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | | |
-| [Holybro DroneCAN H-RTK F9P Rover](https://holybro.com/products/dronecan-h-rtk-f9p-rover) | F9P | BMM150 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK M8P GNSS](../gps_compass/rtk_gps_holybro_h-rtk-m8p.md) | M8P | IST8310 | | | |
-| [Holybro H-RTK Unicore UM982 GPS](../gps_compass/rtk_gps_holybro_unicore_um982.md) | UM982 | IST8310 | | [Unicore Dual Antenna][UnicoreDualAnt] | |
-| [LOCOSYS Hawk R1](../gps_compass/rtk_gps_locosys_r1.md) | MC-1612-V2b | | | | |
-| [LOCOSYS Hawk R2](../gps_compass/rtk_gps_locosys_r2.md) | MC-1612-V2b | IST8310 | | | |
-| [mRo u-blox ZED-F9 RTK L1/L2 GPS](https://store.mrobotics.io/product-p/m10020d.htm) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [Navisys L1/L2 ZED-F9P RTK - Base only](https://www.navisys.com.tw/productdetail?name=GR901&class=RTK) | F9P | | | | |
-| [RaccoonLab L1/L2 ZED-F9P][RaccoonLab L1/L2 ZED-F9P] | F9P | RM3100 | ✓ | | |
-| [RaccoonLab L1/L2 ZED-F9P with external antenna][RaccnLabL1L2ZED-F9P ext_ant] | F9P | RM3100 | ✓ | | |
-| [Septentrio AsteRx-m3 Pro](../gps_compass/septentrio_asterx-rib.md) | AsteRx | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
-| [Septentrio mosaic-go](../gps_compass/septentrio_mosaic-go.md) | mosaic X5 / mosaic H | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
-| [SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [SparkFun GPS-RTK2 Board - ZED-F9P](https://www.sparkfun.com/products/15136) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [Trimble MB-Two](../gps_compass/rtk_gps_trimble_mb_two.md) | F9P | ✓ | | ✓ | |
+| 设备 | GPS | 罗盘 | [DroneCAN](../dronecan/index.md) | [GPS Yaw](#configuring-gps-as-yaw-heading-source) | PPK |
+| :------------------------------------------------------------------------------------------------------------------- | :---------------------------------------------------------: | :-------------------------: | :------------------------------: | :-----------------------------------------------: | :-------------------------: |
+| [ARK RTK GPS](../dronecan/ark_rtk_gps.md) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
+| [ARK MOSAIC-X5 RTK GPS](../dronecan/ark_mosaic__rtk_gps.md) | Mosaic-X5 | IIS2MDC | ✓ | [Septentrio Dual Antenna][SeptDualAnt] | |
+| [CUAV C-RTK GPS](../gps_compass/rtk_gps_cuav_c-rtk.md) | M8P/M8N | ✓ | | | |
+| [CUAV C-RTK2](../gps_compass/rtk_gps_cuav_c-rtk2.md) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [CUAV C-RTK 9Ps GPS](../gps_compass/rtk_gps_cuav_c-rtk-9ps.md) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [CUAV C-RTK2 PPK/RTK GNSS](../gps_compass/rtk_gps_cuav_c-rtk.md) | F9P | RM3100 | | | ✓ |
+| [CubePilot Here+ RTK GPS](../gps_compass/rtk_gps_hex_hereplus.md) | M8P | HMC5983 | | | |
+| [CubePilot Here3 CAN GNSS GPS (M8N)](https://www.cubepilot.org/#/here/here3) | M8P | ICM20948 | ✓ | | |
+| [Drotek SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [DATAGNSS NANO HRTK Receiver](../gps_compass/rtk_gps_datagnss_nano_hrtk.md) | [D10P](https://docs.datagnss.com/gnss/gnss_module/D10P_RTK) | IST8310 | | ✘ | |
+| [DATAGNSS GEM1305 RTK Receiver](../gps_compass/rtk_gps_gem1305.md) | TAU951M | IST8310 | | ✘ | |
+| [Femtones MINI2 Receiver](../gps_compass/rtk_gps_fem_mini2.md) | FB672, FB6A0 | ✓ | | | |
+| [Freefly RTK GPS](../gps_compass/rtk_gps_freefly.md) | F9P | IST8310 | | | |
+| [Holybro H-RTK ZED-F9P RTK Rover (DroneCAN variant)](../dronecan/holybro_h_rtk_zed_f9p_gps.md) | F9P | RM3100 | ✓ | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK ZED-F9P RTK Rover](https://holybro.com/collections/h-rtk-gps/products/h-rtk-zed-f9p-rover) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Ultralight](https://holybro.com/products/h-rtk-f9p-ultralight) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Helical or Base](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
+| [Holybro DroneCAN H-RTK F9P Helical](https://holybro.com/products/dronecan-h-rtk-f9p-helical) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Rover Lite](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | | |
+| [Holybro DroneCAN H-RTK F9P Rover](https://holybro.com/products/dronecan-h-rtk-f9p-rover) | F9P | BMM150 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK M8P GNSS](../gps_compass/rtk_gps_holybro_h-rtk-m8p.md) | M8P | IST8310 | | | |
+| [Holybro H-RTK Unicore UM982 GPS](../gps_compass/rtk_gps_holybro_unicore_um982.md) | UM982 | IST8310 | | [Unicore Dual Antenna][UnicoreDualAnt] | |
+| [LOCOSYS Hawk R1](../gps_compass/rtk_gps_locosys_r1.md) | MC-1612-V2b | | | | |
+| [LOCOSYS Hawk R2](../gps_compass/rtk_gps_locosys_r2.md) | MC-1612-V2b | IST8310 | | | |
+| [mRo u-blox ZED-F9 RTK L1/L2 GPS](https://store.mrobotics.io/product-p/m10020d.htm) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [Navisys L1/L2 ZED-F9P RTK - Base only](https://www.navisys.com.tw/productdetail?name=GR901&class=RTK) | F9P | | | | |
+| [RaccoonLab L1/L2 ZED-F9P][RaccoonLab L1/L2 ZED-F9P] | F9P | RM3100 | ✓ | | |
+| [RaccoonLab L1/L2 ZED-F9P with external antenna][RaccnLabL1L2ZED-F9P ext_ant] | F9P | RM3100 | ✓ | | |
+| [Septentrio AsteRx-m3 Pro](../gps_compass/septentrio_asterx-rib.md) | AsteRx | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
+| [Septentrio mosaic-go](../gps_compass/septentrio_mosaic-go.md) | mosaic X5 / mosaic H | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
+| [SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [SparkFun GPS-RTK2 Board - ZED-F9P](https://www.sparkfun.com/products/15136) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [Trimble MB-Two](../gps_compass/rtk_gps_trimble_mb_two.md) | F9P | ✓ | | ✓ | |
@@ -142,7 +143,6 @@ The RTK GPS connection is essentially plug and play:

4. 测量完成:
-
- The RTK GPS icon changes to white and _QGroundControl_ starts to stream position data to the vehicle:

diff --git a/docs/zh/gps_compass/rtk_gps_datagnss_nano_hrtk.md b/docs/zh/gps_compass/rtk_gps_datagnss_nano_hrtk.md
new file mode 100644
index 00000000000..4a0bcc8152a
--- /dev/null
+++ b/docs/zh/gps_compass/rtk_gps_datagnss_nano_hrtk.md
@@ -0,0 +1,123 @@
+# DATAGNSS NANO HRTK receiver
+
+NANO HRTK receiver is a RTK receiver designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
+
+It is a high performance dual-band RTK receiver with compass, which is based on CYNOSURE series chipset.
+It supports global civil navigation systems, including GPS, BDS, GLONASS, Galileo, QZSS, and SBAS.
+
+NANO HRTK receiver support compass.
+It is designed for UAV, RTK, and other applications.
+
+
+
+:::info
+The NANO HRTK Receiver supports both base and rover options.
+It does not yet support _moving base_ mode.
+:::
+
+## 购买渠道
+
+- [NANO HRTK receiver](https://www.datagnss.com/collections/gnss-for-drone/products/nano-helix-rtk-receiver) (www.datagnss.com)
+
+## 主要特性
+
+- Full constellation, multi-frequency GNSS satellite receiver
+- Support RTK with up to 10hz output rate
+- Standard UART serial interface
+- Lightweight and compact size
+
+## Frequencies
+
+- GPS/QZSS: L1 C/A, L5C
+- GLONASS: L1OF
+- BEIDOU: B1I, B2a
+- GALILEO: E1, E5a
+- IRNSS: L5
+
+## GNSS
+
+- 128 hardware channels
+- 3D accuracy: **1.5m** CEP
+- RTK accuracy: **2cm** +1PPM(H), 3cm+1PPM(V)
+
+## Interface
+
+- UART \*2 : 230400bps default
+- SMA connector for antenna
+- Output rate 5Hz default, up to 10Hz
+- Main power supply: 4.7~5.2V
+
+## Protocol
+
+- NMEA-0183 output
+- RTCM3.x input/output
+
+## Environment
+
+- Operating temp. -20~85°C
+
+## Dimension and Weight
+
+- 35x30mm
+- 25g
+
+## 针脚定义
+
+The board is connected to the autopilot via UART interface.
+
+
+
+The 1.25mm pitch 6P connector supports UART for GNSS and I2C for compass.
+
+
+
+## 硬件安装
+
+RTK requires a base RTK module attached to the ground station, and a rover RTK module on the vehicle.
+The data from the base needs to be transmitted to the drone via telemetry radio and sent to the RTK receiver on the rover.
+
+
+
+The setup/connections for base and rover modules are shown below.
+
+### Base Setup (GCS)
+
+The base station connections are shown in the diagram below, along with the connection to a telemetry radio.
+
+
+
+Note that for the base we recommend the [NANO RTK Receiver](https://www.datagnss.com/collections/gnss-for-drone/products/multi-band-rtk-receiver-package) because it is easier to setup.
+
+
+
+See to [How to setup Base station](https://wiki.datagnss.com/index.php/GEM1305-autopilot#Base_station_setup) for information on how to configure the module for use as a base station (not including step 6 and later, for which you would QGroundControl instead of Mission Planner).
+
+### Rover Setup (PX4)
+
+The rover setup showing connections to a GPS port and the (required) connection to a telemetry radio are shown in the diagram below.
+
+
+
+The diagram below shows the wiring from the `GPS2` port on the Pixhawk 6c flight controller.
+Note that an appropriate cable is supplied for this purpose.
+
+GPS and RTK configuration on PX4 via _QGroundControl_ is plug and play (see [RTK GPS](../gps_compass/rtk_gps.md) for more information).
+
+## Package List
+
+- NANO HRTK Receiver
+- DG-6P-Cxx, GH-1.25mm-GH 6P cable
+- Helix antenna L1/L2/L5 (optional)
+
+## Resources
+
+- [NANO RTK Receiver 2D drawing file](https://wiki.datagnss.com/images/3/31/EVK-DG-1206_V.2.0.pdf)
+- [NANO HRTK Receiver Wiki](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-helix-rtk/) (DATAGNSS WiKi)
+- [HED-10L Heading RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/HED-10L/)
+
+## More information
+
+- [NANO RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-rtk-receiver)
+- [HELIX Antenna for RTK](https://www.datagnss.com/collections/rtk-antenna/products/smart-helix-antenna)
+- [RTK Antenna AGR6302G](https://www.datagnss.com/collections/rtk-antenna/products/antenna-agr6302g)
+- [AT400 RTK Antenna](https://www.datagnss.com/collections/rtk-antenna/products/at400-multi-band-antenna-for-rtk)
diff --git a/docs/zh/gps_compass/rtk_gps_gem1305.md b/docs/zh/gps_compass/rtk_gps_gem1305.md
index 3e5ba8dd255..7d6c66596aa 100644
--- a/docs/zh/gps_compass/rtk_gps_gem1305.md
+++ b/docs/zh/gps_compass/rtk_gps_gem1305.md
@@ -1,24 +1,22 @@
# DATAGNSS GEM1305 RTK Receiver with antenna
-GEM1305 is a RTK receiver with antenna designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
+GEM1305 is an [RTK GNSS](../gps_compass/rtk_gps.md) receiver with antenna designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
GEM1305 is based on the new generation CYNOSURE IV dual-core GNSS SoC.
It supports RTK functionality with a maximum data update rate of 10Hz, and comes with cables for connecting to GPS ports on most Pixhawk devices.
- -
-::: info
-
-- GEM1305 RTK doesn't support moving base mode yet.
-- GEM1305 RTK does not include a compass.
+
+:::info
+GEM1305 supports both base and rover options.
+It does not yet support _moving base_ mode.
:::
## 购买渠道
- [GEM1305 RTK receiver with antenna](https://www.datagnss.com/collections/gnss-for-drone/products/gem1305) (www.datagnss.com)
-
-
-::: info
-
-- GEM1305 RTK doesn't support moving base mode yet.
-- GEM1305 RTK does not include a compass.
+
+:::info
+GEM1305 supports both base and rover options.
+It does not yet support _moving base_ mode.
:::
## 购买渠道
- [GEM1305 RTK receiver with antenna](https://www.datagnss.com/collections/gnss-for-drone/products/gem1305) (www.datagnss.com)
-  + 
- [DGM10 RTK Receiver](https://www.datagnss.com/collections/gnss-for-drone/products/dgm10-rtk-receiver) (same receiver in a casing).
@@ -28,6 +26,7 @@ It supports RTK functionality with a maximum data update rate of 10Hz, and comes
- Full constellation, multi-frequency GNSS satellite receiver
- Support RTK with up to 10hz output rate
+- IST8310 compass
- Standard UART serial interface
- Lightweight only 50g or 26g(NANO RTK receiver)
- High performance antenna
@@ -73,16 +72,7 @@ The board is connected to the autopilot via UART interface.

-The 1.25mm pitch 6P connector (from left: PIN1 to PIN6):
-
-- 1: GND
-- 2: NC
-- 3: PPS
-- 4: Rx
-- 5: Tx
-- 6: 5V
-
-The board does not include a compass and so does not require connections for a compass part.
+The 1.25mm pitch 6P connector (from left: PIN1 to PIN6) supports UART for GNSS and I2C for compass.
## 硬件安装
@@ -125,10 +115,10 @@ GPS and RTK configuration on PX4 via _QGroundControl_ is plug and play (see [RTK
## Resources
-- [GEM1305 2D drawing file](https://wiki.datagnss.com/index.php/GEM1305)
- [NANO RTK Receiver 2D drawing file](https://wiki.datagnss.com/images/3/31/EVK-DG-1206_V.2.0.pdf)
-- [GEM1305 Wiki](https://wiki.datagnss.com/index.php/GEM1305) (DATAGNSS WiKi)
-- [HED-10L Heading RTK Receiver](https://wiki.datagnss.com/index.php/HED-10L)
+- [GEM1305 Wiki](https://docs.datagnss.com/gnss/rtk_receiver/GEM1305/) (DATAGNSS WiKi)
+- [HED-10L Heading RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/HED-10L/)
+- [NANO HRTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-helix-rtk/)
## More information
diff --git a/docs/zh/gps_compass/rtk_gps_trimble_mb_two.md b/docs/zh/gps_compass/rtk_gps_trimble_mb_two.md
index a6f91d88f5b..eb40bec59f4 100644
--- a/docs/zh/gps_compass/rtk_gps_trimble_mb_two.md
+++ b/docs/zh/gps_compass/rtk_gps_trimble_mb_two.md
@@ -1,6 +1,6 @@
# Trimble MB-Two
-The [Trimble MB-Two RTK GPS receiver](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) is a high-end, dual-frequency [RTK GPS module](../gps_compass/rtk_gps.md) that can be configured as either base or rover.
+The [Trimble MB-Two RTK GPS receiver](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) is a high-end, dual-frequency [RTK GPS module](../gps_compass/rtk_gps.md) that can be configured as either base or rover.
In addition to providing precise position information, the MB-Two can estimate heading angle (it has dual-antenna support). This is useful for situations where a compass cannot provide reliable heading information, for example when flying close to metal constructs.
@@ -18,7 +18,7 @@ The following firmware options need to be selected when buying the device:
## Antennas and Cable
The Trimble MB-Two requires two dual-frequency (L1/L2) antennas.
-A good example is the [Maxtenna M1227HCT-A2-SMA](http://www.maxtena.com/products/helicore/m1227hct-a2-sma/)
+A good example is the [Maxtenna M1227HCT-A2-SMA](https://www.maxtena.com/products/helicore/m1227hct-a2-sma/)
(which can be bought, for instance, from [Farnell](https://uk.farnell.com/maxtena/m1227hct-a2-sma/antenna-1-217-1-25-1-565-1-61ghz/dp/2484959)).
The antenna connector type on the device is MMCX.
diff --git a/docs/zh/hardware/board_support_guide.md b/docs/zh/hardware/board_support_guide.md
index 975261558a5..e9f3309f165 100644
--- a/docs/zh/hardware/board_support_guide.md
+++ b/docs/zh/hardware/board_support_guide.md
@@ -22,7 +22,6 @@ The general requirements for all supported boards are:
3. A clear and easy way to contact customer support for customers.
One or more of the following is accepted:
-
- PX4 Discord server presence
- Support email
- Phone number
@@ -33,7 +32,6 @@ The general requirements for all supported boards are:
For more information on bootloaders see: [PX4 Nuttx Porting Guide > Bootloader](../hardware/porting_guide_nuttx.md#bootloader).
6. Adequate documentation, which includes, but is not limited to:
-
- A complete pinout made available publicly that maps PX4 pin definitions to:
1. Microcontroller pins
2. Physical external connectors
@@ -52,13 +50,11 @@ Manufacturer supported boards may be as well/better supported than Pixhawk board
## Pixhawk Standard
-A Pixhawk board is one that conforms to the Pixhawk standards. These standards are laid out on [http://pixhawk.org](http://pixhawk.org/), but at high-level require that the board passes electrical tests mandated by the standard and the manufacturer has signed the Pixhawk adopter and trademark agreement.
+A Pixhawk board is one that conforms to the Pixhawk standards. These standards are laid out on [pixhawk.org](https://pixhawk.org/), but at high-level require that the board passes electrical tests mandated by the standard and the manufacturer has signed the Pixhawk adopter and trademark agreement.
PX4 generally only supports boards that are commercially available, which typically means that board standards released within the last five years are supported.
-
-
-### VER and REV ID (Hardware Revision and Version Sensing)
+### VER and REV ID (Hardware Revision and Version Sensing) {#ver_rev_id}
FMUv5 and onwards have an electrical sensing mechanism.
This sensing coupled with optional configuration data will be used to define hardware’s configuration with respect to a mandatory device and power supply configuration. Manufacturers must obtain the VER and REV ID from PX4 board maintainers by issuing a PR to ammend the [DS-018 Pixhawk standard](https://github.com/pixhawk/Pixhawk-Standards) for board versions and revisions.
diff --git a/docs/zh/hardware/porting_guide_nuttx.md b/docs/zh/hardware/porting_guide_nuttx.md
index 86cbc96ed1a..fb1c22d0ac5 100644
--- a/docs/zh/hardware/porting_guide_nuttx.md
+++ b/docs/zh/hardware/porting_guide_nuttx.md
@@ -53,7 +53,7 @@ First you will need a bootloader, which depends on the hardware target:
- STM32H7: the bootloader is based on NuttX, and is included in the PX4 Firmware.
See [here](https://github.com/PX4/PX4-Autopilot/tree/main/boards/holybro/durandal-v1/nuttx-config/bootloader) for an example.
-- For all other targets, https://github.com/PX4/Bootloader is used. See [here](https://github.com/PX4/Bootloader/pull/155/files) for an example how to add a new target.
+- For all other targets, https://github.com/PX4/PX4-Bootloader is used. See [here](https://github.com/PX4/PX4-Bootloader/pull/155/files) for an example how to add a new target.
Then checkout the [building and flashing instructions](../software_update/stm32_bootloader.md).
### Firmware Porting Steps
diff --git a/docs/zh/hardware/reference_design.md b/docs/zh/hardware/reference_design.md
index 5b36d0a67d5..4d3f19a0a6f 100644
--- a/docs/zh/hardware/reference_design.md
+++ b/docs/zh/hardware/reference_design.md
@@ -12,13 +12,13 @@ The PX4 reference design is the [Pixhawk series](../flight_controller/pixhawk_se
## 参考设计迭代:
-- FMUv1: Development board \(STM32F407, 128 KB RAM, 1MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv1)\) (no longer supported by PX4)
-- FMUv2: Pixhawk \(STM32F427, 168 MHz, 192 KB RAM, 1MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv2)\)
-- FMUv3: Pixhawk variants with 2MB flash \(3DR Pixhawk 2 \(Solo\), Hex Pixhawk 2.1, Holybro Pixfalcon, 3DR Pixhawk Mini, STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv3_REV_D)\)
+- FMUv1: Development board \(STM32F407, 128 KB RAM, 1MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv1)\) (no longer supported by PX4)
+- FMUv2: Pixhawk \(STM32F427, 168 MHz, 192 KB RAM, 1MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv2)\)
+- FMUv3: Pixhawk variants with 2MB flash \(3DR Pixhawk 2 \(Solo\), Hex Pixhawk 2.1, Holybro Pixfalcon, 3DR Pixhawk Mini, STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv3_REV_D)\)
- FMUv4: Pixracer \(STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1raRRouNsveQz8cj-EneWG6iW0dqGfRAifI91I2Sr5E0/edit#gid=1585075739)\)
- FMUv4 PRO: Drotek Pixhawk 3 PRO \(STM32F469, 180 MHz, 384 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1raRRouNsveQz8cj-EneWG6iW0dqGfRAifI91I2Sr5E0/edit#gid=1585075739)\)
- FMUv5: Holybro Pixhawk 4 \(STM32F765, 216 MHz, 512 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165)\)
-- FMUv5X: (Multiple Products) \(STM32F765, 400 MHz, 512KB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-011%20Pixhawk%20Autopilot%20v5X%20Standard.pdf))
+- FMUv5X: (Multiple Products) \(STM32F765, 400 MHz, 512KB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-011%20Pixhawk%20Autopilot%20v5X%20Standard.pdf))
- FMUv6X: (Multiple Products) \(STM32H753, 480 MHz, 1 MB RAM, 2 MB flash\) and variant 6i \(i.MX RT1050, 600 MHz, 512 KB RAM, external flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-012%20Pixhawk%20Autopilot%20v6X%20Standard.pdf))
- FMUv6C: (Multiple Products) \(STM32H743V, 480 MHz, 1 MB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-018%20Pixhawk%20Autopilot%20v6C%20Standard.pdf))
- FMUv6U: (Multiple Products) \(STM32H753, 400 MHz, 1 MB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-016%20Pixhawk%20Autopilot%20v6U%20Standard.pdf))
diff --git a/docs/zh/index.md b/docs/zh/index.md
index f2f693b9d54..d529b16518a 100644
--- a/docs/zh/index.md
+++ b/docs/zh/index.md
@@ -101,7 +101,7 @@ _PX4_ 是一款专业级飞控。
## 许可证
-PX4 代码可依据宽松的 [BSD 3-clause license](https://opensource.org/licenses/BSD-3-Clause) 免费使用和修改。
+PX4 code is free to use and modify under the terms of the permissive [BSD 3-clause license](https://opensource.org/license/BSD-3-Clause).
此文档已使用 [CC BY 4.0]授权。(https://creativecommons.org/licenses/by/4.0/)。
详情见: [Licences](contribute/licenses.md)。
@@ -127,7 +127,7 @@ _Dronecode 日历_ 展示了面向平台用户和开发者的重要社区活动
+ 
- [DGM10 RTK Receiver](https://www.datagnss.com/collections/gnss-for-drone/products/dgm10-rtk-receiver) (same receiver in a casing).
@@ -28,6 +26,7 @@ It supports RTK functionality with a maximum data update rate of 10Hz, and comes
- Full constellation, multi-frequency GNSS satellite receiver
- Support RTK with up to 10hz output rate
+- IST8310 compass
- Standard UART serial interface
- Lightweight only 50g or 26g(NANO RTK receiver)
- High performance antenna
@@ -73,16 +72,7 @@ The board is connected to the autopilot via UART interface.

-The 1.25mm pitch 6P connector (from left: PIN1 to PIN6):
-
-- 1: GND
-- 2: NC
-- 3: PPS
-- 4: Rx
-- 5: Tx
-- 6: 5V
-
-The board does not include a compass and so does not require connections for a compass part.
+The 1.25mm pitch 6P connector (from left: PIN1 to PIN6) supports UART for GNSS and I2C for compass.
## 硬件安装
@@ -125,10 +115,10 @@ GPS and RTK configuration on PX4 via _QGroundControl_ is plug and play (see [RTK
## Resources
-- [GEM1305 2D drawing file](https://wiki.datagnss.com/index.php/GEM1305)
- [NANO RTK Receiver 2D drawing file](https://wiki.datagnss.com/images/3/31/EVK-DG-1206_V.2.0.pdf)
-- [GEM1305 Wiki](https://wiki.datagnss.com/index.php/GEM1305) (DATAGNSS WiKi)
-- [HED-10L Heading RTK Receiver](https://wiki.datagnss.com/index.php/HED-10L)
+- [GEM1305 Wiki](https://docs.datagnss.com/gnss/rtk_receiver/GEM1305/) (DATAGNSS WiKi)
+- [HED-10L Heading RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/HED-10L/)
+- [NANO HRTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-helix-rtk/)
## More information
diff --git a/docs/zh/gps_compass/rtk_gps_trimble_mb_two.md b/docs/zh/gps_compass/rtk_gps_trimble_mb_two.md
index a6f91d88f5b..eb40bec59f4 100644
--- a/docs/zh/gps_compass/rtk_gps_trimble_mb_two.md
+++ b/docs/zh/gps_compass/rtk_gps_trimble_mb_two.md
@@ -1,6 +1,6 @@
# Trimble MB-Two
-The [Trimble MB-Two RTK GPS receiver](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) is a high-end, dual-frequency [RTK GPS module](../gps_compass/rtk_gps.md) that can be configured as either base or rover.
+The [Trimble MB-Two RTK GPS receiver](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) is a high-end, dual-frequency [RTK GPS module](../gps_compass/rtk_gps.md) that can be configured as either base or rover.
In addition to providing precise position information, the MB-Two can estimate heading angle (it has dual-antenna support). This is useful for situations where a compass cannot provide reliable heading information, for example when flying close to metal constructs.
@@ -18,7 +18,7 @@ The following firmware options need to be selected when buying the device:
## Antennas and Cable
The Trimble MB-Two requires two dual-frequency (L1/L2) antennas.
-A good example is the [Maxtenna M1227HCT-A2-SMA](http://www.maxtena.com/products/helicore/m1227hct-a2-sma/)
+A good example is the [Maxtenna M1227HCT-A2-SMA](https://www.maxtena.com/products/helicore/m1227hct-a2-sma/)
(which can be bought, for instance, from [Farnell](https://uk.farnell.com/maxtena/m1227hct-a2-sma/antenna-1-217-1-25-1-565-1-61ghz/dp/2484959)).
The antenna connector type on the device is MMCX.
diff --git a/docs/zh/hardware/board_support_guide.md b/docs/zh/hardware/board_support_guide.md
index 975261558a5..e9f3309f165 100644
--- a/docs/zh/hardware/board_support_guide.md
+++ b/docs/zh/hardware/board_support_guide.md
@@ -22,7 +22,6 @@ The general requirements for all supported boards are:
3. A clear and easy way to contact customer support for customers.
One or more of the following is accepted:
-
- PX4 Discord server presence
- Support email
- Phone number
@@ -33,7 +32,6 @@ The general requirements for all supported boards are:
For more information on bootloaders see: [PX4 Nuttx Porting Guide > Bootloader](../hardware/porting_guide_nuttx.md#bootloader).
6. Adequate documentation, which includes, but is not limited to:
-
- A complete pinout made available publicly that maps PX4 pin definitions to:
1. Microcontroller pins
2. Physical external connectors
@@ -52,13 +50,11 @@ Manufacturer supported boards may be as well/better supported than Pixhawk board
## Pixhawk Standard
-A Pixhawk board is one that conforms to the Pixhawk standards. These standards are laid out on [http://pixhawk.org](http://pixhawk.org/), but at high-level require that the board passes electrical tests mandated by the standard and the manufacturer has signed the Pixhawk adopter and trademark agreement.
+A Pixhawk board is one that conforms to the Pixhawk standards. These standards are laid out on [pixhawk.org](https://pixhawk.org/), but at high-level require that the board passes electrical tests mandated by the standard and the manufacturer has signed the Pixhawk adopter and trademark agreement.
PX4 generally only supports boards that are commercially available, which typically means that board standards released within the last five years are supported.
-
-
-### VER and REV ID (Hardware Revision and Version Sensing)
+### VER and REV ID (Hardware Revision and Version Sensing) {#ver_rev_id}
FMUv5 and onwards have an electrical sensing mechanism.
This sensing coupled with optional configuration data will be used to define hardware’s configuration with respect to a mandatory device and power supply configuration. Manufacturers must obtain the VER and REV ID from PX4 board maintainers by issuing a PR to ammend the [DS-018 Pixhawk standard](https://github.com/pixhawk/Pixhawk-Standards) for board versions and revisions.
diff --git a/docs/zh/hardware/porting_guide_nuttx.md b/docs/zh/hardware/porting_guide_nuttx.md
index 86cbc96ed1a..fb1c22d0ac5 100644
--- a/docs/zh/hardware/porting_guide_nuttx.md
+++ b/docs/zh/hardware/porting_guide_nuttx.md
@@ -53,7 +53,7 @@ First you will need a bootloader, which depends on the hardware target:
- STM32H7: the bootloader is based on NuttX, and is included in the PX4 Firmware.
See [here](https://github.com/PX4/PX4-Autopilot/tree/main/boards/holybro/durandal-v1/nuttx-config/bootloader) for an example.
-- For all other targets, https://github.com/PX4/Bootloader is used. See [here](https://github.com/PX4/Bootloader/pull/155/files) for an example how to add a new target.
+- For all other targets, https://github.com/PX4/PX4-Bootloader is used. See [here](https://github.com/PX4/PX4-Bootloader/pull/155/files) for an example how to add a new target.
Then checkout the [building and flashing instructions](../software_update/stm32_bootloader.md).
### Firmware Porting Steps
diff --git a/docs/zh/hardware/reference_design.md b/docs/zh/hardware/reference_design.md
index 5b36d0a67d5..4d3f19a0a6f 100644
--- a/docs/zh/hardware/reference_design.md
+++ b/docs/zh/hardware/reference_design.md
@@ -12,13 +12,13 @@ The PX4 reference design is the [Pixhawk series](../flight_controller/pixhawk_se
## 参考设计迭代:
-- FMUv1: Development board \(STM32F407, 128 KB RAM, 1MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv1)\) (no longer supported by PX4)
-- FMUv2: Pixhawk \(STM32F427, 168 MHz, 192 KB RAM, 1MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv2)\)
-- FMUv3: Pixhawk variants with 2MB flash \(3DR Pixhawk 2 \(Solo\), Hex Pixhawk 2.1, Holybro Pixfalcon, 3DR Pixhawk Mini, STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv3_REV_D)\)
+- FMUv1: Development board \(STM32F407, 128 KB RAM, 1MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv1)\) (no longer supported by PX4)
+- FMUv2: Pixhawk \(STM32F427, 168 MHz, 192 KB RAM, 1MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv2)\)
+- FMUv3: Pixhawk variants with 2MB flash \(3DR Pixhawk 2 \(Solo\), Hex Pixhawk 2.1, Holybro Pixfalcon, 3DR Pixhawk Mini, STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv3_REV_D)\)
- FMUv4: Pixracer \(STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1raRRouNsveQz8cj-EneWG6iW0dqGfRAifI91I2Sr5E0/edit#gid=1585075739)\)
- FMUv4 PRO: Drotek Pixhawk 3 PRO \(STM32F469, 180 MHz, 384 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1raRRouNsveQz8cj-EneWG6iW0dqGfRAifI91I2Sr5E0/edit#gid=1585075739)\)
- FMUv5: Holybro Pixhawk 4 \(STM32F765, 216 MHz, 512 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165)\)
-- FMUv5X: (Multiple Products) \(STM32F765, 400 MHz, 512KB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-011%20Pixhawk%20Autopilot%20v5X%20Standard.pdf))
+- FMUv5X: (Multiple Products) \(STM32F765, 400 MHz, 512KB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-011%20Pixhawk%20Autopilot%20v5X%20Standard.pdf))
- FMUv6X: (Multiple Products) \(STM32H753, 480 MHz, 1 MB RAM, 2 MB flash\) and variant 6i \(i.MX RT1050, 600 MHz, 512 KB RAM, external flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-012%20Pixhawk%20Autopilot%20v6X%20Standard.pdf))
- FMUv6C: (Multiple Products) \(STM32H743V, 480 MHz, 1 MB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-018%20Pixhawk%20Autopilot%20v6C%20Standard.pdf))
- FMUv6U: (Multiple Products) \(STM32H753, 400 MHz, 1 MB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-016%20Pixhawk%20Autopilot%20v6U%20Standard.pdf))
diff --git a/docs/zh/index.md b/docs/zh/index.md
index f2f693b9d54..d529b16518a 100644
--- a/docs/zh/index.md
+++ b/docs/zh/index.md
@@ -101,7 +101,7 @@ _PX4_ 是一款专业级飞控。
## 许可证
-PX4 代码可依据宽松的 [BSD 3-clause license](https://opensource.org/licenses/BSD-3-Clause) 免费使用和修改。
+PX4 code is free to use and modify under the terms of the permissive [BSD 3-clause license](https://opensource.org/license/BSD-3-Clause).
此文档已使用 [CC BY 4.0]授权。(https://creativecommons.org/licenses/by/4.0/)。
详情见: [Licences](contribute/licenses.md)。
@@ -127,7 +127,7 @@ _Dronecode 日历_ 展示了面向平台用户和开发者的重要社区活动
") _placeholder_icon 由 Smashicons 通过 www.flaticon.com 创作,使用 CC 3.0 By 授权。
-<0/> _camera-automatic-mode_ 图标由 <1>Freepik 通过 <2>www.flaticon.com 创作,使用 <3>CC 3.0 BY 授权。
+
_placeholder_icon 由 Smashicons 通过 www.flaticon.com 创作,使用 CC 3.0 By 授权。
-<0/> _camera-automatic-mode_ 图标由 <1>Freepik 通过 <2>www.flaticon.com 创作,使用 <3>CC 3.0 BY 授权。
+ _camera-automatic-mode_ icon made by Freepik from www.flaticon.com is licensed by CC 3.0 BY.
## 治理
diff --git a/docs/zh/modules/hello_sky.md b/docs/zh/modules/hello_sky.md
index f111abd0de3..24646f3517d 100644
--- a/docs/zh/modules/hello_sky.md
+++ b/docs/zh/modules/hello_sky.md
@@ -28,7 +28,6 @@ This consists of a single _C_ file and a _cmake_ definition (which tells the too
1. Create a new directory **PX4-Autopilot/src/examples/px4_simple_app**.
2. Create a new C file in that directory named **px4_simple_app.c**:
-
- Copy in the default header to the top of the page.
该注释应出现在所有贡献的文件中!
@@ -308,7 +307,7 @@ int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
The `sensor_sub_fd` is a topic handle and can be used to very efficiently perform a blocking wait for new data.
当前线程进入休眠状态,一旦有新数据可用就会被调度器自动唤醒,等待时不消耗任何 CPU 周期。
-To do this, we use the [poll()](http://pubs.opengroup.org/onlinepubs/007908799/xsh/poll.html) POSIX system call.
+To do this, we use the [poll()](https://pubs.opengroup.org/onlinepubs/007908799/xsh/poll.html) POSIX system call.
Adding `poll()` to the subscription looks like (_pseudocode, look for the full implementation below_):
diff --git a/docs/zh/peripherals/frsky_telemetry.md b/docs/zh/peripherals/frsky_telemetry.md
index ae7748e43c1..130f3f10810 100644
--- a/docs/zh/peripherals/frsky_telemetry.md
+++ b/docs/zh/peripherals/frsky_telemetry.md
@@ -97,7 +97,7 @@ Compatible Taranis receivers (e.g. X9D Plus) running OpenTX 2.1.6 or newer can u

-Instructions for installing the script can be found here: [LuaPilot Taranis Telemetry script > Taranis Setup OpenTX 2.1.6 or newer](http://ilihack.github.io/LuaPilot_Taranis_Telemetry/)
+Instructions for installing the script can be found here: [LuaPilot Taranis Telemetry script > Taranis Setup OpenTX 2.1.6 or newer](https://ilihack.github.io/LuaPilot_Taranis_Telemetry/)
If you open the `LuaPil.lua` script with a text editor, you can edit the configuration. Suggested modifications include:
@@ -190,7 +190,7 @@ Note that the X series receivers listed below are recommended (e.g. XSR, X8R). T
| R9 slim | 10km | S.Bus (16) | Smart Port | 43.3x26.8x13.9mm | 15.8g |
:::info
-The above table originates from http://www.redsilico.com/frsky-receiver-chart and FrSky [product documentation](https://www.frsky-rc.com/product-category/receivers/).
+The above table originates from https://blog.redsilico.com/frsky-receiver-chart and FrSky [product documentation](https://www.frsky-rc.com/product-category/receivers/).
:::
@@ -199,9 +199,9 @@ The above table originates from http://www.redsilico.com/frsky-receiver-chart an
Ready-made cables for use with Pixhawk FMUv4 and earlier (except for Pixracer) are available from:
-- [Craft and Theory](http://www.craftandtheoryllc.com/telemetry-cable). Versions are available with DF-13 compatible _PicoBlade connectors_ (for FMUv2/3DR Pixhawk, FMUv2/HKPilot32) and _JST-GH connectors_ (for FMUv3/Pixhawk 2 "The Cube" and FMUv4/PixRacer v1).
+- [Craft and Theory](https://www.craftandtheoryllc.com/store/telemetry-cables-for-smart-port-radios/). Versions are available with DF-13 compatible _PicoBlade connectors_ (for FMUv2/3DR Pixhawk, FMUv2/HKPilot32) and _JST-GH connectors_ (for FMUv3/Pixhawk 2 "The Cube" and FMUv4/PixRacer v1).
-
_camera-automatic-mode_ icon made by Freepik from www.flaticon.com is licensed by CC 3.0 BY.
## 治理
diff --git a/docs/zh/modules/hello_sky.md b/docs/zh/modules/hello_sky.md
index f111abd0de3..24646f3517d 100644
--- a/docs/zh/modules/hello_sky.md
+++ b/docs/zh/modules/hello_sky.md
@@ -28,7 +28,6 @@ This consists of a single _C_ file and a _cmake_ definition (which tells the too
1. Create a new directory **PX4-Autopilot/src/examples/px4_simple_app**.
2. Create a new C file in that directory named **px4_simple_app.c**:
-
- Copy in the default header to the top of the page.
该注释应出现在所有贡献的文件中!
@@ -308,7 +307,7 @@ int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
The `sensor_sub_fd` is a topic handle and can be used to very efficiently perform a blocking wait for new data.
当前线程进入休眠状态,一旦有新数据可用就会被调度器自动唤醒,等待时不消耗任何 CPU 周期。
-To do this, we use the [poll()](http://pubs.opengroup.org/onlinepubs/007908799/xsh/poll.html) POSIX system call.
+To do this, we use the [poll()](https://pubs.opengroup.org/onlinepubs/007908799/xsh/poll.html) POSIX system call.
Adding `poll()` to the subscription looks like (_pseudocode, look for the full implementation below_):
diff --git a/docs/zh/peripherals/frsky_telemetry.md b/docs/zh/peripherals/frsky_telemetry.md
index ae7748e43c1..130f3f10810 100644
--- a/docs/zh/peripherals/frsky_telemetry.md
+++ b/docs/zh/peripherals/frsky_telemetry.md
@@ -97,7 +97,7 @@ Compatible Taranis receivers (e.g. X9D Plus) running OpenTX 2.1.6 or newer can u

-Instructions for installing the script can be found here: [LuaPilot Taranis Telemetry script > Taranis Setup OpenTX 2.1.6 or newer](http://ilihack.github.io/LuaPilot_Taranis_Telemetry/)
+Instructions for installing the script can be found here: [LuaPilot Taranis Telemetry script > Taranis Setup OpenTX 2.1.6 or newer](https://ilihack.github.io/LuaPilot_Taranis_Telemetry/)
If you open the `LuaPil.lua` script with a text editor, you can edit the configuration. Suggested modifications include:
@@ -190,7 +190,7 @@ Note that the X series receivers listed below are recommended (e.g. XSR, X8R). T
| R9 slim | 10km | S.Bus (16) | Smart Port | 43.3x26.8x13.9mm | 15.8g |
:::info
-The above table originates from http://www.redsilico.com/frsky-receiver-chart and FrSky [product documentation](https://www.frsky-rc.com/product-category/receivers/).
+The above table originates from https://blog.redsilico.com/frsky-receiver-chart and FrSky [product documentation](https://www.frsky-rc.com/product-category/receivers/).
:::
@@ -199,9 +199,9 @@ The above table originates from http://www.redsilico.com/frsky-receiver-chart an
Ready-made cables for use with Pixhawk FMUv4 and earlier (except for Pixracer) are available from:
-- [Craft and Theory](http://www.craftandtheoryllc.com/telemetry-cable). Versions are available with DF-13 compatible _PicoBlade connectors_ (for FMUv2/3DR Pixhawk, FMUv2/HKPilot32) and _JST-GH connectors_ (for FMUv3/Pixhawk 2 "The Cube" and FMUv4/PixRacer v1).
+- [Craft and Theory](https://www.craftandtheoryllc.com/store/telemetry-cables-for-smart-port-radios/). Versions are available with DF-13 compatible _PicoBlade connectors_ (for FMUv2/3DR Pixhawk, FMUv2/HKPilot32) and _JST-GH connectors_ (for FMUv3/Pixhawk 2 "The Cube" and FMUv4/PixRacer v1).
-  +
@@ -214,7 +214,7 @@ The Pixracer includes electronics for converting between S.PORT and UART signals
These can be sourced from:
- [FrSky FUL-1](https://www.frsky-rc.com/product/ful-1/): [unmannedtech.co.uk](https://www.unmannedtechshop.co.uk/frsky-transmitter-receiver-upgrade-adapter-ful-1/)
-- SPC: [getfpv.com](http://www.getfpv.com/frsky-smart-port-converter-cable.html), [unmannedtechshop.co.uk](https://www.unmannedtechshop.co.uk/frsky-smart-port-converter-spc/)
+- SPC: [getfpv.com](https://www.getfpv.com/frsky-smart-port-converter-cable.html), [unmannedtechshop.co.uk](https://www.unmannedtechshop.co.uk/frsky-smart-port-converter-spc/)
More information about the connections for different boards is given below.
diff --git a/docs/zh/peripherals/gripper_servo.md b/docs/zh/peripherals/gripper_servo.md
index 43e12647542..f918f5c46c1 100644
--- a/docs/zh/peripherals/gripper_servo.md
+++ b/docs/zh/peripherals/gripper_servo.md
@@ -9,7 +9,7 @@ This section explains how to connect and configure a [gripper](../peripherals/gr
The following PWM-connected servos have been tested with PX4:
- [R4-EM-R22-161 push-to-close latch electronic lock](https://southco.com/en_any_int/r4-em-r22-161) (SouthCo)
-- [FluxGrip FG40 electro-permanent magnetic gripper](http://zubax.com/fg40) (Zubax)
+- [FluxGrip FG40 electro-permanent magnetic gripper](https://shop.zubax.com/products/zubax-epm) (Zubax)
## Connecting a PWM-controlled Gripper
diff --git a/docs/zh/peripherals/vesc.md b/docs/zh/peripherals/vesc.md
index 03ad68a79e5..b3280b717d8 100644
--- a/docs/zh/peripherals/vesc.md
+++ b/docs/zh/peripherals/vesc.md
@@ -55,4 +55,4 @@ See DroneCAN Troubleshooting - (index.md#troubleshooting).
## 更多信息
- [VESC Project ESCs](https://vesc-project.com/)
-- [Benjamin Vedder's blog](http://vedder.se) (project owner)
+- [Benjamin Vedder's blog](https://vedder.se/) (project owner)
diff --git a/docs/zh/releases/1.12.md b/docs/zh/releases/1.12.md
index e91e3483490..29f244f9041 100644
--- a/docs/zh/releases/1.12.md
+++ b/docs/zh/releases/1.12.md
@@ -51,9 +51,9 @@ The release includes new hardware support for the following boards, peripherals,
- Pixhawk FMUv6U (Read more about this spec on the [Pixhawk GitHub Repository](https://github.com/pixhawk/Pixhawk-Standards))
- Pixhawk FMUv6X (Read more about this spec on the [Pixhawk GitHub Repository](https://github.com/pixhawk/Pixhawk-Standards))
-- CUAV X7 / X7Pro ([Read more about this product on the manufacturers site](http://www.cuav.net/en/x7en/)]
-- CUAV Nora ([Read more about this product on the manufacturers site](http://www.cuav.net/en/nora/))
-- CUAV CAN GPS ([Read more about this product on the manufacturers site](http://www.cuav.net/en/neo-3-2/))
+- CUAV X7 / X7Pro
+- CUAV Nora
+- CUAV CAN GPS (Neo-3-2)
- SP Racing H7 Extreme ([Read more about this product on the manufacturers site](http://seriouslypro.com/spracingh7extreme))
- Bitcraze Crazyflie v2.1 ([Read more about this product on the manufacturers site](https://www.bitcraze.io/products/crazyflie-2-1/))
- ARK CAN Flow ([Read more about this product on the manufacturers site](https://arkelectron.com/product/ark-flow/))
@@ -81,7 +81,6 @@ These are removed:
### 多旋翼
- **More intuitive stick feel in Position mode**
-
- Horizontal stick input mapped to acceleration instead of velocity setpoints
- Removes unexpected tilt changes upon reaching travel speed velocity
- Intuitive shunting e.g. when landing
@@ -89,7 +88,6 @@ These are removed:
- Development: [First attempt](https://github.com/PX4/PX4-Autopilot/pull/12072), [Introduction](https://github.com/PX4/PX4-Autopilot/pull/16052), [Improvements](https://github.com/PX4/PX4-Autopilot/pull/16320), [Bugfix zero oscillation](https://github.com/PX4/PX4-Autopilot/pull/16786), [Bugfix position unlock](https://github.com/PX4/PX4-Autopilot/pull/16791), [Bugfix invalid setpoint](https://github.com/PX4/PX4-Autopilot/pull/17078), [Bugfix high velocity pre takeoff](https://github.com/PX4/PX4-Autopilot/pull/17437)
- **Hover thrust independent velocity control gains**
-
- Parameters `MPC_{XY/Z}_VEL_{P/I/D}` were replaced with `MPC_{XY/Z}_VEL_{P/I/D}_ACC`, see:
[MPC_XY_VEL_P_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_P_ACC), [MPC_XY_VEL_I_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_I_ACC), [MPC_XY_VEL_D_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_D_ACC), [MPC_Z_VEL_P_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_P_ACC), [MPC_Z_VEL_I_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_I_ACC), [MPC_Z_VEL_D_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_D_ACC)
@@ -144,7 +142,6 @@ Nuttx was upgraded from [8.2+ to NuttX 10.10.0+](https://github.com/apache/incub
- [**BACKPORT**] stm32:Ethernet Fix too big frames
- **Boot up stability** V5-V6X ensuring the LSE (RTC) oscillator is started
-
- [**BACKPORT**] stm32h7:lse fix Kconfig help text
- [**BACKPORT**] stm32f7:lse Use Kconfig values directly
- [**BACKPORT**] stm32h7:Add DBGMCU
@@ -164,7 +161,6 @@ Nuttx was upgraded from [8.2+ to NuttX 10.10.0+](https://github.com/apache/incub
:::
- **Driver changes**
-
- [**BACKPORT**] drivers/serial: fix Rx interrupt enable for cdcacm
- [**BACKPORT**] binnfmt:Fix return before close ELF fd
diff --git a/docs/zh/releases/1.16.md b/docs/zh/releases/1.16.md
index a8e81777c36..d7e44718b96 100644
--- a/docs/zh/releases/1.16.md
+++ b/docs/zh/releases/1.16.md
@@ -208,7 +208,7 @@ This release contains a major rework for the rover support in PX4:
- Generic Mecanum Rover `52000`.
- Library for the [pure pursuit guidance algorithm](../config_rover/position_tuning.md#pure-pursuit-guidance-logic-info-only) that is shared by all the rover modules.
- [Simulation](../frames_rover/index.md#simulation) for differential-steering and Ackermann rovers in gazebo (for release notes see `r1_rover` and `rover_ackermann` in [simulation](#simulation)).
-- Deprecation of the [rover position control](../frames_rover/rover_position_control.md) module: Note that the legacy rover module still exists but has been superseded by the new dedicated modules.
+- Deprecation of the `rover position control` module: Note that the legacy rover module still exists but has been superseded by the new dedicated modules.
### Infrastructure
diff --git a/docs/zh/ros/external_position_estimation.md b/docs/zh/ros/external_position_estimation.md
index 892c63fec44..b39bcb5bf9d 100644
--- a/docs/zh/ros/external_position_estimation.md
+++ b/docs/zh/ros/external_position_estimation.md
@@ -187,7 +187,7 @@ MAVROS has plugins to relay a visual estimation from a VIO or MoCap system using
You can use any of the above pipelines with LPE.
If you're working with EKF2, only the "vision" pipelines are supported.
-To use MoCap data with EKF2 you will have to [remap](http://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
+To use MoCap data with EKF2 you will have to [remap](https://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
- MoCap ROS topics of type `geometry_msgs/PoseStamped` or `geometry_msgs/PoseWithCovarianceStamped` must be remapped to `/mavros/vision_pose/pose`.
The `geometry_msgs/PoseStamped` topic is most common as MoCap doesn't usually have associated covariances to the data.
@@ -205,7 +205,7 @@ The local/world and world frames used by ROS and PX4 are different.
| 世界坐标系 | FRD or NED (X **N**orth, Y **E**ast, Z **D**own) | FLU or ENU (X **E**ast, Y **N**orth, Z **U**p), with the naming being `odom` or `map` |
:::tip
-See [REP105: Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
+See [REP105: Coordinate Frames for Mobile Platforms](https://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
:::
如果你把机体命名为
+
@@ -214,7 +214,7 @@ The Pixracer includes electronics for converting between S.PORT and UART signals
These can be sourced from:
- [FrSky FUL-1](https://www.frsky-rc.com/product/ful-1/): [unmannedtech.co.uk](https://www.unmannedtechshop.co.uk/frsky-transmitter-receiver-upgrade-adapter-ful-1/)
-- SPC: [getfpv.com](http://www.getfpv.com/frsky-smart-port-converter-cable.html), [unmannedtechshop.co.uk](https://www.unmannedtechshop.co.uk/frsky-smart-port-converter-spc/)
+- SPC: [getfpv.com](https://www.getfpv.com/frsky-smart-port-converter-cable.html), [unmannedtechshop.co.uk](https://www.unmannedtechshop.co.uk/frsky-smart-port-converter-spc/)
More information about the connections for different boards is given below.
diff --git a/docs/zh/peripherals/gripper_servo.md b/docs/zh/peripherals/gripper_servo.md
index 43e12647542..f918f5c46c1 100644
--- a/docs/zh/peripherals/gripper_servo.md
+++ b/docs/zh/peripherals/gripper_servo.md
@@ -9,7 +9,7 @@ This section explains how to connect and configure a [gripper](../peripherals/gr
The following PWM-connected servos have been tested with PX4:
- [R4-EM-R22-161 push-to-close latch electronic lock](https://southco.com/en_any_int/r4-em-r22-161) (SouthCo)
-- [FluxGrip FG40 electro-permanent magnetic gripper](http://zubax.com/fg40) (Zubax)
+- [FluxGrip FG40 electro-permanent magnetic gripper](https://shop.zubax.com/products/zubax-epm) (Zubax)
## Connecting a PWM-controlled Gripper
diff --git a/docs/zh/peripherals/vesc.md b/docs/zh/peripherals/vesc.md
index 03ad68a79e5..b3280b717d8 100644
--- a/docs/zh/peripherals/vesc.md
+++ b/docs/zh/peripherals/vesc.md
@@ -55,4 +55,4 @@ See DroneCAN Troubleshooting - (index.md#troubleshooting).
## 更多信息
- [VESC Project ESCs](https://vesc-project.com/)
-- [Benjamin Vedder's blog](http://vedder.se) (project owner)
+- [Benjamin Vedder's blog](https://vedder.se/) (project owner)
diff --git a/docs/zh/releases/1.12.md b/docs/zh/releases/1.12.md
index e91e3483490..29f244f9041 100644
--- a/docs/zh/releases/1.12.md
+++ b/docs/zh/releases/1.12.md
@@ -51,9 +51,9 @@ The release includes new hardware support for the following boards, peripherals,
- Pixhawk FMUv6U (Read more about this spec on the [Pixhawk GitHub Repository](https://github.com/pixhawk/Pixhawk-Standards))
- Pixhawk FMUv6X (Read more about this spec on the [Pixhawk GitHub Repository](https://github.com/pixhawk/Pixhawk-Standards))
-- CUAV X7 / X7Pro ([Read more about this product on the manufacturers site](http://www.cuav.net/en/x7en/)]
-- CUAV Nora ([Read more about this product on the manufacturers site](http://www.cuav.net/en/nora/))
-- CUAV CAN GPS ([Read more about this product on the manufacturers site](http://www.cuav.net/en/neo-3-2/))
+- CUAV X7 / X7Pro
+- CUAV Nora
+- CUAV CAN GPS (Neo-3-2)
- SP Racing H7 Extreme ([Read more about this product on the manufacturers site](http://seriouslypro.com/spracingh7extreme))
- Bitcraze Crazyflie v2.1 ([Read more about this product on the manufacturers site](https://www.bitcraze.io/products/crazyflie-2-1/))
- ARK CAN Flow ([Read more about this product on the manufacturers site](https://arkelectron.com/product/ark-flow/))
@@ -81,7 +81,6 @@ These are removed:
### 多旋翼
- **More intuitive stick feel in Position mode**
-
- Horizontal stick input mapped to acceleration instead of velocity setpoints
- Removes unexpected tilt changes upon reaching travel speed velocity
- Intuitive shunting e.g. when landing
@@ -89,7 +88,6 @@ These are removed:
- Development: [First attempt](https://github.com/PX4/PX4-Autopilot/pull/12072), [Introduction](https://github.com/PX4/PX4-Autopilot/pull/16052), [Improvements](https://github.com/PX4/PX4-Autopilot/pull/16320), [Bugfix zero oscillation](https://github.com/PX4/PX4-Autopilot/pull/16786), [Bugfix position unlock](https://github.com/PX4/PX4-Autopilot/pull/16791), [Bugfix invalid setpoint](https://github.com/PX4/PX4-Autopilot/pull/17078), [Bugfix high velocity pre takeoff](https://github.com/PX4/PX4-Autopilot/pull/17437)
- **Hover thrust independent velocity control gains**
-
- Parameters `MPC_{XY/Z}_VEL_{P/I/D}` were replaced with `MPC_{XY/Z}_VEL_{P/I/D}_ACC`, see:
[MPC_XY_VEL_P_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_P_ACC), [MPC_XY_VEL_I_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_I_ACC), [MPC_XY_VEL_D_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_D_ACC), [MPC_Z_VEL_P_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_P_ACC), [MPC_Z_VEL_I_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_I_ACC), [MPC_Z_VEL_D_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_D_ACC)
@@ -144,7 +142,6 @@ Nuttx was upgraded from [8.2+ to NuttX 10.10.0+](https://github.com/apache/incub
- [**BACKPORT**] stm32:Ethernet Fix too big frames
- **Boot up stability** V5-V6X ensuring the LSE (RTC) oscillator is started
-
- [**BACKPORT**] stm32h7:lse fix Kconfig help text
- [**BACKPORT**] stm32f7:lse Use Kconfig values directly
- [**BACKPORT**] stm32h7:Add DBGMCU
@@ -164,7 +161,6 @@ Nuttx was upgraded from [8.2+ to NuttX 10.10.0+](https://github.com/apache/incub
:::
- **Driver changes**
-
- [**BACKPORT**] drivers/serial: fix Rx interrupt enable for cdcacm
- [**BACKPORT**] binnfmt:Fix return before close ELF fd
diff --git a/docs/zh/releases/1.16.md b/docs/zh/releases/1.16.md
index a8e81777c36..d7e44718b96 100644
--- a/docs/zh/releases/1.16.md
+++ b/docs/zh/releases/1.16.md
@@ -208,7 +208,7 @@ This release contains a major rework for the rover support in PX4:
- Generic Mecanum Rover `52000`.
- Library for the [pure pursuit guidance algorithm](../config_rover/position_tuning.md#pure-pursuit-guidance-logic-info-only) that is shared by all the rover modules.
- [Simulation](../frames_rover/index.md#simulation) for differential-steering and Ackermann rovers in gazebo (for release notes see `r1_rover` and `rover_ackermann` in [simulation](#simulation)).
-- Deprecation of the [rover position control](../frames_rover/rover_position_control.md) module: Note that the legacy rover module still exists but has been superseded by the new dedicated modules.
+- Deprecation of the `rover position control` module: Note that the legacy rover module still exists but has been superseded by the new dedicated modules.
### Infrastructure
diff --git a/docs/zh/ros/external_position_estimation.md b/docs/zh/ros/external_position_estimation.md
index 892c63fec44..b39bcb5bf9d 100644
--- a/docs/zh/ros/external_position_estimation.md
+++ b/docs/zh/ros/external_position_estimation.md
@@ -187,7 +187,7 @@ MAVROS has plugins to relay a visual estimation from a VIO or MoCap system using
You can use any of the above pipelines with LPE.
If you're working with EKF2, only the "vision" pipelines are supported.
-To use MoCap data with EKF2 you will have to [remap](http://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
+To use MoCap data with EKF2 you will have to [remap](https://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
- MoCap ROS topics of type `geometry_msgs/PoseStamped` or `geometry_msgs/PoseWithCovarianceStamped` must be remapped to `/mavros/vision_pose/pose`.
The `geometry_msgs/PoseStamped` topic is most common as MoCap doesn't usually have associated covariances to the data.
@@ -205,7 +205,7 @@ The local/world and world frames used by ROS and PX4 are different.
| 世界坐标系 | FRD or NED (X **N**orth, Y **E**ast, Z **D**own) | FLU or ENU (X **E**ast, Y **N**orth, Z **U**p), with the naming being `odom` or `map` |
:::tip
-See [REP105: Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
+See [REP105: Coordinate Frames for Mobile Platforms](https://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
:::
如果你把机体命名为 robot1,你会得到一个主题,比如 /vrpn_client_node/robot1/pose
@@ -236,7 +236,7 @@ You therefore have to add the external pose's body frame to the tf tree. This ca
```
Make sure that you change the values of yaw, pitch and roll such that it properly attaches the external pose's body frame to the `base_link` or `base_link_frd`.
-Have a look at the [tf package](http://wiki.ros.org/tf#static_transform_publisher) for further help on how to specify the transformation between the frames.
+Have a look at the [tf package](https://wiki.ros.org/tf#static_transform_publisher) for further help on how to specify the transformation between the frames.
You can use rviz to check if you attached the frame right. The name of the `external_pose_child_frame` has to match the child_frame_id of your `nav_msgs/Odometry` message.
The same also applies for the reference frame of the external pose. You have to attach the reference frame of the external pose as child to either the `odom` or `odom_frd` frame. Adapt therefore the following code line accordingly.
diff --git a/docs/zh/ros/mavros_installation.md b/docs/zh/ros/mavros_installation.md
index 29282bd6037..26add434e39 100644
--- a/docs/zh/ros/mavros_installation.md
+++ b/docs/zh/ros/mavros_installation.md
@@ -7,7 +7,7 @@ This documentation reflects the "old approach".
This documentation explains how to set up communication between the PX4 Autopilot and a ROS 1 enabled companion computer using MAVROS.
-[MAVROS](http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status) is a ROS 1 package that enables MAVLink extendable communication between computers running ROS 1 for any MAVLink enabled autopilot, ground station, or peripheral.
+[MAVROS](https://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status) is a ROS 1 package that enables MAVLink extendable communication between computers running ROS 1 for any MAVLink enabled autopilot, ground station, or peripheral.
_MAVROS_ is the "official" supported bridge between ROS 1 and the MAVLink protocol.
First we install PX4 and ROS, and then MAVROS.
@@ -26,10 +26,9 @@ They cover the _ROS Melodic and Noetic_ releases.
:::tab ROS Noetic (Ubuntu 20.04)
-If you're working with [ROS Noetic](http://wiki.ros.org/noetic) on Ubuntu 20.04:
+If you're working with [ROS Noetic](https://wiki.ros.org/noetic) on Ubuntu 20.04:
1. Install PX4 without the simulator toolchain:
-
1. [Download PX4 Source Code](../dev_setup/building_px4.md):
```sh
@@ -52,7 +51,7 @@ If you're working with [ROS Noetic](http://wiki.ros.org/noetic) on Ubuntu 20.04:
sudo apt-get install protobuf-compiler libeigen3-dev libopencv-dev -y
```
-3. Follow the [Noetic Installation instructions](http://wiki.ros.org/noetic/Installation/Ubuntu#Installation) (ros-noetic-desktop-full is recommended).
+3. Follow the [Noetic Installation instructions](https://wiki.ros.org/noetic/Installation/Ubuntu#Installation) (ros-noetic-desktop-full is recommended).
:::
@@ -81,7 +80,7 @@ If you're working with ROS "Melodic on Ubuntu 18.04:
- ROS Melodic is installed with Gazebo (Classic) 9 by default.
- Your catkin (ROS build system) workspace is created at **~/catkin_ws/**.
- - The script uses instructions from the ROS Wiki "Melodic" [Ubuntu page](http://wiki.ros.org/melodic/Installation/Ubuntu).
+ - The script uses instructions from the ROS Wiki "Melodic" [Ubuntu page](https://wiki.ros.org/melodic/Installation/Ubuntu).
:::
@@ -147,7 +146,6 @@ Now you are ready to do the build:
```
2. 安装MAVROS最新的版本:
-
- 发行版 / 稳定版
```sh
@@ -205,6 +203,6 @@ If you have an example app using the PX4 Autopilot and MAVROS, we can help you g
## See Also
-- [mavros ROS Package Summary](http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status)
+- [mavros ROS Package Summary](https://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status)
- [mavros source](https://github.com/mavlink/mavros/)
-- [ROS Melodic installation instructions](http://wiki.ros.org/melodic/Installation)
+- [ROS Melodic installation instructions](https://wiki.ros.org/melodic/Installation)
diff --git a/docs/zh/ros/mavros_offboard_cpp.md b/docs/zh/ros/mavros_offboard_cpp.md
index 316775b53d1..693004ab6f6 100644
--- a/docs/zh/ros/mavros_offboard_cpp.md
+++ b/docs/zh/ros/mavros_offboard_cpp.md
@@ -123,7 +123,7 @@ int main(int argc, char **argv)
```
The `mavros_msgs` package contains all of the custom messages required to operate services and topics provided by the MAVROS package.
-All services and topics as well as their corresponding message types are documented in the [mavros wiki](http://wiki.ros.org/mavros).
+All services and topics as well as their corresponding message types are documented in the [mavros wiki](https://wiki.ros.org/mavros).
```cpp
mavros_msgs::State current_state;
@@ -194,7 +194,7 @@ offb_set_mode.request.custom_mode = "OFFBOARD";
```
We set the custom mode to `OFFBOARD`.
-A list of [supported modes](http://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
+A list of [supported modes](https://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
```cpp
mavros_msgs::CommandBool arm_cmd;
diff --git a/docs/zh/ros/mavros_offboard_python.md b/docs/zh/ros/mavros_offboard_python.md
index 85e97d3279e..cd8617a10b9 100644
--- a/docs/zh/ros/mavros_offboard_python.md
+++ b/docs/zh/ros/mavros_offboard_python.md
@@ -155,7 +155,7 @@ if __name__ == "__main__":
## 代码解释
The `mavros_msgs` package contains all of the custom messages required to operate services and topics provided by the MAVROS package.
-All services and topics as well as their corresponding message types are documented in the [mavros wiki](http://wiki.ros.org/mavros).
+All services and topics as well as their corresponding message types are documented in the [mavros wiki](https://wiki.ros.org/mavros).
```py
import rospy
@@ -237,7 +237,7 @@ for i in range(100):
```
We prepare the message request used to set the custom mode to `OFFBOARD`.
-A list of [supported modes](http://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
+A list of [supported modes](https://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
```py
offb_set_mode = SetModeRequest()
diff --git a/docs/zh/ros/offboard_control.md b/docs/zh/ros/offboard_control.md
index 966b725d382..ddb3d1caff6 100644
--- a/docs/zh/ros/offboard_control.md
+++ b/docs/zh/ros/offboard_control.md
@@ -40,8 +40,7 @@ Enable MAVLink on the serial port that you connect to the companion computer (se
参考电台包括:
- - [Lairdtech RM024](http://www.lairdtech.com/products/rm024)
- - [Digi International XBee Pro](http://www.digi.com/products/xbee-rf-solutions/modules)
+ - [Digi International XBee Pro](https://www.digi.com/products/embedded-systems/digi-xbee/rf-modules/sub-1-ghz-rf-modules)
[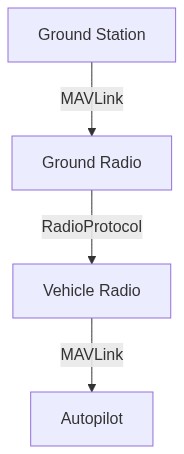](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoiZ3JhcGggVEQ7XG4gIGduZFtHcm91bmQgU3RhdGlvbl0gLS1NQVZMaW5rLS0-IHJhZDFbR3JvdW5kIFJhZGlvXTtcbiAgcmFkMSAtLVJhZGlvUHJvdG9jb2wtLT4gcmFkMltWZWhpY2xlIFJhZGlvXTtcbiAgcmFkMiAtLU1BVkxpbmstLT4gYVtBdXRvcGlsb3RdOyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
@@ -54,7 +53,7 @@ graph TD;
### 板载处理器
-在飞行器上部署一台小型将计算机,用 UART 转 USB 适配器连接飞控。
+A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ethernet port.
这里有许多可能性,这将取决于您除了向自驾仪发送指令外,还想要做什么样的额外机载处理。
Some examples are provided in [Companion Computers](../companion_computer/index.md#companion-computer-options).
diff --git a/docs/zh/ros/raspberrypi_installation.md b/docs/zh/ros/raspberrypi_installation.md
index fda1b667ce1..313dd80fa57 100644
--- a/docs/zh/ros/raspberrypi_installation.md
+++ b/docs/zh/ros/raspberrypi_installation.md
@@ -5,11 +5,11 @@
## 系统必备组件
- 具有显示器、键盘或配置 ssh 连接的工作树莓派
-- 本指南假定您的 RPi 上安装了 Raspbian "JESSIE"。 如果没有:[安装它](https://www.raspberrypi.org/downloads/raspbian/) ,或者将你的树莓派操作系统Raspbian Wheezy [升级](http://raspberrypi.stackexchange.com/questions/27858/upgrade-to-raspbian-jessie)至Jessie版本。
+- 本指南假定您的 RPi 上安装了 Raspbian "JESSIE"。 If not: [install it](https://www.raspberrypi.org/downloads/raspbian/) or [upgrade](https://raspberrypi.stackexchange.com/questions/27858/upgrade-to-raspbian-jessie) your Raspbian Wheezy to Jessie.
## 安装
-请遵循[本指南](http://wiki.ros.org/ROSberryPi/Installing%20ROS%20Indigo%20on%20Raspberry%20Pi)来实际安装ROS Indigo。 注意:安装 "ROS-Comm" 变体。 桌面变体太臃肿了。
+Follow [this guide](https://wiki.ros.org/ROSberryPi/Installing%20ROS%20Indigo%20on%20Raspberry%20Pi) for the actual installation of ROS Indigo. 注意:安装 "ROS-Comm" 变体。 桌面变体太臃肿了。
### 安装程序包时出错
diff --git a/docs/zh/ros2/index.md b/docs/zh/ros2/index.md
index e1e604bd396..25e075eaf83 100644
--- a/docs/zh/ros2/index.md
+++ b/docs/zh/ros2/index.md
@@ -6,7 +6,7 @@
Tip
The PX4 development team highly recommend that you use/migrate to this version of ROS!
-This is the newest version of [ROS](http://www.ros.org/) (Robot Operating System).
+This is the newest version of [ROS](https://www.ros.org/) (Robot Operating System).
It significantly improves on ROS "1", and in particular allows a much deeper and lower-latency integration with PX4.
:::
diff --git a/docs/zh/ros2/user_guide.md b/docs/zh/ros2/user_guide.md
index 1cd2e647530..829065dc5ad 100644
--- a/docs/zh/ros2/user_guide.md
+++ b/docs/zh/ros2/user_guide.md
@@ -444,7 +444,7 @@ The local/world and body frames used by ROS and PX4 are different.
| 世界坐标系 | FRD or NED (X **N**orth, Y **E**ast, Z **D**own) | FLU or ENU (X **E**ast, Y **N**orth, Z **U**p) |
:::tip
-See [REP105: Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
+See [REP105: Coordinate Frames for Mobile Platforms](https://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
:::
如果你把机体命名为 robot1,你会得到一个主题,比如 /vrpn_client_node/robot1/pose
@@ -455,7 +455,6 @@ The FRD (NED) conventions are adopted on **all** PX4 topics unless explicitly sp
Therefore, ROS 2 nodes that want to interface with PX4 must take care of the frames conventions.
- To rotate a vector from ENU to NED two basic rotations must be performed:
-
- first a pi/2 rotation around the `Z`-axis (up),
- then a pi rotation around the `X`-axis (old East/new North).
diff --git a/docs/zh/sensor/lidar_lite.md b/docs/zh/sensor/lidar_lite.md
index fb03f54f442..c4ae26f23eb 100644
--- a/docs/zh/sensor/lidar_lite.md
+++ b/docs/zh/sensor/lidar_lite.md
@@ -35,7 +35,7 @@ This is currently (Q4/2015) under investigation by the manufacturer and potentia
The recommended robust setup is a v1 device interfaced via PWM.
:::
-The standard wiring instructions for Lidar-Lite 3 (from the [Operation Manual](http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf)) are shown below.
+The standard wiring instructions for Lidar-Lite 3 (from the [Operation Manual](https://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf)) are shown below.
Lidar-Lite v2 and v3 are the same, except that the order of pins in the connector is reversed (i.e. it is as though the connector was turned over).

@@ -83,4 +83,4 @@ If missing, you would also need to add the driver (`drivers/ll40ls`) to the boar
## 更多信息
-- [LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf](http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf) (Garmin)
+- [LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf](https://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf) (Garmin)
diff --git a/docs/zh/sensor/pmw3901.md b/docs/zh/sensor/pmw3901.md
index 28a3f03bfe4..5737edb5cd3 100644
--- a/docs/zh/sensor/pmw3901.md
+++ b/docs/zh/sensor/pmw3901.md
@@ -55,7 +55,7 @@ The diagram shows the relative board and vehicle orientations that correspond to
The diagram above shows the Bitcraze board.
You can use the notch to find the orientation of the other boards in the same way:
-| | |
+| | |
| ---------------------------------------------------- | ----------------------------------------------------------------------------------------------- |
| Tindie
![PMW3901 Tindie Notch][tindie_notch] | Hex Hereflow
![PMW3901 Hereflow Notch][hereflow_notch] |
| Thone
![PMW3901 Thoneflow Notch][thoneflow_notch] | Alientek (also has an arrow indicating the front!)
![PMW3901 Alientek Notch][alientek_notch] |
@@ -150,7 +150,7 @@ A screenshot showing the I2C pins (SLA, SLC, GND, and VCC) is provided below.
## Hex HereFlow PMW3901 Optical Flow Sensor
-The Hex [HereFlow PMW3901 Optical Flow Sensor](http://www.proficnc.com/all-products/185-pixhawk2-suite.html) is a tiny board containing the PMW3901 flow module, VL53L1X distance sensor, and an IMU (used to synchronize the flow data with the gyro data).
+The Hex [HereFlow PMW3901 Optical Flow Sensor](https://docs.cubepilot.org/user-guides/flow-senor/here-flow) is a tiny board containing the PMW3901 flow module, VL53L1X distance sensor, and an IMU (used to synchronize the flow data with the gyro data).
An onboard microcontroller samples the three sensors and publishes two DroneCAN messages containing all the information needed for the flow and distance sensor calculations.
@@ -160,9 +160,7 @@ As for the other optical flow boards, we recommend that you use an [external dis
[PX4 configuration](#px4-configuration) and [mounting/orientation](#mounting-orientation) instructions are provided above.
-
-
-### DroneCAN Wiring/Setup
+### DroneCAN Wiring/Setup {#dronecan_wiring}
The diagram below shows how to connect the sensor to the Pixhawk 4 CAN bus.
diff --git a/docs/zh/sensor/sfxx_lidar.md b/docs/zh/sensor/sfxx_lidar.md
index e2b05b3de2f..390e52128ac 100644
--- a/docs/zh/sensor/sfxx_lidar.md
+++ b/docs/zh/sensor/sfxx_lidar.md
@@ -20,13 +20,13 @@ Discontinued
The following models are supported by PX4 but are no longer available from the manufacturer.
-| Model | 范围 | Bus | |
-| -------------------------------------------------------------------------------------------------- | ---- | ------------- | ---------------------------------------------------------------------------------- |
-| [SF02](http://documents.lightware.co.za/SF02%20-%20Laser%20Rangefinder%20Manual%20-%20Rev%208.pdf) | 50 | Serial | |
-| [SF10/A](http://documents.lightware.co.za/SF10%20-%20Laser%20Altimeter%20Manual%20-%20Rev%206.pdf) | 25 | Serial or I2C | |
-| [SF10/B](http://documents.lightware.co.za/SF10%20-%20Laser%20Altimeter%20Manual%20-%20Rev%206.pdf) | 50 | Serial or I2C | |
-| SF10/C | 100m | Serial or I2C | |
-| LW20/B | 50 | I2C bus | Waterproofed (IP67) with servo for sense-and-avoid applications |
+| Model | 范围 | Bus | |
+| --------------------------------------------------------------------------------------------------- | ---- | ------------- | ---------------------------------------------------------------------------------- |
+| [SF02](https://documents.lightware.co.za/SF02%20-%20Laser%20Rangefinder%20Manual%20-%20Rev%208.pdf) | 50 | Serial | |
+| [SF10/A](https://documents.lightware.co.za/SF10%20-%20Laser%20Altimeter%20Manual%20-%20Rev%206.pdf) | 25 | Serial or I2C | |
+| [SF10/B](https://documents.lightware.co.za/SF10%20-%20Laser%20Altimeter%20Manual%20-%20Rev%206.pdf) | 50 | Serial or I2C | |
+| SF10/C | 100m | Serial or I2C | |
+| LW20/B | 50 | I2C bus | Waterproofed (IP67) with servo for sense-and-avoid applications |
:::
diff --git a/docs/zh/sim_flightgear/index.md b/docs/zh/sim_flightgear/index.md
index 21291cce018..569292be93e 100644
--- a/docs/zh/sim_flightgear/index.md
+++ b/docs/zh/sim_flightgear/index.md
@@ -7,8 +7,8 @@ It may or may not work with current versions of PX4.
See [Toolchain Installation](../dev_setup/dev_env.md) for information about the environments and tools supported by the core development team.
:::
-[FlightGear](https://www.flightgear.org/) is a flight simulator with powerful [FDM engines](http://wiki.flightgear.org/Flight_Dynamics_Model).
-This allows FlightGear to simulate rotorcrafts under various meteorological conditions (which is why the bridge was originally developed by [ThunderFly s.r.o.](https://www.thunderfly.cz/)).
+[FlightGear](https://wiki.flightgear.org/Flight_Dynamics_Model) is a flight simulator with powerful [FDM engines](https://wiki.flightgear.org/Flight_Dynamics_Model).
+This allows FlightGear to simulate rotorcraft under various meteorological conditions (which is why the bridge was originally developed by [ThunderFly s.r.o.](https://www.thunderfly.cz/)).
This page describes FlightGear's single-vehicle use in SITL.
For information about multi-vehicle use see: [Multi-Vehicle Simulation with FlightGear](../sim_flightgear/multi_vehicle.md).
@@ -191,7 +191,7 @@ Takeoff location in SITL FlightGear can be set using additional variables.
Setting the variable will override the default takeoff location.
The variables which can be set are as follows: `--airport`, `--runway`, and `--offset-distance`.
-Other options can be found on [FlightGear wiki](http://wiki.flightgear.org/Command_line_options#Initial_Position_and_Orientation)
+Other options can be found on [FlightGear wiki](https://wiki.flightgear.org/Command_line_options#Initial_Position_and_Orientation)
例如:
@@ -199,7 +199,7 @@ Other options can be found on [FlightGear wiki](http://wiki.flightgear.org/Comma
FG_ARGS_EX="--airport=PHNL" make px4_sitl_nolockstep flightgear_rascal
```
-The example above starts the simulation on the [Honolulu international airport](http://wiki.flightgear.org/Suggested_airports)
+The example above starts the simulation on the [Honolulu international airport](https://wiki.flightgear.org/Suggested_airports)
### Using a Joystick
diff --git a/docs/zh/sim_flightgear/vehicles.md b/docs/zh/sim_flightgear/vehicles.md
index e56e0eb770d..b830152037d 100644
--- a/docs/zh/sim_flightgear/vehicles.md
+++ b/docs/zh/sim_flightgear/vehicles.md
@@ -25,7 +25,7 @@ The most suitable one for UAV development is currently the [Rascal RC plane](htt

-The variants differ mainly by the [FDM](http://wiki.flightgear.org/Flight_Dynamics_Model) model.
+The variants differ mainly by the [FDM](https://wiki.flightgear.org/Flight_Dynamics_Model) model.
All variants have a common feature selection table that can be activated by pressing the `=` key on the computer keyboard.
There is a pop-up table that could be used for advanced features activation.
@@ -119,7 +119,7 @@ The file content meaning is as follows:
- `FgModel` - a precise case sensitive name of the FlightGear model corresponding to "XXXX-set.xml" in the model directory (where XXXX is the model name).
- `Url` is optional and it is not currently used. It is intended for future use to auto-download the models from web
-- `Controls` - the most important part of the process of adding a vehicle. This section contains the mapping between the PX4 mixer file and [FlightGear property tree](http://wiki.flightgear.org/Property_tree).
+- `Controls` - the most important part of the process of adding a vehicle. This section contains the mapping between the PX4 mixer file and [FlightGear property tree](https://wiki.flightgear.org/Property_tree).
- The first number in a list selects a PX4 mixer output.
- Path string is a FlightGear variable location in the property tree.
- The last number in a list is a multiplier, allowing inversion or scaling of mixer input.
diff --git a/docs/zh/sim_gazebo_classic/index.md b/docs/zh/sim_gazebo_classic/index.md
index 8d02efb7eaa..a2da594529f 100644
--- a/docs/zh/sim_gazebo_classic/index.md
+++ b/docs/zh/sim_gazebo_classic/index.md
@@ -46,8 +46,6 @@ Note that `aptitude` is needed because it can resolve dependency conflicts (by r
:::tip
You could also modify the installation script to install Gazebo Classic on Ubuntu 22.04 before it is run for the first time.
-
-Additional installation instructions can be found on [gazebosim.org](http://gazebosim.org/tutorials?cat=guided_b&tut=guided_b1).
:::
## Running the Simulation
@@ -120,7 +118,7 @@ INFO [simulator] Waiting for simulator to connect on TCP port 4560
Gazebo multi-robot simulator, version 9.0.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
-http://gazebosim.org
+https://gazebosim.org/home
...
INFO [ecl/EKF] 5188000: commencing GPS fusion
```
diff --git a/docs/zh/sim_gazebo_classic/multi_vehicle_simulation.md b/docs/zh/sim_gazebo_classic/multi_vehicle_simulation.md
index bf991827e30..722bfd7a309 100644
--- a/docs/zh/sim_gazebo_classic/multi_vehicle_simulation.md
+++ b/docs/zh/sim_gazebo_classic/multi_vehicle_simulation.md
@@ -108,7 +108,7 @@ You can then control the vehicles with _QGroundControl_ and MAVROS in a similar
### Required
-- Current [PX4 ROS/Gazebo development environment](../ros/mavros_installation.md) (which includes the [MAVROS package](http://wiki.ros.org/mavros)).
+- Current [PX4 ROS/Gazebo development environment](../ros/mavros_installation.md) (which includes the [MAVROS package](https://wiki.ros.org/mavros)).
- a clone of latest [PX4/PX4-Autopilot](https://github.com/PX4/PX4-Autopilot)
### Build and Test
@@ -234,7 +234,6 @@ To add a third iris to this simulation there are two main components to consider
- select a different port for `mavlink_udp_port` arg for communication with Gazebo Classic
- selects ports for MAVROS communication by modifying both port numbers in the `fcu_url` arg
- create a startup file, and change the file as follows:
-
- make a copy of an existing iris rcS startup file (`iris_1` or `iris_2`) and rename it `iris_3`
- `MAV_SYS_ID` value to `3`
- `SITL_UDP_PRT` value to match that of the `mavlink_udp_port` launch file arg
@@ -275,7 +274,6 @@ This method is similar to using the xacro except that the SITL/Gazebo Classic po
To add a new vehicle, you need to make sure the model can be found (in order to spawn it in Gazebo Classic), and PX4 needs to have an appropriate corresponding startup script.
1. You can choose to do either of:
-
- modify the **single_vehicle_spawn_sdf.launch** file to point to the location of your model by changing the line below to point to your model:
```sh
@@ -298,5 +296,5 @@ To add a new vehicle, you need to make sure the model can be found (in order to
## Additional Resources
- See [Simulation](../simulation/index.md) for a description of the UDP port configuration.
-- See [URDF in Gazebo](http://wiki.ros.org/urdf/Tutorials/Using%20a%20URDF%20in%20Gazebo) for more information about spawning the model with xacro.
+- See [URDF in Gazebo](https://wiki.ros.org/urdf/Tutorials/Using%20a%20URDF%20in%20Gazebo) for more information about spawning the model with xacro.
- See [RotorS](https://github.com/ethz-asl/rotors_simulator/tree/master/rotors_description/urdf) for more xacro models.
diff --git a/docs/zh/sim_gazebo_classic/octomap.md b/docs/zh/sim_gazebo_classic/octomap.md
index 2fb8b278523..3e602f6505e 100644
--- a/docs/zh/sim_gazebo_classic/octomap.md
+++ b/docs/zh/sim_gazebo_classic/octomap.md
@@ -1,6 +1,6 @@
# OctoMap 3D Models with ROS/Gazebo Classic
-The [OctoMap library](http://octomap.github.io/) is an open source library for generating volumetric 3D environment models from sensor data.
+The [OctoMap library](https://octomap.github.io/) is an open source library for generating volumetric 3D environment models from sensor data.
This model data can then be used by a drone for navigation and obstacle avoidance.
This guide covers how to use _OctoMap_ with the [Gazebo Classic](../sim_gazebo_classic/index.md) [Rotors Simulator](https://github.com/ethz-asl/rotors_simulator/wiki/RotorS-Simulator) and ROS.
diff --git a/docs/zh/sim_jsbsim/index.md b/docs/zh/sim_jsbsim/index.md
index 46baed6213c..ff5e88316a5 100644
--- a/docs/zh/sim_jsbsim/index.md
+++ b/docs/zh/sim_jsbsim/index.md
@@ -7,7 +7,7 @@ It may or may not work with current versions of PX4.
See [Toolchain Installation](../dev_setup/dev_env.md) for information about the environments and tools supported by the core development team.
:::
-[JSBSim](http://jsbsim.sourceforge.net/index.html) is a open source flight simulator ("flight dynamics model (FDM)") that runs on Microsoft Windows, Apple Macintosh, Linux, IRIX, Cygwin (Unix on Windows), etc.
+[JSBSim](https://jsbsim.sourceforge.net/index.html) is a open source flight simulator ("flight dynamics model (FDM)") that runs on Microsoft Windows, Apple Macintosh, Linux, IRIX, Cygwin (Unix on Windows), etc.
Its features include: fully configurable aerodynamics and a propulsion system that can model complex flight dynamics of an aircraft.
Rotational earth effects are also modeled into the dynamics.
diff --git a/docs/zh/sim_sih/index.md b/docs/zh/sim_sih/index.md
index 473bbfcd95b..e96d0b6afca 100644
--- a/docs/zh/sim_sih/index.md
+++ b/docs/zh/sim_sih/index.md
@@ -23,10 +23,11 @@ The Desktop computer is only used to display the virtual vehicle.
### Compatibility
- SIH is compatible with all PX4 supported boards except those based on FMUv2.
-- SIH for quadrotor is supported from PX4 v1.9.
-- SIH for fixed-wing (airplane) and VTOL tailsitter are supported from PX4 v1.13.
+- SIH for MC quadrotor is supported from PX4 v1.9.
+- SIH for FW (airplane) and VTOL tailsitter are supported from PX4 v1.13.
- SIH as SITL (without hardware) from PX4 v1.14.
- SIH for Standard VTOL from PX4 v1.16.
+- SIH for MC Hexacopter X from `main` (expected to be PX4 v1.17).
### Benefits
@@ -43,12 +44,90 @@ SIH provides several benefits over HITL:
To run the SIH, you will need a:
-- [Flight controller](../flight_controller/index.md), such as a Pixhawk-series board
+- [Flight controller](../flight_controller/index.md), such as a Pixhawk-series board.
+
+ ::: info
+ From PX4 v1.14 you can run [SIH "as SITL"](#sih-as-sitl-no-fc), in which case a flight controller is not required.
+
+:::
+
- [Manual controller](../getting_started/px4_basic_concepts.md#manual-control): either a [radio control system](../getting_started/rc_transmitter_receiver.md) or a [joystick](../config/joystick.md).
+
- QGroundControl for flying the vehicle via GCS.
+
- Development computer for visualizing the virtual vehicle (optional).
-From PX4 v1.14 you can run SIH "as SITL", in which case a flight controller is not required.
+## Check if SIH is in Firmware
+
+The modules required for SIH are built into most PX4 firmware by default.
+These include: [`pwm_out_sim`](../modules/modules_driver.md#pwm-out-sim), [`sensor_baro_sim`](../modules/modules_system.md#sensor-baro-sim), [`sensor_gps_sim`](../modules/modules_system.md#sensor-gps-sim) and [`sensor_mag_sim`](../modules/modules_system.md#sensor-mag-sim).
+
+To check that these are present on your flight controller:
+
+1. Start QGroundControl.
+
+2. Open **Analyze Tools > Mavlink Console**.
+
+3. Enter the following commands in the console:
+
+ ```sh
+ pwm_out_sim status
+ ```
+
+ ```sh
+ sensor_baro_sim status
+ ```
+
+ ```sh
+ sensor_gps_sim status
+ ```
+
+ ```sh
+ sensor_mag_sim status
+ ```
+
+ ::: tip
+ Note that when using SIH on real hardware you do not need to additionally enable the modules using their corresponding parameters ([SENS_EN_GPSSIM](../advanced_config/parameter_reference.md#SENS_EN_GPSSIM), [SENS_EN_BAROSIM](../advanced_config/parameter_reference.md#SENS_EN_BAROSIM), [SENS_EN_MAGSIM](../advanced_config/parameter_reference.md#SENS_EN_MAGSIM)).
+
+:::
+
+4. If a valid status is returned you can start using SIH.
+
+If any of the returned values above are `nsh: MODULENAME: command not found`, then you don't have the module installed.
+In this case you will have to add them to your board configuration and then rebuild and install the firmware.
+
+### Adding SIH to the Firmware
+
+Add the following key to the configuration file for your flight controller to include all the required modules (for an example see [boards/px4/fmu-v6x/default.px4board](https://github.com/PX4/PX4-Autopilot/blob/main/boards/px4/fmu-v6x/default.px4board)).
+Then re-build the firmware and flash it to the board.
+
+```text
+CONFIG_MODULES_SIMULATION_SIMULATOR_SIH=y
+```
+
+:::details
+What does this do?
+
+This installs the dependencies in [simulator_sih/Kconfig](https://github.com/PX4/PX4-Autopilot/blob/main/src/modules/simulation/simulator_sih/Kconfig).
+It is equivalent to:
+
+```text
+CONFIG_MODULES_SIMULATION_PWM_OUT_SIM=y
+CONFIG_MODULES_SIMULATION_SENSOR_BARO_SIM=y
+CONFIG_MODULES_SIMULATION_SENSOR_GPS_SIM=y
+CONFIG_MODULES_SIMULATION_SENSOR_MAG_SIM=y
+```
+
+:::
+
+As an alterative to updating configuration files manually, you can use the following command to launch a GUI configuration tool, and interactively enable the required modules at the path: **modules > Simulation > simulator_sih**.
+For example, to update the fmu-v6x configuration you would use:
+
+```sh
+make px4_fmu-v6x boardconfig
+```
+
+After uploading, check that the required modules are present.
## Starting SIH
@@ -58,7 +137,7 @@ To set up/start SIH:
2. Open QGroundControl and wait for the flight controller too boot and connect.
3. Open [Vehicle Setup > Airframe](../config/airframe.md) then select the desired frame:
- [SIH Quadcopter X](../airframes/airframe_reference.md#copter_simulation_sih_quadcopter_x)
- - SIH Hexacopter X currently only has an airframe for SITL to safe flash so on flight control hardware it has to be manually configured equivalently.
+ - **SIH Hexacopter X** (currently only has an airframe for SITL to safe flash so on flight control hardware it has to be manually configured equivalently).
- [SIH plane AERT](../airframes/airframe_reference.md#plane_simulation_sih_plane_aert)
- [SIH Tailsitter Duo](../airframes/airframe_reference.md#vtol_simulation_sih_tailsitter_duo)
- [SIH Standard VTOL QuadPlane](../airframes/airframe_reference.md#vtol_simulation_sih_standard_vtol_quadplane)
@@ -116,7 +195,6 @@ To run SIH as SITL:
1. Install the [PX4 Development toolchain](../dev_setup/dev_env.md).
2. Run the appropriate make command for each vehicle type (at the root of the PX4-Autopilot repository):
-
- Quadcopter
```sh
@@ -242,7 +320,7 @@ For specific examples see the `_sihsim_` airframes in [ROMFS/px4fmu_common/init.
The dynamic models for the various vehicles are:
-- Quadcopter: [pdf report](https://github.com/PX4/PX4-user_guide/raw/main/assets/simulation/SIH_dynamic_model.pdf).
+- Quadcopter: [pdf report](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/simulation/SIH_dynamic_model.pdf).
- Hexacopter: Equivalent to the Quadcopter but with a symmetric hexacopter x actuation setup.
- Fixed-wing: Inspired by the PhD thesis: "Dynamics modeling of agile fixed-wing unmanned aerial vehicles." Khan, Waqas, supervised by Nahon, Meyer, McGill University, PhD thesis, 2016.
- Tailsitter: Inspired by the master's thesis: "Modeling and control of a flying wing tailsitter unmanned aerial vehicle." Chiappinelli, Romain, supervised by Nahon, Meyer, McGill University, Masters thesis, 2018.
@@ -257,7 +335,9 @@ SIH was originally developed by Coriolis g Corporation.
The airplane model and tailsitter models were added by Altitude R&D inc.
Both are Canadian companies:
-- Coriolis g developped a new type of Vertical Takeoff and Landing (VTOL) vehicles based on passive coupling systems;
+- Coriolis g developed a new type of Vertical Takeoff and Landing (VTOL) vehicles based on passive coupling systems;
- [Altitude R&D](https://www.altitude-rd.com/) is specialized in dynamics, control, and real-time simulation (today relocated in Zurich).
The simulator is released for free under BSD license.
+
+
diff --git a/docs/zh/simulation/community_supported_simulators.md b/docs/zh/simulation/community_supported_simulators.md
index 0fcc37a3c9a..ce1b33857d9 100644
--- a/docs/zh/simulation/community_supported_simulators.md
+++ b/docs/zh/simulation/community_supported_simulators.md
@@ -18,4 +18,4 @@ Questions about these tools should be raised on the [discussion forums](../contr
| [FlightGear](../sim_flightgear/index.md) | A simulator that provides physically and visually realistic simulations. In particular it can simulate many weather conditions, including thunderstorms, snow, rain and hail, and can also simulate thermals and different types of atmospheric flows. [Multi-vehicle simulation](../sim_flightgear/multi_vehicle.md) is also supported.
Supported Vehicles: Plane, Autogyro, Rover
|
| [JMAVSim](../sim_jmavsim/index.md) | A simple multirotor/quad simulator. This was previously part of the PX4 development toolchain but was removed in favour of [Gazebo](../sim_gazebo_gz/index.md).
Supported Vehicles: Quad
|
| [JSBSim](../sim_jsbsim/index.md) | A simulator that provides advanced flight dynamics models. This can be used to model realistic flight dynamics based on wind tunnel data.
Supported Vehicles: Plane, Quad, Hex
|
-| [AirSim](../sim_airsim/index.md) | A cross platform simulator that provides physically and visually realistic simulations. This simulator is resource intensive, and requires a very significantly more powerful computer than the other simulators described here.
Supported Vehicles: Iris (MultiRotor model and a configuration for PX4 QuadRotor in the X configuration).
|
+| [AirSim](../sim_airsim/index.md) | A cross platform simulator that provides physically and visually realistic simulations. This simulator is resource intensive, and requires a significantly more powerful computer than the other simulators described here.
Supported Vehicles: Iris (MultiRotor model and a configuration for PX4 QuadRotor in the X configuration).
|
diff --git a/docs/zh/simulation/hitl.md b/docs/zh/simulation/hitl.md
index 7b93a70285b..7edad92be5f 100644
--- a/docs/zh/simulation/hitl.md
+++ b/docs/zh/simulation/hitl.md
@@ -22,7 +22,6 @@ PX4 支持多轴( [jMAVSim](../sim_jmavsim/index.md)或[Gazebo Classic](../sim_g
| ---------------------------------------------------------------------------------------------------------------- | --------------- | -------------- | ------- |
| [HIL Quadcopter X](../airframes/airframe_reference.md#copter_simulation_hil_quadcopter_x) | 1002 | Y | Y |
| [HIL Standard VTOL QuadPlane](../airframes/airframe_reference.md#vtol_standard_vtol_hil_standard_vtol_quadplane) | 4001 | Y | |
-| [Generic Quadrotor x](../airframes/airframe_reference.md#copter_quadrotor_x_generic_quadcopter) copter | 4011 | Y | Y |
@@ -34,7 +33,7 @@ The simulator acts as gateway to share MAVLink data between PX4 and _QGroundCont
:::info
The simulator can also be connected via UDP if the flight controller has networking support and uses a stable, low-latency connection (e.g. a wired Ethernet connection - WiFi is usually not sufficiently reliable).
-For example, this configuration has been tested with PX4 running on a Raspberry Pi connected via Ethernet to the computer (a startup configuration that includes the command for running jMAVSim can be found [here](https://github.com/PX4/PX4-Autopilot/blob/main/posix-configs/rpi/px4_hil.config)).
+For example, this configuration has been tested with PX4 running on a Raspberry Pi connected via Ethernet to the computer (a startup configuration that includes the command for running jMAVSim can be found in [px4_hil.config](https://github.com/PX4/PX4-Autopilot/blob/main/posix-configs/rpi/px4_hil.config)).
:::
The diagram below shows the simulation environment:
@@ -60,34 +59,59 @@ Core modules like commander and sensors have HITL modes at startup that bypass s
## 配置 HITL
+## Check if HITL is in Firmware
+
+The module required for HITL ([`pwm_out_sim`](../modules/modules_driver.md#pwm-out-sim)) is not built into all PX4 firmware by default.
+
+To check if the module is present on your Flight Controller:
+
+1. Open QGroundControl
+
+2. Open **Analyze Tools > Mavlink Console**.
+
+3. Type the following command in the console:
+
+ ```sh
+ pwm_out_sim status
+ ```
+
+4. If the returned value is `nsh: pwm_out_sim: command not found`, then you don't have the module installed.
+
+If `pwm_out_sim` is not present you will need to add it to the firmware in order to use HITL simulation.
+
+### Adding HITL modules to the Firmware
+
+Add the following key to the configuration file for your flight controller to include the required module (for an example see [boards/px4/fmu-v6x/default.px4board](https://github.com/PX4/PX4-Autopilot/blob/main/boards/px4/fmu-v6x/default.px4board)).
+Then re-build the firmware and flash it to the board.
+
+```text
+CONFIG_MODULES_SIMULATION_PWM_OUT_SIM=y
+```
+
+You can alternatively use the following command to launch a GUI configuration tool, and interactively enable them at the path: **modules > Simulation > pwm_out_sim**.
+For example, to update fmu-v6x you would use:
+
+```sh
+make px4_fmu-v6x boardconfig
+```
+
### PX4 配置
1. Connect the autopilot directly to _QGroundControl_ via USB.
-2. 激活 HITL 模式
-
- 1. Open **Setup > Safety** section.
- 2. Enable HITL mode by selecting **Enabled** from the _HITL Enabled_ list:
-
- 
-
-3. 选择机架
-
+2. 选择机架
1. Open **Setup > Airframes**
2. Select a [compatible airframe](#compatible_airframe) you want to test.
Then click **Apply and Restart** on top-right of the _Airframe Setup_ page.
- 
-
-4. 如有必要, 校准您的 RC 遥控器 或操纵杆。
-
-5. 设置 UDP
+3. 如有必要, 校准您的 RC 遥控器 或操纵杆。
+4. 设置 UDP
1. Under the _General_ tab of the settings menu, uncheck all _AutoConnect_ boxes except for **UDP**.

-6. (可选) 配置操纵杆和故障保护。
+5. (可选) 配置操纵杆和故障保护。
Set the following [parameters](../advanced_config/parameters.md) in order to use a joystick instead of an RC remote control transmitter:
- [COM_RC_IN_MODE](../advanced_config/parameter_reference.md#COM_RC_IN_MODE) to "Joystick/No RC Checks". 这允许操纵杆输入并禁用 RC 输入检查。
diff --git a/docs/zh/software_update/stm32_bootloader.md b/docs/zh/software_update/stm32_bootloader.md
index ed6bfa9d17c..8bce27a4163 100644
--- a/docs/zh/software_update/stm32_bootloader.md
+++ b/docs/zh/software_update/stm32_bootloader.md
@@ -1,6 +1,6 @@
# STM32 Bootloader
-The code for the PX4 bootloader is available from the Github [Bootloader](https://github.com/px4/bootloader) repository.
+The code for the PX4 bootloader is available from the Github [Bootloader](https://github.com/PX4/PX4-Bootloader) repository.
## 支持的飞控板
@@ -14,7 +14,7 @@ The code for the PX4 bootloader is available from the Github [Bootloader](https:
## 构建 Bootloader
```sh
-git clone https://github.com/PX4/Bootloader.git
+git clone https://github.com/PX4/PX4-Bootloader.git
cd Bootloader
git submodule init
git submodule update
@@ -29,7 +29,7 @@ make
The right power sequence is critical for some boards to allow JTAG / SWD access. 其他 JTAG 仿真器需要不同但相似的步骤。
:::
-The instructions below are valid for a Blackmagic / Dronecode probe.
+The instructions below are valid for a Blackmagic / Zubax BugFace BF1 probe.
Other JTAG probes will need different but similar steps.
Developers attempting to flash the bootloader should have the required knowledge.
If you do not know how to do this you probably should reconsider if you really need to change anything about the bootloader.
@@ -40,7 +40,7 @@ If you do not know how to do this you probably should reconsider if you really n
2. 连接 USB 电源线
3. 连接 JTAG 电缆
-### 黑魔法/无人机探测器
+### Black Magic / Zubax BugFace BF1 Probe
#### 使用正确的串行端口
diff --git a/docs/zh/telemetry/ark_microhard_serial.md b/docs/zh/telemetry/ark_microhard_serial.md
index 399b50e266c..95054c6ef9e 100644
--- a/docs/zh/telemetry/ark_microhard_serial.md
+++ b/docs/zh/telemetry/ark_microhard_serial.md
@@ -1,6 +1,6 @@
# ARK Electron Microhard Serial Telemetry Radios
-_ARK Electron Microhard Serial Telemetry Radios_ integrate the [Microhard Pico Serial](http://microhardcorp.com/P900.php) P900 RF module.
+_ARK Electron Microhard Serial Telemetry Radios_ integrate the [Microhard Pico Serial](https://microhardcorp.com/P900.php) P900 RF module.
This can be used to enable MAVLink communication between a radio on a vehicle and a GCS.
Microhard Pico Serial radios are (up to) 1 Watt output radios that support point to point, point to multi-point, and mesh modes.
diff --git a/docs/zh/telemetry/crsf_telemetry.md b/docs/zh/telemetry/crsf_telemetry.md
index 37cc7b10c20..90786125d6d 100644
--- a/docs/zh/telemetry/crsf_telemetry.md
+++ b/docs/zh/telemetry/crsf_telemetry.md
@@ -163,7 +163,7 @@ Transmitter modules:
Receivers:
-- [TBS Crossfire Nano RX](http://team-blacksheep.com/products/prod:crossfire_nano_rx) - designed for small quadcopters.
+- [TBS Crossfire Nano RX](https://www.team-blacksheep.com/products/prod:crossfire_nano_rx) - designed for small quadcopters.
## ExpressLRS Radio Systems
@@ -176,7 +176,7 @@ Transmitter modules:
Receivers:
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24).
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24).
::: info
This is used in the [Reptile Dragon 2 Build Log](../frames_plane/reptile_dragon_2.md).
diff --git a/docs/zh/telemetry/esp8266_wifi_module.md b/docs/zh/telemetry/esp8266_wifi_module.md
index 983f29fd9d2..a1357050ff3 100644
--- a/docs/zh/telemetry/esp8266_wifi_module.md
+++ b/docs/zh/telemetry/esp8266_wifi_module.md
@@ -28,7 +28,7 @@ Modules that accept 5.0V supply:
A plug and play ESP8266 module.
The Kahuna comes with a cable to connect directly to the Pixhawk-standard `TELEM1` or `TELEM2` ports.
- It is pre-flashed with the latest firmware, and has a u.fl connector for an external antenna.
+ It is pre-flashed with the latest firmware, and has a `u.fl` connector for an external antenna.
At most you may need to set the baud rate parameter, which for `TELEM1` is `SER_TEL1_BAUD = 57600 (57600 8N1)`.
The [User Guide](https://docs.google.com/document/d/1VyOsp9_q6dIAdYdWuDFcWoqqrNy_vbFMANubZA3Uz5g/edit?pli=1&tab=t.0) include WiFi setup and other relevant information.
@@ -115,13 +115,9 @@ If you have any problem connecting, see [QGC Usage Problems](https://docs.qgroun
ESP8266 modules from different manufacturers may not have appropriate ESP8266 firmware pre-installed.
The instructions below explain how to update radios with the correct version.
-### Pre Built Binaries
-
-[MavLink ESP8266 Firmware V 1.2.2](http://www.grubba.com/mavesp8266/firmware-1.2.2.bin)
-
### Build From Sources
-The [firmware repository](https://github.com/dogmaphobic/mavesp8266) contains instructions and all the tools needed for building and flashing the ESP8266 firmware.
+The [firmware repository](https://github.com/BeyondRobotix/mavesp8266) contains instructions and all the tools needed for building and flashing the ESP8266 firmware.
### Updating the Firmware OTA
@@ -136,7 +132,7 @@ This is the easiest way to update firmware!
### Flashing the ESP8266 Firmware
Before flashing, make sure you boot the ESP8266 in _Flash Mode_ as described below.
-If you cloned the [MavESP8266](https://github.com/dogmaphobic/mavesp8266) repository, you can build and flash the firmware using the provided [PlatformIO](http://platformio.org) tools and environment.
+If you cloned the [MavESP8266](https://github.com/BeyondRobotix/mavesp8266) repository, you can build and flash the firmware using the provided [PlatformIO](https://platformio.org/) tools and environment.
If you downloaded the pre-built firmware above, download the [esptool](https://github.com/espressif/esptool) utility and use the command line below:
```sh
diff --git a/docs/zh/telemetry/holybro_microhard_p900_radio.md b/docs/zh/telemetry/holybro_microhard_p900_radio.md
index 19f4abec35a..1763465d0d7 100644
--- a/docs/zh/telemetry/holybro_microhard_p900_radio.md
+++ b/docs/zh/telemetry/holybro_microhard_p900_radio.md
@@ -1,6 +1,6 @@
# Holybro Microhard P900 Radio
-The [Holybro Microhard P900 Radio](https://holybro.com/products/microhard-radio) integrates the [Microhard Pico Serial](http://microhardcorp.com/P900.php) P900 RF module, which is capable of delivering high-performance wireless serial communications in robust and secure mesh, point-to-point or point-to-multipoint topologies.
+The [Holybro Microhard P900 Radio](https://holybro.com/products/microhard-radio) integrates the [Microhard Pico Serial](https://microhardcorp.com/P900.php) P900 RF module, which is capable of delivering high-performance wireless serial communications in robust and secure mesh, point-to-point or point-to-multipoint topologies.
It enables MAVLink communication between a radio on a vehicle and a GCS.
This radio operate within the 902-928 MHz ISM frequency band, using frequency hopping spread spectrum (FHSS) technology, providing reliable wireless asynchronous data transfer between most equipment types which employ a serial interface.
diff --git a/docs/zh/telemetry/microhard_serial.md b/docs/zh/telemetry/microhard_serial.md
index 0fe3163a7c4..1bd646430b8 100644
--- a/docs/zh/telemetry/microhard_serial.md
+++ b/docs/zh/telemetry/microhard_serial.md
@@ -1,6 +1,6 @@
# Microhard Serial Telemetry Radios
-[Microhard Pico Serial Radios](http://microhardcorp.com/P900.php) integrate the [Microhard Pico Serial](http://microhardcorp.com/P900.php) P900 RF module.
+[Microhard Pico Serial Radios](https://microhardcorp.com/P900.php) integrate the _Microhard Pico Serial_ P900 RF module.
This is a relatively small size and low cost radio that supports modes including point to point, point to multi-point, and mesh modes.
It has configurable power output and can also be configured to use forward error correction.
@@ -59,7 +59,7 @@ The screen shots below show the default radio configuration settings for connect

 -The [Pico Series P900.Operating Manual.v1.8.7](https://github.com/PX4/PX4-user_guide/raw/main/assets/hardware/telemetry/Pico-Series-P900.Operating-Manual.v1.8.7.pdf) has additional information on radio configuration (including mesh and multipoint modes).
+The [Pico Series P900.Operating Manual.v1.8.7](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/hardware/telemetry/Pico-Series-P900.Operating-Manual.v1.8.7.pdf) has additional information on radio configuration (including mesh and multipoint modes).
### Mesh and Multipoint Modes
diff --git a/docs/zh/telemetry/rfd900_telemetry.md b/docs/zh/telemetry/rfd900_telemetry.md
index 46cda6de7fd..dccf9f21989 100644
--- a/docs/zh/telemetry/rfd900_telemetry.md
+++ b/docs/zh/telemetry/rfd900_telemetry.md
@@ -1,6 +1,6 @@
# RFD900长距离数传
-[jDrones](http://store.jDrones.com) and [RFDesign](http://rfdesign.com.au/) offer _long-range_ [SiK](../telemetry/sik_radio.md)-compatible telemetry radios.
+[jDrones](http://store.jDrones.com) and [RFDesign](https://rfdesign.com.au/) offer _long-range_ [SiK](../telemetry/sik_radio.md)-compatible telemetry radios.
这个电台配合普通天线可以提供最少5公里的稳定链接。

@@ -10,7 +10,8 @@ _jDrones_ have productized _RFDesign_ modems (added a casing with power manageme
The first such modem was the _RFD900_, but both _RFDesign_ and _jDrones_ have since iterated to new versions.
:::
-The _jDrones_ radios have a JST-GH connector, and come with cables for: _JST-GH to JST-GH_ and _JST-GH to DF-13_. They can therefore be used in a "plug-n-play" way with most [Pixhawk Series](../flight_controller/pixhawk_series.md) controllers (you might have to change/use an appropriate connector for some "non-standard" boards).
+The _jDrones_ radios have a JST-GH connector, and come with cables for: _JST-GH to JST-GH_ and _JST-GH to DF-13_.
+They can therefore be used in a "plug-n-play" way with most [Pixhawk Series](../flight_controller/pixhawk_series.md) controllers (you might have to change/use an appropriate connector for some "non-standard" boards).
There are a number of versions available:
diff --git a/docs/zh/test_and_ci/docker.md b/docs/zh/test_and_ci/docker.md
index b0df9b6ef0f..7a05c491bf6 100644
--- a/docs/zh/test_and_ci/docker.md
+++ b/docs/zh/test_and_ci/docker.md
@@ -35,15 +35,13 @@ sudo usermod -aG docker $USER
# Log in/out again before using docker!
```
-
+## Container Hierarchy {#px4_containers}
-## 本地编辑层次结构
-
-The available containers are on [Github here](https://github.com/PX4/PX4-containers/tree/master?tab=readme-ov-file#container-hierarchy).
+The available containers are on [GitHub here](https://github.com/PX4/PX4-containers/tree/master?tab=readme-ov-file#container-hierarchy).
使用容器的最简单方法是通过 docker_run.sh 帮助程序脚本。
The containers are hierarchical, such that containers have the functionality of their parents.
-For example, the partial hierarchy below shows that the docker container with nuttx build tools (`px4-dev-nuttx-focal`) does not include ROS 2, while the simulation containers do:
+For example, the partial hierarchy below shows that the docker container with NuttX build tools (`px4-dev-nuttx-focal`) does not include ROS 2, while the simulation containers do:
```plain
- px4io/px4-dev-base-focal
@@ -58,7 +56,7 @@ For example, the partial hierarchy below shows that the docker container with nu
The most recent version can be accessed using the `latest` tag: `px4io/px4-dev-nuttx-focal:latest`
(available tags are listed for each container on _hub.docker.com_.
-For example, the `px4io/px4-dev-nuttx-focal` tags can be found [here](https://hub.docker.com/r/px4io/px4-dev-nuttx-focal/tags?page=1&ordering=last_updated)).
+For example, the `px4io/px4-dev-nuttx-focal` tags can be found on [hub.docker.com here](https://hub.docker.com/r/px4io/px4-dev-nuttx-focal/tags?page=1&ordering=last_updated)).
:::tip
Typically you should use a recent container, but not necessarily the `latest` (as this changes too often).
@@ -97,9 +95,7 @@ sudo ./Tools/docker_run.sh 'bash'
The script is easy because you don't need to know anything much about _Docker_ or think about what container to use. 要重新进入此容器(将保留您的更改),只需执行以下操作: The manual approach discussed in the [section below](#manual_start) is more flexible and should be used if you have any problems with the script.
:::
-
-
-### 手动调用 Docker
+### Calling Docker Manually {#manual_start}
The syntax of a typical command is shown below.
This runs a Docker container that has support for X forwarding (makes the simulation GUI available from inside the container).
@@ -163,7 +159,8 @@ make px4_sitl_default gazebo-classic
### 重新进入容器
-The `docker run` command can only be used to create a new container. To get back into this container (which will retain your changes) simply do:
+The `docker run` command can only be used to create a new container.
+To get back into this container (which will retain your changes) simply do:
```sh
# start the container
@@ -192,9 +189,14 @@ docker rm 45eeb98f1dd9
### QGroundControl
-When running a simulation instance e.g. SITL inside the docker container and controlling it via _QGroundControl_ from the host, the communication link has to be set up manually. The autoconnect feature of _QGroundControl_ does not work here.
+When running a simulation instance e.g. SITL inside the docker container and controlling it via _QGroundControl_ from the host, the communication link has to be set up manually.
+The autoconnect feature of _QGroundControl_ does not work here.
-In _QGroundControl_, navigate to [Settings](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/settings_view/settings_view.html) and select Comm Links. Create a new link that uses the UDP protocol. The port depends on the used [configuration](https://github.com/PX4/PX4-Autopilot/blob/main/ROMFS/px4fmu_common/init.d-posix/rcS) e.g. port 14570 for the SITL config. The IP address is the one of your docker container, usually 172.17.0.1/16 when using the default network. The IP address of the docker container can be found with the following command (assuming the container name is `mycontainer`):
+In _QGroundControl_, navigate to [Settings](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/settings_view/settings_view.html) and select Comm Links.
+Create a new link that uses the UDP protocol.
+The port depends on the used [configuration](https://github.com/PX4/PX4-Autopilot/blob/main/ROMFS/px4fmu_common/init.d-posix/rcS) e.g. port 14570 for the SITL config.
+The IP address is the one of your docker container, usually 172.17.0.1/16 when using the default network.
+The IP address of the docker container can be found with the following command (assuming the container name is `mycontainer`):
```sh
$ docker inspect -f '{ {range .NetworkSettings.Networks}}{ {.IPAddress}}{ {end}}' mycontainer
@@ -208,9 +210,11 @@ Spaces between double curly braces above should be not be present (they are need
#### 权限错误
-The container creates files as needed with a default user - typically "root". This can lead to permission errors where the user on the host computer is not able to access files created by the container.
+The container creates files as needed with a default user - typically "root".
+This can lead to permission errors where the user on the host computer is not able to access files created by the container.
-The example above uses the line `--env=LOCAL_USER_ID="$(id -u)"` to create a user in the container with the same UID as the user on the host. This ensures that all files created within the container will be accessible on the host.
+The example above uses the line `--env=LOCAL_USER_ID="$(id -u)"` to create a user in the container with the same UID as the user on the host.
+This ensures that all files created within the container will be accessible on the host.
#### 图形驱动问题
@@ -220,17 +224,15 @@ It's possible that running Gazebo Classic will result in a similar error message
libGL error: failed to load driver: swrast
```
-In that case the native graphics driver for your host system must be installed. Download the right driver and install it inside the container. For Nvidia drivers the following command should be used (otherwise the installer will see the loaded modules from the host and refuse to proceed):
+In that case the native graphics driver for your host system must be installed.
+Download the right driver and install it inside the container.
+For Nvidia drivers the following command should be used (otherwise the installer will see the loaded modules from the host and refuse to proceed):
```sh
./NVIDIA-DRIVER.run -a -N --ui=none --no-kernel-module
```
-More information on this can be found [here](http://gernotklingler.com/blog/howto-get-hardware-accelerated-opengl-support-docker/).
-
-
-
-## 虚拟机支持
+## Virtual Machine Support {#virtual_machine}
尝试禁用并行构建。
diff --git a/docs/zh/test_and_ci/integration_testing_mavsdk.md b/docs/zh/test_and_ci/integration_testing_mavsdk.md
index b8758c02674..f42654f229a 100644
--- a/docs/zh/test_and_ci/integration_testing_mavsdk.md
+++ b/docs/zh/test_and_ci/integration_testing_mavsdk.md
@@ -162,4 +162,4 @@ About to run 39 test cases for 3 selected models (1 iteration):
Terms used:
- "model": This is the selected Gazebo model, e.g. `iris`.
-- "test case": This is a [catch2 test case](https://github.com/catchorg/Catch2/blob/master/docs/test-cases-and-sections.md).
+- "test case": This is a [catch2 test case](https://github.com/catchorg/Catch2/blob/devel/docs/test-cases-and-sections.md).
diff --git a/docs/zh/test_and_ci/integration_testing_ros1_mavros.md b/docs/zh/test_and_ci/integration_testing_ros1_mavros.md
index 4f99e49f6f4..e2a21e67959 100644
--- a/docs/zh/test_and_ci/integration_testing_ros1_mavros.md
+++ b/docs/zh/test_and_ci/integration_testing_ros1_mavros.md
@@ -59,7 +59,7 @@ The **.test** files launch the corresponding Python tests defined in `integratio
This section explains how to write a new python test using ROS 1/MAVROS, test it, and add it to the PX4 test suite.
We recommend you review the existing tests as examples/inspiration ([integrationtests/python_src/px4_it/mavros/](https://github.com/PX4/PX4-Autopilot/tree/main/integrationtests/python_src/px4_it/mavros)).
-The official ROS documentation also contains information on how to use [unittest](http://wiki.ros.org/unittest) (on which this test suite is based).
+The official ROS documentation also contains information on how to use [unittest](https://wiki.ros.org/unittest) (on which this test suite is based).
To write a new test:
@@ -117,25 +117,23 @@ To write a new test:
```
2. Run the new test only
-
- Start the simulator:
- ```sh
- cd
- source Tools/simulation/gazebo/setup_gazebo.bash
- roslaunch launch/mavros_posix_sitl.launch
- ```
+ ```sh
+ cd
+ source Tools/simulation/gazebo/setup_gazebo.bash
+ roslaunch launch/mavros_posix_sitl.launch
+ ```
- Run test (in a new shell):
- ```sh
- cd
- source Tools/simulation/gazebo/setup_gazebo.bash
- rosrun px4 mavros_new_test.py
- ```
+ ```sh
+ cd
+ source Tools/simulation/gazebo/setup_gazebo.bash
+ rosrun px4 mavros_new_test.py
+ ```
3. Add new test node to a launch file
-
- In `test/` create a new `.test` ROS launch file.
- Call the test file using one of the base scripts _rostest_px4_run.sh_ or _rostest_avoidance_run.sh_
diff --git a/docs/zh/tutorials/motion-capture.md b/docs/zh/tutorials/motion-capture.md
index 42eefb0c1ed..523e5cb86c3 100644
--- a/docs/zh/tutorials/motion-capture.md
+++ b/docs/zh/tutorials/motion-capture.md
@@ -44,7 +44,7 @@ See [Switching State Estimators](../advanced/switching_state_estimators.md) for
### EKF2
The ROS topic for motion cap `mocap_pose_estimate` for mocap systems and `vision_pose_estimate` for vision.
-Check [mavros_extras](http://wiki.ros.org/mavros_extras) for further info.
+Check [mavros_extras](https://wiki.ros.org/mavros_extras) for further info.
## 测试
-The [Pico Series P900.Operating Manual.v1.8.7](https://github.com/PX4/PX4-user_guide/raw/main/assets/hardware/telemetry/Pico-Series-P900.Operating-Manual.v1.8.7.pdf) has additional information on radio configuration (including mesh and multipoint modes).
+The [Pico Series P900.Operating Manual.v1.8.7](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/hardware/telemetry/Pico-Series-P900.Operating-Manual.v1.8.7.pdf) has additional information on radio configuration (including mesh and multipoint modes).
### Mesh and Multipoint Modes
diff --git a/docs/zh/telemetry/rfd900_telemetry.md b/docs/zh/telemetry/rfd900_telemetry.md
index 46cda6de7fd..dccf9f21989 100644
--- a/docs/zh/telemetry/rfd900_telemetry.md
+++ b/docs/zh/telemetry/rfd900_telemetry.md
@@ -1,6 +1,6 @@
# RFD900长距离数传
-[jDrones](http://store.jDrones.com) and [RFDesign](http://rfdesign.com.au/) offer _long-range_ [SiK](../telemetry/sik_radio.md)-compatible telemetry radios.
+[jDrones](http://store.jDrones.com) and [RFDesign](https://rfdesign.com.au/) offer _long-range_ [SiK](../telemetry/sik_radio.md)-compatible telemetry radios.
这个电台配合普通天线可以提供最少5公里的稳定链接。

@@ -10,7 +10,8 @@ _jDrones_ have productized _RFDesign_ modems (added a casing with power manageme
The first such modem was the _RFD900_, but both _RFDesign_ and _jDrones_ have since iterated to new versions.
:::
-The _jDrones_ radios have a JST-GH connector, and come with cables for: _JST-GH to JST-GH_ and _JST-GH to DF-13_. They can therefore be used in a "plug-n-play" way with most [Pixhawk Series](../flight_controller/pixhawk_series.md) controllers (you might have to change/use an appropriate connector for some "non-standard" boards).
+The _jDrones_ radios have a JST-GH connector, and come with cables for: _JST-GH to JST-GH_ and _JST-GH to DF-13_.
+They can therefore be used in a "plug-n-play" way with most [Pixhawk Series](../flight_controller/pixhawk_series.md) controllers (you might have to change/use an appropriate connector for some "non-standard" boards).
There are a number of versions available:
diff --git a/docs/zh/test_and_ci/docker.md b/docs/zh/test_and_ci/docker.md
index b0df9b6ef0f..7a05c491bf6 100644
--- a/docs/zh/test_and_ci/docker.md
+++ b/docs/zh/test_and_ci/docker.md
@@ -35,15 +35,13 @@ sudo usermod -aG docker $USER
# Log in/out again before using docker!
```
-
+## Container Hierarchy {#px4_containers}
-## 本地编辑层次结构
-
-The available containers are on [Github here](https://github.com/PX4/PX4-containers/tree/master?tab=readme-ov-file#container-hierarchy).
+The available containers are on [GitHub here](https://github.com/PX4/PX4-containers/tree/master?tab=readme-ov-file#container-hierarchy).
使用容器的最简单方法是通过 docker_run.sh 帮助程序脚本。
The containers are hierarchical, such that containers have the functionality of their parents.
-For example, the partial hierarchy below shows that the docker container with nuttx build tools (`px4-dev-nuttx-focal`) does not include ROS 2, while the simulation containers do:
+For example, the partial hierarchy below shows that the docker container with NuttX build tools (`px4-dev-nuttx-focal`) does not include ROS 2, while the simulation containers do:
```plain
- px4io/px4-dev-base-focal
@@ -58,7 +56,7 @@ For example, the partial hierarchy below shows that the docker container with nu
The most recent version can be accessed using the `latest` tag: `px4io/px4-dev-nuttx-focal:latest`
(available tags are listed for each container on _hub.docker.com_.
-For example, the `px4io/px4-dev-nuttx-focal` tags can be found [here](https://hub.docker.com/r/px4io/px4-dev-nuttx-focal/tags?page=1&ordering=last_updated)).
+For example, the `px4io/px4-dev-nuttx-focal` tags can be found on [hub.docker.com here](https://hub.docker.com/r/px4io/px4-dev-nuttx-focal/tags?page=1&ordering=last_updated)).
:::tip
Typically you should use a recent container, but not necessarily the `latest` (as this changes too often).
@@ -97,9 +95,7 @@ sudo ./Tools/docker_run.sh 'bash'
The script is easy because you don't need to know anything much about _Docker_ or think about what container to use. 要重新进入此容器(将保留您的更改),只需执行以下操作: The manual approach discussed in the [section below](#manual_start) is more flexible and should be used if you have any problems with the script.
:::
-
-
-### 手动调用 Docker
+### Calling Docker Manually {#manual_start}
The syntax of a typical command is shown below.
This runs a Docker container that has support for X forwarding (makes the simulation GUI available from inside the container).
@@ -163,7 +159,8 @@ make px4_sitl_default gazebo-classic
### 重新进入容器
-The `docker run` command can only be used to create a new container. To get back into this container (which will retain your changes) simply do:
+The `docker run` command can only be used to create a new container.
+To get back into this container (which will retain your changes) simply do:
```sh
# start the container
@@ -192,9 +189,14 @@ docker rm 45eeb98f1dd9
### QGroundControl
-When running a simulation instance e.g. SITL inside the docker container and controlling it via _QGroundControl_ from the host, the communication link has to be set up manually. The autoconnect feature of _QGroundControl_ does not work here.
+When running a simulation instance e.g. SITL inside the docker container and controlling it via _QGroundControl_ from the host, the communication link has to be set up manually.
+The autoconnect feature of _QGroundControl_ does not work here.
-In _QGroundControl_, navigate to [Settings](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/settings_view/settings_view.html) and select Comm Links. Create a new link that uses the UDP protocol. The port depends on the used [configuration](https://github.com/PX4/PX4-Autopilot/blob/main/ROMFS/px4fmu_common/init.d-posix/rcS) e.g. port 14570 for the SITL config. The IP address is the one of your docker container, usually 172.17.0.1/16 when using the default network. The IP address of the docker container can be found with the following command (assuming the container name is `mycontainer`):
+In _QGroundControl_, navigate to [Settings](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/settings_view/settings_view.html) and select Comm Links.
+Create a new link that uses the UDP protocol.
+The port depends on the used [configuration](https://github.com/PX4/PX4-Autopilot/blob/main/ROMFS/px4fmu_common/init.d-posix/rcS) e.g. port 14570 for the SITL config.
+The IP address is the one of your docker container, usually 172.17.0.1/16 when using the default network.
+The IP address of the docker container can be found with the following command (assuming the container name is `mycontainer`):
```sh
$ docker inspect -f '{ {range .NetworkSettings.Networks}}{ {.IPAddress}}{ {end}}' mycontainer
@@ -208,9 +210,11 @@ Spaces between double curly braces above should be not be present (they are need
#### 权限错误
-The container creates files as needed with a default user - typically "root". This can lead to permission errors where the user on the host computer is not able to access files created by the container.
+The container creates files as needed with a default user - typically "root".
+This can lead to permission errors where the user on the host computer is not able to access files created by the container.
-The example above uses the line `--env=LOCAL_USER_ID="$(id -u)"` to create a user in the container with the same UID as the user on the host. This ensures that all files created within the container will be accessible on the host.
+The example above uses the line `--env=LOCAL_USER_ID="$(id -u)"` to create a user in the container with the same UID as the user on the host.
+This ensures that all files created within the container will be accessible on the host.
#### 图形驱动问题
@@ -220,17 +224,15 @@ It's possible that running Gazebo Classic will result in a similar error message
libGL error: failed to load driver: swrast
```
-In that case the native graphics driver for your host system must be installed. Download the right driver and install it inside the container. For Nvidia drivers the following command should be used (otherwise the installer will see the loaded modules from the host and refuse to proceed):
+In that case the native graphics driver for your host system must be installed.
+Download the right driver and install it inside the container.
+For Nvidia drivers the following command should be used (otherwise the installer will see the loaded modules from the host and refuse to proceed):
```sh
./NVIDIA-DRIVER.run -a -N --ui=none --no-kernel-module
```
-More information on this can be found [here](http://gernotklingler.com/blog/howto-get-hardware-accelerated-opengl-support-docker/).
-
-
-
-## 虚拟机支持
+## Virtual Machine Support {#virtual_machine}
尝试禁用并行构建。
diff --git a/docs/zh/test_and_ci/integration_testing_mavsdk.md b/docs/zh/test_and_ci/integration_testing_mavsdk.md
index b8758c02674..f42654f229a 100644
--- a/docs/zh/test_and_ci/integration_testing_mavsdk.md
+++ b/docs/zh/test_and_ci/integration_testing_mavsdk.md
@@ -162,4 +162,4 @@ About to run 39 test cases for 3 selected models (1 iteration):
Terms used:
- "model": This is the selected Gazebo model, e.g. `iris`.
-- "test case": This is a [catch2 test case](https://github.com/catchorg/Catch2/blob/master/docs/test-cases-and-sections.md).
+- "test case": This is a [catch2 test case](https://github.com/catchorg/Catch2/blob/devel/docs/test-cases-and-sections.md).
diff --git a/docs/zh/test_and_ci/integration_testing_ros1_mavros.md b/docs/zh/test_and_ci/integration_testing_ros1_mavros.md
index 4f99e49f6f4..e2a21e67959 100644
--- a/docs/zh/test_and_ci/integration_testing_ros1_mavros.md
+++ b/docs/zh/test_and_ci/integration_testing_ros1_mavros.md
@@ -59,7 +59,7 @@ The **.test** files launch the corresponding Python tests defined in `integratio
This section explains how to write a new python test using ROS 1/MAVROS, test it, and add it to the PX4 test suite.
We recommend you review the existing tests as examples/inspiration ([integrationtests/python_src/px4_it/mavros/](https://github.com/PX4/PX4-Autopilot/tree/main/integrationtests/python_src/px4_it/mavros)).
-The official ROS documentation also contains information on how to use [unittest](http://wiki.ros.org/unittest) (on which this test suite is based).
+The official ROS documentation also contains information on how to use [unittest](https://wiki.ros.org/unittest) (on which this test suite is based).
To write a new test:
@@ -117,25 +117,23 @@ To write a new test:
```
2. Run the new test only
-
- Start the simulator:
- ```sh
- cd
- source Tools/simulation/gazebo/setup_gazebo.bash
- roslaunch launch/mavros_posix_sitl.launch
- ```
+ ```sh
+ cd
+ source Tools/simulation/gazebo/setup_gazebo.bash
+ roslaunch launch/mavros_posix_sitl.launch
+ ```
- Run test (in a new shell):
- ```sh
- cd
- source Tools/simulation/gazebo/setup_gazebo.bash
- rosrun px4 mavros_new_test.py
- ```
+ ```sh
+ cd
+ source Tools/simulation/gazebo/setup_gazebo.bash
+ rosrun px4 mavros_new_test.py
+ ```
3. Add new test node to a launch file
-
- In `test/` create a new `.test` ROS launch file.
- Call the test file using one of the base scripts _rostest_px4_run.sh_ or _rostest_avoidance_run.sh_
diff --git a/docs/zh/tutorials/motion-capture.md b/docs/zh/tutorials/motion-capture.md
index 42eefb0c1ed..523e5cb86c3 100644
--- a/docs/zh/tutorials/motion-capture.md
+++ b/docs/zh/tutorials/motion-capture.md
@@ -44,7 +44,7 @@ See [Switching State Estimators](../advanced/switching_state_estimators.md) for
### EKF2
The ROS topic for motion cap `mocap_pose_estimate` for mocap systems and `vision_pose_estimate` for vision.
-Check [mavros_extras](http://wiki.ros.org/mavros_extras) for further info.
+Check [mavros_extras](https://wiki.ros.org/mavros_extras) for further info.
## 测试