# For example: omnibusf4sd_bl or kakutef7_bl
```
diff --git a/docs/ko/advanced_config/ethernet_setup.md b/docs/ko/advanced_config/ethernet_setup.md
index d173f136d4..79f58d86da 100644
--- a/docs/ko/advanced_config/ethernet_setup.md
+++ b/docs/ko/advanced_config/ethernet_setup.md
@@ -108,7 +108,7 @@ You also need to [configure the Ethernet port](#px4-mavlink-serial-port-configur
If you're using Ubuntu for your ground station (or companion computer) then you can use [netplan](https://netplan.io/) to configure the network.
Below we show how you write a setup to the netplan configuration file "`/etc/netplan/01-network-manager-all.yaml`", which would run on the same network as used by the PX4 setup above.
-Note that there are many more [examples](https://netplan.io/examples/) and instructions in the [netplan](https://netplan.io/) documentation.
+Note that there are many more [examples](https://github.com/canonical/netplan/tree/main/examples) and instructions in the [netplan](https://netplan.io/) documentation.
To setup the Ubuntu Computer:
diff --git a/docs/ko/advanced_config/prearm_arm_disarm.md b/docs/ko/advanced_config/prearm_arm_disarm.md
index 0ea9e5056d..be52c15811 100644
--- a/docs/ko/advanced_config/prearm_arm_disarm.md
+++ b/docs/ko/advanced_config/prearm_arm_disarm.md
@@ -109,7 +109,7 @@ Arming is prevented if:
- The current mode requires an adequate global position estimate but the vehicle does not have GPS lock.
- Many more (see [arming/disarming safety settings](../config/safety.md#arming-disarming-settings) for more information).
-The current failed checks can be viewed in QGroundControl (v4.2.0 and later) [Arming Check Report](../flying/pre_flight_checks.md#qgc-arming-check-report) (see also [Fly View > Arming and Preflight Checks](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/fly_view/fly_view.md#arm)).
+The current failed checks can be viewed in QGroundControl (v4.2.0 and later) [Arming Check Report](../flying/pre_flight_checks.md#qgc-arming-check-report) (see also [Fly View > Toolbar > Flight Status](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/fly_view/fly_view_toolbar.html#flight-status)).
Note that internally PX4 runs arming checks at 10Hz.
A list of the failed checks is kept, and if the list changes PX4 emits the current list using the [Events interface](../concept/events_interface.md).
@@ -159,7 +159,6 @@ It corresponds to: [COM_PREARM_MODE=1](#COM_PREARM_MODE) (safety switch) and [CB
- 시스템이 시동전 상태로 전환: 추진 모터를 제외한 모든 액츄에이터 동작 가능(예: 보조익)
- 시스템 안전 장치 꺼짐: 시동 가능
3. 시동 명령 인가
-
- 시스템에 시동이 걸림
- 모든 모터와 액츄에이터를 움직일 수 있음
@@ -177,7 +176,6 @@ This corresponds to [COM_PREARM_MODE=0](#COM_PREARM_MODE) (Disabled) and [CBRK_I
- _All actuators stay locked into disarmed position (same as disarmed)._
- 시스템 안전 장치 꺼짐: 시동 가능
3. 시동 명령 인가
-
- 시스템에 시동이 걸림
- 모든 모터와 액츄에이터를 움직일 수 있음
diff --git a/docs/ko/advanced_config/tuning_the_ecl_ekf.md b/docs/ko/advanced_config/tuning_the_ecl_ekf.md
index 37e35aa305..1568a23e05 100644
--- a/docs/ko/advanced_config/tuning_the_ecl_ekf.md
+++ b/docs/ko/advanced_config/tuning_the_ecl_ekf.md
@@ -277,7 +277,7 @@ For more details about the configuration of height sources, [click here](#height
#### 방향(Yaw) 측정
-Some GPS receivers such as the [Trimble MB-Two RTK GPS receiver](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) can be used to provide a heading measurement that replaces the use of magnetometer data.
+Some GPS receivers such as the [Trimble MB-Two RTK GPS receiver](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) can be used to provide a heading measurement that replaces the use of magnetometer data.
This can be a significant advantage when operating in an environment where large magnetic anomalies are present, or at latitudes here the earth's magnetic field has a high inclination.
Use of GPS yaw measurements is enabled by setting bit position 3 to 1 (adding 8) in the [EKF2_GPS_CTRL](../advanced_config/parameter_reference.md#EKF2_GPS_CTRL) parameter.
@@ -542,9 +542,9 @@ When this has been done, the performance metadata files can be processed to prov
### 출력 데이터
-- Attitude output data is found in the [VehicleAttitude](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleAttitude.msg) message.
-- Local position output data is found in the [VehicleLocalPosition](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleLocalPosition.msg) message.
-- Global \(WGS-84\) output data is found in the [VehicleGlobalPosition](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleGlobalPosition.msg) message.
+- Attitude output data is found in the [VehicleAttitude](https://github.com/PX4/PX4-Autopilot/blob/main/msg/versioned/VehicleAttitude.msg) message.
+- Local position output data is found in the [VehicleLocalPosition](https://github.com/PX4/PX4-Autopilot/blob/main/msg/versioned/VehicleLocalPosition.msg) message.
+- Global \(WGS-84\) output data is found in the [VehicleGlobalPosition](https://github.com/PX4/PX4-Autopilot/blob/main/msg/versioned/VehicleGlobalPosition.msg) message.
- Wind velocity output data is found in the [Wind.msg](https://github.com/PX4/PX4-Autopilot/blob/main/msg/Wind.msg) message.
### 상태
diff --git a/docs/ko/advanced_features/precland.md b/docs/ko/advanced_features/precland.md
index 019be32e8f..f8d3e7e7c1 100644
--- a/docs/ko/advanced_features/precland.md
+++ b/docs/ko/advanced_features/precland.md
@@ -103,10 +103,10 @@ At time of writing is no _convenient_ way to directly invoke precision landing (
### IR 센서/비콘 설정
-The IR sensor/landing beacon solution requires an [IR-LOCK Sensor](https://irlock.com/products/ir-lock-sensor-precision-landing-kit) and downward facing [distance sensor](../sensor/rangefinders.md) connected to the flight controller, and an IR beacon as a target (e.g. [IR-LOCK MarkOne](https://irlock.com/collections/markone)).
+The IR sensor/landing beacon solution requires an [IR-LOCK Sensor](https://irlock.com/products/ir-lock-sensor-precision-landing-kit) and downward facing [distance sensor](../sensor/rangefinders.md) connected to the flight controller, and an IR beacon as a target (e.g. [IR-LOCK MarkOne](https://irlock.com/collections/ir-markers)).
정밀 착륙은 약 10 cm 이내의 오차로 착륙할 수 있게 합니다. GPS 착륙은 수 미터의 오차가 발생할 수 있습니다.
-Install the IR-LOCK sensor by following the [official guide](https://irlock.readme.io/v2.0/docs).
+Install the IR-LOCK sensor by following the [official guide](https://irlock.readme.io/docs/getting-started).
센서의 x축이 기체의 y축과 정렬되어 있는지, 센서의 y축이 기체의 -x 방향과 정렬되어 있는지 확인하십시오 (카메라에서 전방으로 90도 기울인 경우).
Install a [range/distance sensor](../sensor/rangefinders.md) (the _LidarLite v3_ has been found to work well).
diff --git a/docs/ko/advanced_features/satcom_roadblock.md b/docs/ko/advanced_features/satcom_roadblock.md
index 106ace9783..d28351c8c9 100644
--- a/docs/ko/advanced_features/satcom_roadblock.md
+++ b/docs/ko/advanced_features/satcom_roadblock.md
@@ -9,7 +9,7 @@
위성 통신에는 다음의 요소들이 필요합니다.
-- A [RockBlock 9603 Iridium Satellite Modem](https://www.iridium.com/products/rock-seven-rockblock-9603/) module connected to a Pixhawk flashed with the PX4 Autopilot.
+- A [RockBlock 9603 Iridium Satellite Modem](https://www.iridium.com/products/ground-control-rockblock-9603/) module connected to a Pixhawk flashed with the PX4 Autopilot.
- Ubuntu Linux를 실행하는 메시지 릴레이 서버
- A ground station computer running _QGroundControl_ on Ubuntu Linux
@@ -21,7 +21,7 @@
The setup was tested with the current release of _QGroundControl_ running on Ubuntu 14.04 and 16.04.
- 다른 지상국 및 운영체제를 사용할 수 있지만, 아직 테스트되지 않았습니다.
-- The [RockBlock MK2](https://www.groundcontrol.com/us/product/rockblock-9602-satellite-modem/) module can also be used.
+- The [RockBlock MK2](https://www.groundcontrol.com/product/rockblock-9602-satellite-modem/) module can also be used.
RockBlock 9603 모듈은 크기가 작고 가볍우면서도 동일한 기능을 제공하기 때문에 권장됩니다.
:::
@@ -34,7 +34,7 @@ The setup was tested with the current release of _QGroundControl_ running on Ubu
- Each message transmitted over the system costs one _credit_ per 50 bytes.
번들 크기에 따라 RockBlock에서 신용당 0.04파운드 0.11파운드에 신용대출을 구입할 수 있습니다.
-Refer to the [RockBlock Documentation](https://docs.rockblock.rock7.com/docs) for a detailed explanation of the modules, running costs and _RockBlock_ in general.
+Refer to the [RockBlock Documentation](https://docs.groundcontrol.com/iot/rockblock) for a detailed explanation of the modules, running costs and _RockBlock_ in general.
## 기체 설정
@@ -43,15 +43,15 @@ Refer to the [RockBlock Documentation](https://docs.rockblock.rock7.com/docs) fo
RockBlock 모듈을 Pixhawk의 직렬 포트에 연결합니다.
모듈의 전원 요구 사항으로 인하여 5V에서 최대 0.5A가 필요하므로 고출력 직렬 포트를 통해서만 전원을 공급할 수 있습니다.
사용 가능한 별도의 전원을 사용시에는 Pixhawk와 동일한 접지이어야 합니다.
-The details of the [connectors](https://docs.rockblock.rock7.com/docs/connectors) and the [power requirements](https://docs.rockblock.rock7.com/docs/power-supply) can be found in the RockBlock documentation.
+The details of the [connectors](https://docs.groundcontrol.com/iot/rockblock/specification/connectors-wiring) and the [power requirements](https://docs.groundcontrol.com/iot/rockblock/electrical) can be found in the RockBlock documentation.
### 모듈
모듈은 내부 안테나 또는 SMA 커넥터에 연결된 외부 안테나를 사용할 수 있습니다.
-To [switch between the two antennas modes](https://docs.rockblock.rock7.com/docs/switching-rockblock-9603-antenna-mode) the position of a small RF link cable needs to changed.
+To [switch between the two antennas modes](https://docs.groundcontrol.com/iot/rockblock/user-manual/9603-atenna-mode) the position of a small RF link cable needs to changed.
외부 안테나를 사용하는 경우 모듈 손상을 방지하기 위해 안테나의 전원을 켜기 전에 항상 안테나가 모듈에 연결되어 있는 지 확인하십시오.
-모듈의 기본 보드 속도는 19200입니다. However, the PX4 _iridiumsbd_ driver requires a baud rate of 115200 so it needs to be changed using the [AT commands](https://www.groundcontrol.com/en/wp-content/uploads/2022/02/IRDM_ISU_ATCommandReferenceMAN0009_Rev2.0_ATCOMM_Oct2012.pdf).
+모듈의 기본 보드 속도는 19200입니다. However, the PX4 _iridiumsbd_ driver requires a baud rate of 115200 so it needs to be changed using the [AT commands](https://www.groundcontrol.com/wp-content/uploads/2022/02/IRDM_ISU_ATCommandReferenceMAN0009_Rev2.0_ATCOMM_Oct2012.pdf).
1. Connect to the module with using a 19200/8-N-1 setting and check if the communication is working using the command: `AT`.
The response should be: `OK`.
@@ -101,7 +101,6 @@ Log in to the [account](https://rockblock.rock7.com/Operations) and register the
릴레이 서버는 Ubuntu 16.04 또는 14.04 버전에서 실행하여야 합니다.
1. 메시지 릴레이로 작동하는 서버에는 고정 IP 주소와 열린 TCP 포트 2개가 있어야 합니다.
-
- `5672` for the _RabbitMQ_ message broker (can be changed in the _rabbitmq_ settings)
- `45679` for the HTTP POST interface (can be changed in the **relay.cfg** file)
@@ -124,7 +123,7 @@ Log in to the [account](https://rockblock.rock7.com/Operations) and register the
sudo rabbitmqctl set_permissions iridiumsbd ".*" ".*" ".*"
```
-5. Clone the [SatComInfrastructure](https://github.com/acfloria/SatComInfrastructure.git) repository:
+5. Clone the [SatComInfrastructure](https://github.com/acfloria/SatComInfrastructure) repository:
```sh
git clone https://github.com/acfloria/SatComInfrastructure.git
@@ -240,7 +239,6 @@ If in the terminal where the `udp2rabbit.py` script is running within a couple o
링크 표시기는 항상 우선 순위 링크의 이름을 표시합니다.
5. 이제 위성 통신 시스템을 사용할 준비가 되었습니다.우선 순위 링크(명령 전송 링크)는 다음 방법으로 결정됩니다.
-
- 사용자가 링크를 명령하지 않으면, 지연 시간이 큰 링크보다 일반적인 텔레메트리 링크가 선호됩니다.
- 기체가 시동을 켜고 텔레메트리 링크가 끊어지면(특정 시간 동안 MAVLink 메시지가 수신되지 않을 경우), 오토파일럿과 QGC는 일반 텔레메트리에서 긴 대기 시간 링크로 되돌아갑니다.
텔레메트리 링크가 복구되는 즉시 QGC와 자동 조종기가 다시 이 링크로 전환됩니다.
@@ -255,7 +253,6 @@ If in the terminal where the `udp2rabbit.py` script is running within a couple o
- 릴레이 서버의 설정을 확인하고 해당 설정이 올바른지 확인합니다(특히 IMEI).
- 비행기의 위성 통신 메시지는 지상국에 도착하지 않습니다.
-
- Check using the system console if the _iridiumsbd_ driver started and if it did that a signal from any satellite is received by the module:
```sh
@@ -267,7 +264,6 @@ If in the terminal where the `udp2rabbit.py` script is running within a couple o
- 링크가 연결되어 있고 설정이 정확한 지 확인하십시오.
- IridiumSBD 드라이버가 시작되지 않음:
-
- 기체를 재부팅합니다.
If that helps increase the sleep time in the `extras.txt` before the driver is started.
그래도 Pixhawk와 모듈이 동일한 접지 레벨을 유지하는지 확인할 수 있습니다. 모듈의 보레이트가 115200으로 설정되어 있는 지 확인하십시오.
diff --git a/docs/ko/assembly/quick_start_cuav_v5_plus.md b/docs/ko/assembly/quick_start_cuav_v5_plus.md
index e13e93b7a3..fdac7e47f9 100644
--- a/docs/ko/assembly/quick_start_cuav_v5_plus.md
+++ b/docs/ko/assembly/quick_start_cuav_v5_plus.md
@@ -54,7 +54,7 @@ The GPS/Compass module should be [mounted on the frame](../assembly/mount_gps_co
케이블을 사용하여 비행 제어 GPS에 연결합니다.
:::info
-If you use the [NEO V2 PRO GNSS (CAN GPS)](http://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html), please use the cable to connect to the flight control CAN interface.
+If you use the [NEO V2 PRO GNSS (CAN GPS)](https://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html), please use the cable to connect to the flight control CAN interface.
:::

@@ -134,7 +134,7 @@ Download **V5+** pinouts from [here](http://manual.cuav.net/V5-Plus.pdf).
- [Airframe build-log using CUAV v5+ on a DJI FlameWheel450](../frames_multicopter/dji_f450_cuav_5plus.md)
- [CUAV V5+ Manual](http://manual.cuav.net/V5-Plus.pdf) (CUAV)
-- [CUAV V5+ docs](http://doc.cuav.net/flight-controller/v5-autopilot/en/v5+.html) (CUAV)
+- [CUAV V5+ docs](https://doc.cuav.net/controller/v5-autopilot/en/v5+.html) (CUAV)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165) (CUAV)
- [CUAV Github](https://github.com/cuav) (CUAV)
- [Base board design reference](https://github.com/cuav/hardware/tree/master/V5_Autopilot/V5%2B/V5%2BBASE) (CUAV)
diff --git a/docs/ko/assembly/quick_start_cube.md b/docs/ko/assembly/quick_start_cube.md
index cde3aad10c..eab88780e3 100644
--- a/docs/ko/assembly/quick_start_cube.md
+++ b/docs/ko/assembly/quick_start_cube.md
@@ -13,7 +13,7 @@ This quick start guide shows how to power the _Cube_® flight cont
:::tip
The instructions apply to all Cube variants, including [Cube Black](../flight_controller/pixhawk-2.md), [Cube Yellow](../flight_controller/cubepilot_cube_yellow.md) and [Cube Orange](../flight_controller/cubepilot_cube_orange.md).
-Further/updated information may be available in the [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual) (Cube Docs).
+Further/updated information may be available in the [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube) (Cube Docs).
:::
## 소품
@@ -195,7 +195,7 @@ If connecting peripherals to the port labeled `GPS2`, assign the PX4 [serial por
## 설정
-Configuration is performed using [QGroundContro](http://qgroundcontrol.com/).
+Configuration is performed using [QGroundContro](https://qgroundcontrol.com/).
After downloading, installing and running _QGroundControl_, connect the board to your computer as shown.
@@ -220,6 +220,5 @@ PX4 펌웨어를 플래시한 후 [Program PX4IO(../getting_started/tunes.md#pro
- [Cube Yellow](../flight_controller/cubepilot_cube_yellow.md)
- [Cube Orange](../flight_controller/cubepilot_cube_orange.md)
- Cube 문서 (제조사) :
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/ko/assembly/quick_start_durandal.md b/docs/ko/assembly/quick_start_durandal.md
index 36c9dbfb24..e9cc3870de 100644
--- a/docs/ko/assembly/quick_start_durandal.md
+++ b/docs/ko/assembly/quick_start_durandal.md
@@ -148,7 +148,7 @@ The instructions below show how to connect the different types of receivers to _

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
@@ -214,6 +214,6 @@ QuadPlane specific configuration is covered here: [QuadPlane VTOL Configuration]
- [Durandal Overview](../flight_controller/durandal.md)
- [Durandal Technical Data Sheet](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Durandal_technical_data_sheet_90f8875d-8035-4632-a936-a0d178062077.pdf) (Holybro)
-- [Durandal Pinouts](https://holybro.com/collections/autopilot-flight-controllers/products/Durandal-Pinouts) (Holybro)
-- [Durandal_MB_H743sch.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/durandal/Durandal_MB_H743sch.pdf) (Durandal Schematics)
-- [STM32H743IIK_pinout.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/durandal/STM32H743IIK_pinout.pdf) (Durandal Pinmap)
+- [Durandal Pinouts](https://cdn.shopifycdn.net/s/files/1/0604/5905/7341/files/Durandal_Pinouts_v1.0.pdf?v=1693983344) (Holybro)
+- [Durandal_MB_H743sch.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/durandal/Durandal_MB_H743sch.pdf) (Durandal Schematics)
+- [STM32H743IIK_pinout.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/durandal/STM32H743IIK_pinout.pdf) (Durandal Pinmap)
diff --git a/docs/ko/assembly/quick_start_holybro_pix32_v5.md b/docs/ko/assembly/quick_start_holybro_pix32_v5.md
index e9caaccc14..f4e4459deb 100644
--- a/docs/ko/assembly/quick_start_holybro_pix32_v5.md
+++ b/docs/ko/assembly/quick_start_holybro_pix32_v5.md
@@ -124,7 +124,7 @@ The instructions below show how to connect the different types of receivers to _

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
@@ -182,5 +182,5 @@ QuadPlane specific configuration is covered here: [QuadPlane VTOL Configuration]
- [Pix32 v5 Technical Data Sheet](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Holybro_PIX32-V5_technical_data_sheet_v1.1.pdf)
- [Pix32 v5 Pinouts](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Holybro_Pix32-V5-Base-Mini-Pinouts.pdf)
- [Pix32 v5 Base Schematic Diagram](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Holybro_PIX32-V5-BASE-Schematic_diagram.pdf)
-- [Pix32 v5 Base Components Layout](https://holybro.com/manual/Holybro_PIX32-V5-BASE-ComponentsLayout.pdf)
+- [Pix32 v5 Base Components Layout](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Holybro_PIX32-V5-BASE-RC02-ComponentsLayout.pdf)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165).
diff --git a/docs/ko/assembly/quick_start_pixhawk.md b/docs/ko/assembly/quick_start_pixhawk.md
index 7daa0010ae..7285b84d48 100644
--- a/docs/ko/assembly/quick_start_pixhawk.md
+++ b/docs/ko/assembly/quick_start_pixhawk.md
@@ -83,7 +83,7 @@ You will need to [select a compatible transmitter/receiver](../getting_started/r
- PPM-SUM and S.BUS receivers connect to the **RC** ground, power and signal pins as shown.

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/ko/assembly/quick_start_pixhawk4.md b/docs/ko/assembly/quick_start_pixhawk4.md
index 7013183683..80b898f2c3 100644
--- a/docs/ko/assembly/quick_start_pixhawk4.md
+++ b/docs/ko/assembly/quick_start_pixhawk4.md
@@ -136,7 +136,7 @@ The instructions below show how to connect the different types of receivers to _

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
@@ -179,7 +179,7 @@ The wiring and configuration of optional/less common components is covered withi
## 핀배열
-[Pixhawk 4 Pinouts](https://holybro.com/manual/Pixhawk4-Pinouts.pdf) (Holybro)
+[Pixhawk 4 Pinouts](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Pixhawk4-Pinouts.pdf) (Holybro)
## 설정
@@ -192,6 +192,6 @@ QuadPlane specific configuration is covered here: [QuadPlane VTOL Configuration]
## 추가 정보
- [Pixhawk 4](../flight_controller/pixhawk4.md) (Overview page)
-- [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf)
-- [Pixhawk 4 Pinouts](https://holybro.com/manual/Pixhawk4-Pinouts.pdf) (Holybro)
+- [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/blob/main/docs/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf)
+- [Pixhawk 4 Pinouts](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Pixhawk4-Pinouts.pdf) (Holybro)
- [Pixhawk 4 Quick Start Guide (Holybro)](https://holybro.com/manual/Pixhawk4-quickstartguide.pdf)
diff --git a/docs/ko/assembly/quick_start_pixhawk4_mini.md b/docs/ko/assembly/quick_start_pixhawk4_mini.md
index 9118623b22..07a859496f 100644
--- a/docs/ko/assembly/quick_start_pixhawk4_mini.md
+++ b/docs/ko/assembly/quick_start_pixhawk4_mini.md
@@ -108,7 +108,7 @@ The instructions below show how to connect the different types of receivers to _

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **PPM RC** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/ko/assembly/quick_start_pixhawk5x.md b/docs/ko/assembly/quick_start_pixhawk5x.md
index 1ad45b3a6f..50dbfd52b5 100644
--- a/docs/ko/assembly/quick_start_pixhawk5x.md
+++ b/docs/ko/assembly/quick_start_pixhawk5x.md
@@ -93,7 +93,7 @@ You will need to [select a compatible transmitter/receiver](../getting_started/r
- Spektrum/DSM receivers connect to the **DSM/SBUS RC** input.
- PPM or SBUS receivers connect to the **RC IN** input port.
-PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC IN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC IN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/ko/assembly/quick_start_pixhawk6c.md b/docs/ko/assembly/quick_start_pixhawk6c.md
index 3303eb12ed..f23689f400 100644
--- a/docs/ko/assembly/quick_start_pixhawk6c.md
+++ b/docs/ko/assembly/quick_start_pixhawk6c.md
@@ -82,7 +82,7 @@ You will need to [select a compatible transmitter/receiver](../getting_started/r
- Spektrum/DSM receivers connect to the **DSM** input.
- PPM or SBUS receivers connect to the **PPM/SBUS** input port.
-PPM and PWM receivers that have an _individual wire for each channel_ must connect to the \*PPM/SBUS\*\* port \*via a PPM encoder\* [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+PPM and PWM receivers that have an _individual wire for each channel_ must connect to the \*PPM/SBUS\*\* port \*via a PPM encoder\* [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/ko/assembly/quick_start_pixhawk6x.md b/docs/ko/assembly/quick_start_pixhawk6x.md
index 1bc1d8e3b9..81778d083d 100644
--- a/docs/ko/assembly/quick_start_pixhawk6x.md
+++ b/docs/ko/assembly/quick_start_pixhawk6x.md
@@ -106,7 +106,7 @@ You will need to [select a compatible transmitter/receiver](../getting_started/r
- Spektrum/DSM receivers connect to the **DSM/SBUS RC** input.
- PPM or SBUS receivers connect to the **RC IN** input port.
-PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC IN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RC IN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/ko/assembly/quick_start_pixracer.md b/docs/ko/assembly/quick_start_pixracer.md
index 732bda58bf..bc571e0ce5 100644
--- a/docs/ko/assembly/quick_start_pixracer.md
+++ b/docs/ko/assembly/quick_start_pixracer.md
@@ -41,7 +41,7 @@ You will need to [select a compatible transmitter/receiver](../getting_started/r

-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
### 전원 모듈 (ACSP4)
diff --git a/docs/ko/assembly/vibration_isolation.md b/docs/ko/assembly/vibration_isolation.md
index ef1859e995..da11996a91 100644
--- a/docs/ko/assembly/vibration_isolation.md
+++ b/docs/ko/assembly/vibration_isolation.md
@@ -31,5 +31,5 @@
유용한 참고사항들입니다.
-- [An Introduction to Shock & Vibration Response Spectra, Tom Irvine](http://www.vibrationdata.com/tutorials2/srs_intr.pdf) (free paper)
+- [An Introduction to Shock & Vibration Response Spectra, Tom Irvine](https://www.vibrationdata.com/tutorials2/srs_intr.pdf) (free paper)
- [Structural Dynamics and Vibration in Practice - An Engineering Handbook, Douglas Thorby](https://books.google.ch/books?id=PwzDuWDc8AgC&printsec=frontcover) (preview).
diff --git a/docs/ko/camera/camera_intel_realsense_t265_vio.md b/docs/ko/camera/camera_intel_realsense_t265_vio.md
index 772786fc5e..d5f0a450c4 100644
--- a/docs/ko/camera/camera_intel_realsense_t265_vio.md
+++ b/docs/ko/camera/camera_intel_realsense_t265_vio.md
@@ -1,16 +1,18 @@
# Intel® RealSense™ Tracking Camera T265 (VIO)
-The [Intel® RealSense™ Tracking Camera T265](https://www.intelrealsense.com/tracking-camera-t265/) provides odometry information that can be used for [VIO](../computer_vision/visual_inertial_odometry.md), augmenting or replacing other positioning systems on PX4.
-
:::tip
-This camera is recommended, and is used in the [Visual Inertial Odometry (VIO) > Suggested Setup](../computer_vision/visual_inertial_odometry.md#suggested-setup).
+This camera is discontinued.
:::
+The _Intel® RealSense™ Tracking Camera T265_ provides odometry information that can be used for [VIO](../computer_vision/visual_inertial_odometry.md), augmenting or replacing other positioning systems on PX4.
+
+It is used in the [Visual Inertial Odometry (VIO) > Suggested Setup](../computer_vision/visual_inertial_odometry.md#suggested-setup).
+

## 구매처
-[Intel® RealSense™ Tracking Camera T265](https://www.intelrealsense.com/tracking-camera-t265/) (store.intelrealsense.com)
+No longer available.
## Setup Instructions
diff --git a/docs/ko/camera/fc_connected_camera.md b/docs/ko/camera/fc_connected_camera.md
index 64cd91dbe8..11b8dafc88 100644
--- a/docs/ko/camera/fc_connected_camera.md
+++ b/docs/ko/camera/fc_connected_camera.md
@@ -113,12 +113,12 @@ If it is your first time enabling the camera trigger app, remember to reboot aft
The camera trigger driver supports several backends - each for a specific application, controlled by the [TRIG_INTERFACE](../advanced_config/parameter_reference.md#TRIG_INTERFACE) parameter:
-| Number | 설명 |
-| ------ | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
-| 1 | Enables the GPIO interface. The AUX outputs are pulsed high or low (depending on the `TRIG_POLARITY` parameter) every [TRIG_INTERVAL](../advanced_config/parameter_reference.md#TRIG_INTERVAL) duration. This can be used to trigger most standard machine vision cameras directly. Note that on PX4FMU series hardware (Pixhawk, Pixracer, etc.), the signal level on the AUX pins is 3.3v. |
-| 2 | Enables the Seagull MAP2 interface. This allows the use of the [Seagull MAP2](http://www.seagulluav.com/product/seagull-map2/) to interface to a multitude of supported cameras. Pin/Channel 1 (camera trigger) and Pin/Channel 2 (mode selector) of the MAP2 should be connected to the lower and higher mapped [camera trigger pins](#trigger-output-pin-configuration). Using Seagull MAP2, PX4 also supports automatic power control and keep-alive functionalities of Sony Multiport cameras like the QX-1. |
-| 3 | This mode enables MAVLink cameras that used the legacy [MAVLink interface listed above](#mavlink-command-interface). The messages are automatically emitted on the MAVLink `onboard` channel when found in missions. PX4 emits the `CAMERA_TRIGGER` MAVLink message when a camera is triggered, by default to the `onboard` channel (if this is not used, custom stream will need to be enabled). [Simple MAVLink cameras](../camera/mavlink_v1_camera.md) explains this use case in more detail. |
-| 4 | Enables the generic PWM interface. This allows the use of [infrared triggers](https://hobbyking.com/en_us/universal-remote-control-infrared-shutter-ir-rc-1g.html) or servos to trigger your camera. |
+| Number | 설명 |
+| ------ | ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
+| 1 | Enables the GPIO interface. The AUX outputs are pulsed high or low (depending on the `TRIG_POLARITY` parameter) every [TRIG_INTERVAL](../advanced_config/parameter_reference.md#TRIG_INTERVAL) duration. This can be used to trigger most standard machine vision cameras directly. Note that on PX4FMU series hardware (Pixhawk, Pixracer, etc.), the signal level on the AUX pins is 3.3v. |
+| 2 | Enables the Seagull MAP2 interface. This allows the use of the [Seagull MAP2](https://www.seagulluav.com/product/seagull-map2/) to interface to a multitude of supported cameras. Pin/Channel 1 (camera trigger) and Pin/Channel 2 (mode selector) of the MAP2 should be connected to the lower and higher mapped [camera trigger pins](#trigger-output-pin-configuration). Using Seagull MAP2, PX4 also supports automatic power control and keep-alive functionalities of Sony Multiport cameras like the QX-1. |
+| 3 | This mode enables MAVLink cameras that used the legacy [MAVLink interface listed above](#mavlink-command-interface). The messages are automatically emitted on the MAVLink `onboard` channel when found in missions. PX4 emits the `CAMERA_TRIGGER` MAVLink message when a camera is triggered, by default to the `onboard` channel (if this is not used, custom stream will need to be enabled). [Simple MAVLink cameras](../camera/mavlink_v1_camera.md) explains this use case in more detail. |
+| 4 | Enables the generic PWM interface. This allows the use of [infrared triggers](https://hobbyking.com/en_us/universal-remote-control-infrared-shutter-ir-rc-1g.html) or servos to trigger your camera. |
### Trigger Output Pin Configuration
diff --git a/docs/ko/camera/mavlink_v2_camera.md b/docs/ko/camera/mavlink_v2_camera.md
index 3b10500b11..8802875469 100644
--- a/docs/ko/camera/mavlink_v2_camera.md
+++ b/docs/ko/camera/mavlink_v2_camera.md
@@ -137,9 +137,9 @@ Generic/extensible camera managers:
- [MAVLink Camera Manager](https://github.com/mavlink/mavlink-camera-manager) - Extensible cross-platform MAVLink Camera Server built on top of GStreamer and Rust-MAVLink.
- [Dronecode Camera Manager](https://camera-manager.dronecode.org/en/) - Adds Camera Protocol interface for cameras connected to Linux computer.
-Camera-specfic camera managers:
+Camera-specific camera managers:
-- [SIYI A8 mini camera manager](https://github.com/julianoes/siyi-a8-mini-camera-manager) - MAVSDK-plugin based camera manager for the [SIYI A8 mini](https://shop.siyi.biz/products/siyi-a8-mini) (includes tutorial).
+- [SIYI A8 mini camera manager](https://github.com/julianoes/siyi-a8-mini-camera-manager) - MAVSDK-plugin based camera manager for the [SIYI A8 mini](https://shop.siyi.biz/products/siyi-a8-mini-gimbal-camera) (includes tutorial).
::: tip
This is a good example of how MAVSDK can be used to create a MAVLink camera protocol interface for a particular camera.
@@ -150,6 +150,6 @@ When using a camera manager you connect the companion computer to the flight con
More information about camera manager and companion computer setups can be found in:
-- [SIYI A8 mini camera manager](https://github.com/julianoes/siyi-a8-mini-camera-manager) - Tutorial for integrating with the [SIYI A8 mini](https://shop.siyi.biz/products/siyi-a8-mini) using a MAVSDK-based camera manager running on a Raspberry Pi companion computer.
+- [SIYI A8 mini camera manager](https://github.com/julianoes/siyi-a8-mini-camera-manager) - Tutorial for integrating with the [SIYI A8 mini](https://shop.siyi.biz/products/siyi-a8-mini-gimbal-camera) using a MAVSDK-based camera manager running on a Raspberry Pi companion computer.
- [Using a Companion Computer with Pixhawk Controllers](../companion_computer/pixhawk_companion.md)
- [Companion Computers > Companion Computer Software](../companion_computer/index.md#companion-computer-software): In particular note [MAVLink-Router](https://github.com/mavlink-router/mavlink-router), which you can setup to route MAVLink traffic between a serial port and an IP link (or other camera manager interface).
diff --git a/docs/ko/can/index.md b/docs/ko/can/index.md
index 2f949dc4a6..137f639189 100644
--- a/docs/ko/can/index.md
+++ b/docs/ko/can/index.md
@@ -38,7 +38,7 @@ The following diagram shows an example of a CAN bus connecting a flight controll
The diagram does not show any power wiring.
Refer to your manufacturer instructions to confirm whether components require separate power or can be powered from the CAN bus itself.
-For more information, see [Cyphal/CAN device interconnection](https://kb.zubax.com/pages/viewpage.action?pageId=2195476) (kb.zubax.com).
+For more information, see [Cyphal/CAN device interconnection](https://wiki.zubax.com/public/cyphal/CyphalCAN-device-interconnection?pageId=2195476) (kb.zubax.com).
While the article is written with the Cyphal protocol in mind, it applies equally to DroneCAN hardware and any other CAN setup.
For more advanced scenarios, consult with [On CAN bus topology and termination](https://forum.opencyphal.org/t/on-can-bus-topology-and-termination/1685).
diff --git a/docs/ko/companion_computer/auterion_skynode.md b/docs/ko/companion_computer/auterion_skynode.md
index 665ed28f1e..bd27ac5897 100644
--- a/docs/ko/companion_computer/auterion_skynode.md
+++ b/docs/ko/companion_computer/auterion_skynode.md
@@ -1,6 +1,6 @@
-# Auterion Skynode
+# Auterion Skynode X
-[Skynode](https://auterion.com/product/skynode/) is a powerful flight computer that combines a mission computer, flight controller, video streaming, networking, and cellular connection, in a single tightly integrated device.
+[Skynode](https://auterion.com/product/skynode-x/) is a powerful flight computer that combines a mission computer, flight controller, video streaming, networking, and cellular connection, in a single tightly integrated device.

@@ -12,10 +12,11 @@ Auterion OS and Skynode allow seamless integration with Auterion's other softwar
For information about Auterion and Skynode:
- [auterion.com](https://auterion.com/)
-- [Skynode](https://auterion.com/product/skynode/) (auterion.com)
+- [Skynode X](https://auterion.com/product/skynode-x/) (auterion.com)
- Skynode Guides:
- - [Manufacturer's Guide](https://docs.auterion.com/manufacturers/getting-started/readme)
- - [App Developer's Guide](https://docs.auterion.com/developers/getting-started/readme)
+ - [Vehicle Operation](https://docs.auterion.com/vehicle-operation/auterion-sign-up)
+ - [App Development](https://docs.auterion.com/app-development/app-development)
+ - [Hardware Integration](https://docs.auterion.com/app-development/app-development)
## Skynode with Vanilla PX4
@@ -34,7 +35,7 @@ Upstream PX4 will generally work, with the following caveats:
PX4 `px4_fmu-v5x` binaries for Skynode are built from source using the normal [developer environment](../dev_setup/dev_env.md) and [build commands](../dev_setup/building_px4.md), and are uploaded using either `upload_skynode_usb` or `upload_skynode_wifi` upload targets.
-`upload_skynode_usb` and `upload_skynode_wifi` connect to Skynode via SSH over a network interface using the default (fixed) IP addresses for [USB](https://docs.auterion.com/manufacturers/avionics/skynode/advanced-configuration/connecting-to-skynode) and [WiFi](https://docs.auterion.com/manufacturers/avionics/skynode/advanced-configuration/configuration), and upload a TAR compressed binary to the mission computer.
+`upload_skynode_usb` and `upload_skynode_wifi` connect to Skynode via SSH over a network interface using the default (fixed) IP addresses for USB and WiFi, respectively (see [AuterionOS System Guide > Building and Flashing PX4 Firmware](https://docs.auterion.com/hardware-integration/auterionos-system-guide/flashing-px4-upstream-firmware)), and upload a TAR compressed binary to the mission computer.
The mission computer then decompresses the binary and installs it to the flight controller.
:::info
diff --git a/docs/ko/companion_computer/companion_computer_peripherals.md b/docs/ko/companion_computer/companion_computer_peripherals.md
index 3409f6fcc2..f709e93816 100644
--- a/docs/ko/companion_computer/companion_computer_peripherals.md
+++ b/docs/ko/companion_computer/companion_computer_peripherals.md
@@ -30,7 +30,7 @@ A few "turnkey" options are listed below:
[mro_usb_ftdi_serial_to_jst_gh]: https://store.mrobotics.io/USB-FTDI-Serial-to-JST-GH-p/mro-ftdi-jstgh01-mr.htm
[sparkfun_ftdi basic_breakout]: https://www.sparkfun.com/products/9873
-You can also use an off-the-shelf FTDI cable [like this one](https://www.sparkfun.com/products/9717) and connect it to flight controller using the appropriate header adaptor
+You can also use an off-the-shelf FTDI cable [like this one](https://www.sparkfun.com/ftdi-cable-5v-vcc-3-3v-i-o.html) and connect it to flight controller using the appropriate header adaptor
(JST-GH connectors are specified in the Pixhawk standard, but you should confirm the connectors for your flight controller).
### Logic Level Shifters
@@ -40,7 +40,7 @@ In order to resolve this, a level shifter can be implemented to safely convert t
Options include:
-- [SparkFun Logic Level Converter - Bi-Directional](https://www.sparkfun.com/products/12009)
+- [SparkFun Logic Level Converter - Bi-Directional](https://www.sparkfun.com/sparkfun-logic-level-converter-bi-directional.html)
- [4-channel I2C-safe Bi-directional Logic Level Converter - BSS138](https://www.adafruit.com/product/757)
## Cameras
@@ -78,7 +78,7 @@ However NAT has no way to know where to direct the traffic from an arbitrary ext
:::
A common approach is to set up a virtual private network between the companion and GCS computer (i.e. install a VPN system like [zerotier](https://www.zerotier.com/) on both computers).
-The companion then uses [mavlink-router](https://github.com/intel/mavlink-router) to route traffic between the serial interface (flight controller) and GCS computer on the VPN network.
+The companion then uses [mavlink-router](https://github.com/mavlink-router/mavlink-router) to route traffic between the serial interface (flight controller) and GCS computer on the VPN network.
This method has the benefit that the GCS computer address can be static within the VPN, so the configuration of the _mavlink router_ does not need to change over time.
In addition, the communication link is secure because all VPN traffic is encrypted (MAVLink 2 itself does not support encryption).
@@ -90,5 +90,6 @@ This approach means that you do not need to know the IP address of the GCS compu
Some USB modules that are known to work include:
-- [Huawei E8372](https://consumer.huawei.com/en/mobile-broadband/e8372/) and [Huawei E3372](https://consumer.huawei.com/en/mobile-broadband/e3372/)
- - The _E8372_ includes WiFi which you can use to configure the SIM while it is plugged into the companion (making the development workflow a little easier). The _E3372_ lacks WiFi, so you have to configure it by plugging the stick into a laptop.
+- [Huawei E8372](https://consumer.huawei.com/au/support/routers/e8372/) and [Huawei E3372](https://consumer.huawei.com/au/support/routers/e3372/)
+ - The _E8372_ includes WiFi which you can use to configure the SIM while it is plugged into the companion (making the development workflow a little easier).
+ The _E3372_ lacks WiFi, so you have to configure it by plugging the stick into a laptop.
diff --git a/docs/ko/companion_computer/holybro_pixhawk_jetson_baseboard.md b/docs/ko/companion_computer/holybro_pixhawk_jetson_baseboard.md
index bd13578d42..235e6930b5 100644
--- a/docs/ko/companion_computer/holybro_pixhawk_jetson_baseboard.md
+++ b/docs/ko/companion_computer/holybro_pixhawk_jetson_baseboard.md
@@ -4,7 +4,7 @@ The [Holybro Pixhawk Jetson Baseboard](https://holybro.com/products/pixhawk-jets

-The board comes with either the [Jetson Orin NX (16GB RAM)](https://holybro.com/products/nvidia-jetson-orin-nx-16g) or [Jetson Orin Nano (4GB RAM)](https://holybro.com/products/nvidia-jetson-orin-nx-16g?variant=44391410598077).
+The board comes with either the _Jetson Orin NX_ (16GB RAM) or _Jetson Orin Nano_ (4GB RAM) (see [NVIDIA Jetson Orin™](https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-orin/)).
It can be used with any Pixhawk Autopilot Bus (PAB) specification-compliant Pixhawk flight controller, such as the Pixhawk 6 or Pixhawk 6X.
This guide walks through the process of setting up the board and connecting to PX4, including:
@@ -44,7 +44,6 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
[Dimensions and weight](https://docs.holybro.com/autopilot/pixhawk-baseboards/pixhawk-jetson-baseboard/dimension-and-weight) (Holybro)
- 크기
-
- 126 x 80 x 45mm (with Jetson Orin NX + Heatsink/Fan & FC Module)
- 126 x 80 x 22.9mm (without Jetson and FC Module)
@@ -56,37 +55,30 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
:::tab Jetson connectors
- 2x Gigabit Ethernet Port
-
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- Ethernet Switch powered by the same circuit as the Pixhawk
- 8-pin JST-GH
- RJ45
- 2x MIPI CSI Camera Inputs
-
- 4 Lanes each
- 22-Pin Raspberry Pi Cam FFC
- 2x USB 3.0 Host Port
-
- USB A
- 5A Current Limit
- 2x USB 2.0 Host Port
-
- 5-Pin JST-GH
- 0A Current Limit
- USB 2.0 for Programming/Debugging
-
- USB-C
- 2 Key M 2242/2280 for NVMe SSD
-
- PCIEx4
- 2 Key E 2230 for WiFi/BT
-
- PCIEx2
- USB
- UART
@@ -95,27 +87,21 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
- Mini HDMI Out
- 4x GPIO
-
- 6-pin JST-GH
- CAN Port
-
- Connected to Autopilot's CAN2 (4 Pin JST-GH)
- SPI Port
-
- 7-Pin JST-GH
- I2C Port
-
- 4-Pin JST-GH
- I2S Port
-
- 7-Pin JST-GH
- 2x UART Port
-
- 1 for debug
- 1 connected to Autopilot's telem2
@@ -128,12 +114,10 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
:::tab Autopilot connectors
- Pixhawk Autopilot Bus Interface
-
- 100 Pin Hirose DF40
- 50 Pin Hirose DF40
- Redundant Digital Power Module Inputs
-
- I2C Power Monitor Support
- 2x 6-Pin Molex CLIK-Mate
@@ -142,66 +126,52 @@ This information comes from the [Holybro Pixhawk-Jetson Baseboard Documentation]
- Overvoltage Protection
- 정격 전압
-
- 최대 입력 전압: 6V
- USB 전원 입력: 4.75~5.25V
- Full GPS Plus Safety Switch Port
-
- 10-Pin JST-GH
- Secondary (GPS2) Port
-
- 6-Pin JST-GH
- 2x CAN Ports
-
- 4-Pin JST-GH
- 3x Telemetry Ports with Flow Control
-
- 2x 6-Pin JST-GH
- 1 is connected to Jetson's `UART1` Port
- 16 PWM Outputs
-
- 2x 10-Pin JST-GH
- UART4 & I2C Port
-
- 6-Pin JST-GH
- 2x Gigabit Ethernet Port
-
- Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
- 8-Pin JST-GH
- RJ45
- AD & IO
-
- 8-Pin JST-GH
- USB 2.0
-
- USB-C
- 4-Pin JST-GH
- DSM Input
-
- 3-Pin JST-ZH 1.5mm Pitch
- RC In
-
- PPM/SBUS
- 5-Pin JST-GH
- SPI Port
-
- External Sensor Bus (SPI5)
- 11-Pin JST-GH
- 2x Debug Port
-
- 1 for FMU
- 1 for IO
- 10-Pin JST-SH
@@ -1333,7 +1303,7 @@ You can now start your ROS2 nodes and continue the development.
You can test the Client and agent by using the `sensor_combined` example in [Build ROS 2 Workspace](../ros2/user_guide.md#build-ros-2-workspace) (ROS2 User Guide).
:::tip
-[VSCode over SSH](https://code.visualstudio.com/learn/develop-cloud/ssh-lab-machines) enables faster development and application of changes to your ROS 2 code!
+[VSCode over SSH](https://code.visualstudio.com/docs/remote/ssh) enables faster development and application of changes to your ROS 2 code!
:::
After getting to the point of running the example:
diff --git a/docs/ko/companion_computer/index.md b/docs/ko/companion_computer/index.md
index 558a50b5ad..481e8c1693 100644
--- a/docs/ko/companion_computer/index.md
+++ b/docs/ko/companion_computer/index.md
@@ -42,7 +42,7 @@ Larger high power examples:
- [NXP NavQPlus](https://nxp.gitbook.io/navqplus/user-contributed-content/ros2/microdds)
- [Nvidia Jetson TX2](https://developer.nvidia.com/embedded/jetson-tx2)
-* [Intel NUC](https://www.intel.com/content/www/us/en/products/details/nuc.html)
+* [Intel NUC](https://www.asus.com/au/content/nuc-overview/)
* [Gigabyte Brix](https://www.gigabyte.com/Mini-PcBarebone/BRIX)
Small/lower power examples:
@@ -78,7 +78,7 @@ You can also write your own custom MAVLink libraries from scratch:
You will need a router if you need to bridge MAVLink from the vehicle to a ground station or IP network, or if you need multiple connections:
-- [MAVLink Router](https://github.com/intel/mavlink-router) (recommended)
+- [MAVLink Router](https://github.com/mavlink-router/mavlink-router) (recommended)
- [MAVProxy](https://ardupilot.org/mavproxy/)
## Ethernet Setup
diff --git a/docs/ko/companion_computer/video_streaming_wfb_ng_wifi.md b/docs/ko/companion_computer/video_streaming_wfb_ng_wifi.md
index e92fe2a43a..c8c752c6cc 100644
--- a/docs/ko/companion_computer/video_streaming_wfb_ng_wifi.md
+++ b/docs/ko/companion_computer/video_streaming_wfb_ng_wifi.md
@@ -20,7 +20,7 @@ The high level benefits of _WFB-ng_ include:
- Bidirectional telemetry link (MAVLink).
- TCP/IP tunnel.
- Automatic TX diversity - use multiple cards on the ground to avoid antenna tracker.
-- Full link encryption and authentication (using [libsodium](https://download.libsodium.org/doc/)).
+- Full link encryption and authentication (using [libsodium](https://doc.libsodium.org/)).
- Aggregation of MAVLink packets (pack small packets into batches before transmitting).
- Enhanced [OSD](https://github.com/svpcom/wfb-ng-osd) for Raspberry PI or generic linux desktop with gstreamer.
@@ -36,21 +36,19 @@ The vehicle setup consists of:
- A camera.
These have been tested:
-
- [Raspberry Pi camera](https://www.raspberrypi.org/products/camera-module-v2/) connected via CSI.
- - [Logitech camera C920](https://www.logitech.com/en-us/product/hd-pro-webcam-c920?crid=34) connected via USB
+ - [Logitech camera C920](https://support.logi.com/hc/en-us/articles/360024326953-Getting-started-HD-Pro-Webcam-C920) connected via USB
-- WiFi module [ALPHA AWUS036ACH](https://www.alfa.com.tw/products_detail/1.htm) or any other **RTL8812au** card.
+- WiFi module [ALPHA AWUS036ACH](https://www.alfa.com.tw/products/awus036ach_1?variant=40319795789896) or any other **RTL8812au** card.
### Ground Station
- Ground Station Computer.
These options have been tested:
-
- Any Linux computer with a USB port (tested on Ubuntu 18.04 x86-64)
- A computer with any OS running QGround control and Raspberry PI connected via Ethernet (RPi provides the wifi connection).
-- WiFi module [ALPHA AWUS036ACH](https://www.alfa.com.tw/products_detail/1.htm) or any other **RTL8812au** card.
+- WiFi module [ALPHA AWUS036ACH](https://www.alfa.com.tw/products/awus036ach_1?variant=40319795789896) or any other **RTL8812au** card.
See [WFB-ng wiki > WiFi hardware](https://github.com/svpcom/wfb-ng/wiki/WiFi-hardware) for more information on supported modules.
## Hardware Modification
@@ -125,7 +123,7 @@ If you need a higher bandwidth you can use other MCS index (for example 2 or gre
## Antennas and Diversity
-For simple cases you can use omnidirectional antennas with linear (that bundled with wifi cards) or circular leaf ([circularly polarized Coverleaf Antenna](http://www.antenna-theory.com/antennas/cloverleaf.php)) polarization.
+For simple cases you can use omnidirectional antennas with linear (that bundled with wifi cards) or circular leaf ([circularly polarized Coverleaf Antenna](https://www.antenna-theory.com/antennas/cloverleaf.php)) polarization.
If you want to setup long distance link you can use multiple wifi adapters with directional and omnidirectional antennas. TX/RX diversity for multiple adapters supported out of box (just add multiple NICs to `/etc/default/wifibroadcast`).
If your WiFi adapter has two antennas (like Alfa AWU036ACH) TX diversity is implemented via [STBC](https://en.wikipedia.org/wiki/Space%E2%80%93time_block_code).
Cards with 4 ports (like Alfa AWUS1900) are currently not supported.
diff --git a/docs/ko/complete_vehicles_fw/index.md b/docs/ko/complete_vehicles_fw/index.md
index 3364de7799..336ab4bcf3 100644
--- a/docs/ko/complete_vehicles_fw/index.md
+++ b/docs/ko/complete_vehicles_fw/index.md
@@ -12,7 +12,7 @@ You can find others on [px4.io](https://px4.io/ecosystem/commercial-systems/) an
This section contains consumer vehicles that run a _custom_ version of PX4 (supported by their vendors).
These may or may not be updatable to run "vanilla" PX4.
-- [Sentera PXH](https://sentera.com/products/fieldcapture/ag-drones/phx/)
+- [Sentera PXH](https://senterasensors.com/phx/)
:::warning
This flight controller has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
@@ -27,7 +27,6 @@ It is intended primarily for academic and commercial developers.
- 32 비트 Arm® Cortex®-M3, 24MHz, 8KB SRAM
- 내장 센서 :
-
- 가속도계/자이로스코프 : ICM-20689
- 가속도계/자이로스코프 : BMI055
- 자력계 : IST8310
@@ -147,5 +146,4 @@ The complete set of supported configurations can be seen in the [Airframes Refer
## 추가 정보
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165).
-- [CUAV v5 docs](http://doc.cuav.net/flight-controller/v5-autopilot/en/v5.html)
- [CUAV Github](https://github.com/cuav)
diff --git a/docs/ko/flight_controller/cuav_v5_nano.md b/docs/ko/flight_controller/cuav_v5_nano.md
index a737c367e6..9a3d4cdeeb 100644
--- a/docs/ko/flight_controller/cuav_v5_nano.md
+++ b/docs/ko/flight_controller/cuav_v5_nano.md
@@ -17,7 +17,7 @@ The V5 nano is similar to the [CUAV V5+](../flight_controller/cuav_v5_plus.md),
주요 기능은 다음과 같습니다.
-- Full compatibility with the [Pixhawk project](https://pixhawk.org/) **FMUv5** design standard and uses the [Pixhawk Connector Standard](https://pixhawk.org/pixhawk-connector-standard/) for all external interfaces.
+- Full compatibility with the [Pixhawk project](https://pixhawk.org/) **FMUv5** design standard and uses the [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf) for all external interfaces.
- 더 안정적이고 신뢰할 수 있는 센서와 함께 FMU v3보다 고급 프로세서, RAM 및 플래시 메모리.
- PX4와 펌웨어 호환.
- I/O 핀을 위한 넉넉한 2.6mm 간격으로 모든 인터페이스를 더 쉽게 사용할 수 있습니다.
@@ -31,7 +31,6 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
메인 FMU 프로세서: STM32F765◦32 비트 Arm® Cortex®-M7, 216MHz, 2MB 메모리, 512KB RAM
- 내장 센서 :
-
- 가속도/자이로: ICM-20689
- 가속도/자이로: ICM-20602
- 가속/자이로: BMI055
@@ -39,7 +38,6 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
- 기압계: MS5611
- 인터페이스 : 8개의 PWM 출력
-
- FMU의 전용 PWM/캡처 입력 3 개
- CPPM 전용 RC 입력
- Spektrum/DSM 및 S.Bus 전용 R/C 입력
@@ -186,7 +184,7 @@ CUAV는 몇 가지 차별화된 디자인을 채택하고, 아래에서 설명
The _Neo v2.0 GPS_ that is recommended for use with _CUAV V5+_ and _CUAV V5 nano_ is not fully compatible with other Pixhawk flight controllers (specifically, the buzzer part is not compatible and there may be issues with the safety switch).
-The UAVCAN [NEO V2 PRO GNSS receiver](http://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html) can also be used, and is compatible with other flight controllers.
+The UAVCAN [NEO V2 PRO GNSS receiver](https://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html) can also be used, and is compatible with other flight controllers.
diff --git a/docs/ko/flight_controller/cuav_v5_plus.md b/docs/ko/flight_controller/cuav_v5_plus.md
index a2d1d5379a..fb3a598cd3 100644
--- a/docs/ko/flight_controller/cuav_v5_plus.md
+++ b/docs/ko/flight_controller/cuav_v5_plus.md
@@ -14,7 +14,7 @@ CUAV®와 PX4팀이 공동으로 설계하였습니다.
주요 기능은 다음과 같습니다.
-- Full compatibility with the [Pixhawk project](https://pixhawk.org/) **FMUv5** design standard and uses the [Pixhawk Connector Standard](https://pixhawk.org/pixhawk-connector-standard/) for all external interfaces.
+- Full compatibility with the [Pixhawk project](https://pixhawk.org/) **FMUv5** design standard and uses the [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf) for all external interfaces.
- 더 안정적이고 신뢰할 수 있는 센서와 함께 FMU v3보다 고급 프로세서, RAM 및 플래시 메모리.
- PX4와 펌웨어 호환.
- 모듈식 설계를 통해 사용자는 자신의 캐리어 보드를 설정할 수 있습니다.
@@ -34,7 +34,6 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
- 32 비트 Arm® Cortex®-M3, 24MHz, 8KB SRAM
- 내장 센서 :
-
- 가속도계/자이로스코프 : ICM-20689
- 가속도계/자이로스코프 : BMI055
- 자력계 : IST8310
@@ -62,7 +61,6 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
- Dimensions: 85.5\*42\*33mm
- 기타 특성:
-
- 작동 온도: -20 ~ 80°c (측정 값)
## 구매처
@@ -206,7 +204,7 @@ CUAV는 몇 가지 차별화된 디자인을 채택하고, 아래에서 설명
The _Neo v2.0 GPS_ recommended for use with _CUAV V5+_ and _CUAV V5 nano_ is not fully compatible with other Pixhawk flight controllers (specifically, the buzzer part is not compatible and there may be issues with the safety switch).
-The UAVCAN [NEO V2 PRO GNSS receiver](http://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html) can also be used, and is compatible with other flight controllers.
+The UAVCAN [NEO V2 PRO GNSS receiver](https://doc.cuav.net/gps/neo-series-gnss/en/neo-v2-pro.html) can also be used, and is compatible with other flight controllers.
@@ -240,7 +238,7 @@ SBUS/DSM/RSSI 인터페이스에 다른 장비(RC 수신기 제외)를 연결하
## 추가 정보
- [CUAV V5+ Manual](http://manual.cuav.net/V5-Plus.pdf)
-- [CUAV V5+ docs](http://doc.cuav.net/flight-controller/v5-autopilot/en/v5+.html)
+- [CUAV V5+ docs](https://doc.cuav.net/controller/v5-autopilot/en/v5+.html)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165)
- [CUAV Github](https://github.com/cuav)
- [Base board design reference](https://github.com/cuav/hardware/tree/master/V5_Autopilot/V5%2B/V5%2BBASE)
diff --git a/docs/ko/flight_controller/cuav_x7.md b/docs/ko/flight_controller/cuav_x7.md
index 35ce6a7378..48db23d9c2 100644
--- a/docs/ko/flight_controller/cuav_x7.md
+++ b/docs/ko/flight_controller/cuav_x7.md
@@ -1,4 +1,11 @@
-# CUAV X7 비행 컨트롤러
+# CUAV X7 Flight Controller (Discontinued)
+
+
+
+:::warning
+This flight controller has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
+It has been superseded by the [CUAV X7+](https://doc.cuav.net/controller/x7/en/).
+:::
:::warning
PX4 does not manufacture this (or any) autopilot.
@@ -41,7 +48,6 @@ The manufacturer [CUAV Docs](https://doc.cuav.net/flight-controller/x7/en/) are
- 메인 FMU 프로세서: STM32H743
- 내장 센서 :
-
- 가속도계/자이로스코프 : ICM-20689
- 가속도계/자이로스코프 : ICM-20649
- 가속도계/자이로스코프 : BMI088
@@ -85,7 +91,7 @@ When it runs PX4 firmware, only 8 pwm works, the remaining 6 pwm are still being
## 배선
-[CUAV X7 Wiring Quickstart](http://doc.cuav.net/flight-controller/x7/en/quick-start/quick-start-x7.html)
+[CUAV X7 Wiring Quickstart](https://doc.cuav.net/controller/x7/en/quick-start/quick-start-x7-plus.html)
## 크기와 핀배열
@@ -177,5 +183,5 @@ The complete set of supported configurations can be seen in the [Airframes Refer
## 추가 정보
- [Quick start](http://doc.cuav.net/flight-controller/x7/en/quick-start/quick-start-x7.html)
-- [CUAV docs](http://doc.cuav.net)
+- [CUAV docs](https://doc.cuav.net/)
- [x7 schematic](https://github.com/cuav/hardware/tree/master/X7_Autopilot)
diff --git a/docs/ko/flight_controller/cubepilot_cube_orange.md b/docs/ko/flight_controller/cubepilot_cube_orange.md
index c69b84636a..63cbac179e 100644
--- a/docs/ko/flight_controller/cubepilot_cube_orange.md
+++ b/docs/ko/flight_controller/cubepilot_cube_orange.md
@@ -19,7 +19,7 @@ This is automatically configured and enabled in the default PX4 firmware.
Cube에는 2 개의 IMU에 진동 차단이 포함되어 있으며, 세 번째 고정 IMU는 참조 백업용으로 사용됩니다.
:::tip
-The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview) contain detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview#differences-between-cube-colours).
+The manufacturer [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube) contains detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube/introduction/specifications).
:::
## 주요 특징
@@ -53,7 +53,7 @@ The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/th
- 400 MHz
- 1 MB RAM
- 2MB 플래시 \(완전 액세스 가능\)
-- **Failsafe co-processor:**
+- **Failsafe co-processor:**
- STM32F103 (32bit _ARM Cortex-M3_)
- 24 MHz
- 8 KB SRAM
@@ -244,6 +244,5 @@ Board schematics and other documentation can be found here: [The Cube Project](h
- [Cube Wiring Quickstart](../assembly/quick_start_cube.md)
- Cube 문서 (제조사) :
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/ko/flight_controller/cubepilot_cube_orangeplus.md b/docs/ko/flight_controller/cubepilot_cube_orangeplus.md
index a6366c98ec..b85f689284 100644
--- a/docs/ko/flight_controller/cubepilot_cube_orangeplus.md
+++ b/docs/ko/flight_controller/cubepilot_cube_orangeplus.md
@@ -20,7 +20,7 @@ This is automatically configured and enabled in the default PX4 firmware.
Cube에는 2 개의 IMU에 진동 차단이 포함되어 있으며, 세 번째 고정 IMU는 참조 백업용으로 사용됩니다.
:::tip
-The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview) contain detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview#differences-between-cube-colours).
+The manufacturer [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube) contains detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube/introduction/specifications).
:::
## 주요 특징
@@ -54,7 +54,7 @@ The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/th
- 400 MHz
- 1 MB RAM
- 2MB 플래시 \(완전 액세스 가능\)
-- **Failsafe co-processor:**
+- **Failsafe co-processor:**
- STM32F103 (32bit _ARM Cortex-M3_)
- 24 MHz
- 8 KB SRAM
@@ -249,6 +249,5 @@ Board schematics and other documentation can be found here: [The Cube Project](h
- [Cube Wiring Quickstart](../assembly/quick_start_cube.md)
- Cube 문서 (제조사) :
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/ko/flight_controller/cubepilot_cube_yellow.md b/docs/ko/flight_controller/cubepilot_cube_yellow.md
index 76d7cc21f4..f4e050f757 100644
--- a/docs/ko/flight_controller/cubepilot_cube_yellow.md
+++ b/docs/ko/flight_controller/cubepilot_cube_yellow.md
@@ -15,7 +15,7 @@ The Cube Yellow flight controller is a flexible autopilot intended primarily for
Cube에는 2 개의 IMU에 진동 차단이 포함되어 있으며, 세 번째 고정 IMU는 참조 백업용으로 사용됩니다.
:::tip
-The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview) contain detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview#differences-between-cube-colours).
+The manufacturer [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube) contains detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube/introduction/specifications).
:::
## 주요 특징
@@ -49,7 +49,7 @@ The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/th
- 400 MHz
- 512 KB MB RAM
- 2 MB Flash
-- **Failsafe co-processor:**
+- **Failsafe co-processor:**
- STM32F100 (32bit _ARM Cortex-M3_)
- 24 MHz
- 8 KB SRAM
@@ -142,6 +142,5 @@ Cube의 CAN1과 CAN2의 실크 스크린이 뒤집힙니다. CAN1은 CAN2이고
- [Cube Wiring Quickstart](../assembly/quick_start_cube.md)
- Cube 문서 (제조사) :
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/ko/flight_controller/durandal.md b/docs/ko/flight_controller/durandal.md
index 2a78e66ab5..df406d3053 100644
--- a/docs/ko/flight_controller/durandal.md
+++ b/docs/ko/flight_controller/durandal.md
@@ -211,7 +211,7 @@ The complete set of supported configurations can be seen in the [Airframes Refer
## 핀배열
_Durandal_ pinouts are listed below.
-These can also be downloaded from [here](https://holybro.com/collections/autopilot-flight-controllers/products/Durandal-Pinouts).
+These can also be downloaded from [here](https://cdn.shopifycdn.net/s/files/1/0604/5905/7341/files/Durandal_Pinouts_v1.0.pdf?v=1693983344).
### 상단 핀배열
@@ -422,4 +422,4 @@ These can also be downloaded from [here](https://holybro.com/collections/autopil
- [Durandal Wiring QuickStart](../assembly/quick_start_durandal.md)
- [Durandal Technical Data Sheet](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Durandal_technical_data_sheet_90f8875d-8035-4632-a936-a0d178062077.pdf)
-- [Durandal Pinouts](https://holybro.com/collections/autopilot-flight-controllers/products/Durandal-Pinouts) (Holybro)
+- [Durandal Pinouts](https://cdn.shopifycdn.net/s/files/1/0604/5905/7341/files/Durandal_Pinouts_v1.0.pdf?v=1693983344) (Holybro)
diff --git a/docs/ko/flight_controller/holybro_pix32.md b/docs/ko/flight_controller/holybro_pix32.md
index 5a88bc050b..6760018783 100644
--- a/docs/ko/flight_controller/holybro_pix32.md
+++ b/docs/ko/flight_controller/holybro_pix32.md
@@ -13,7 +13,7 @@ It runs the PX4 flight stack on the [NuttX](https://nuttx.apache.org/) OS.

-As a CC-BY-SA 3.0 licensed Open Hardware design, schematics and design files should be [available here](https://github.com/PX4/Hardware).
+As a CC-BY-SA 3.0 licensed Open Hardware design, schematics and design files should be [available here](https://github.com/pixhawk/Hardware).
:::tip
The Holybro pix32 is software compatible with the [3DR Pixhawk 1](../flight_controller/pixhawk.md).
@@ -26,7 +26,7 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
## 주요 특징
-- Main System-on-Chip: [STM32F427](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU: FPU가있는 32 비트 STM32F427 코어 텍스® M4 코어
- RAM: 168 MHz/256 KB
- Flash: 2 MB
@@ -90,7 +90,7 @@ The board is based on the [Pixhawk project](https://pixhawk.org/) **FMUv2** open
- [FMUv2 + IOv2 schematic](https://raw.githubusercontent.com/PX4/Hardware/master/FMUv2/PX4FMUv2.4.5.pdf) -- Schematic and layout
:::info
-As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/PX4/Hardware).
+As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/pixhawk/Hardware).
:::
## 시리얼 포트 매핑
diff --git a/docs/ko/flight_controller/kakutef7.md b/docs/ko/flight_controller/kakutef7.md
index e65f2b4fbb..3aea837e6e 100644
--- a/docs/ko/flight_controller/kakutef7.md
+++ b/docs/ko/flight_controller/kakutef7.md
@@ -74,7 +74,7 @@ This is the silkscreen for the _Kakute F7_, showing the top of the board:
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [kakutef7_bl.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/kakutef7/kakutef7_bl_0b3fbe2da0.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [kakutef7_bl.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/kakutef7/kakutef7_bl_0b3fbe2da0.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 펌웨어 빌드
diff --git a/docs/ko/flight_controller/kakuteh7.md b/docs/ko/flight_controller/kakuteh7.md
index 7473e86711..8df0f06362 100644
--- a/docs/ko/flight_controller/kakuteh7.md
+++ b/docs/ko/flight_controller/kakuteh7.md
@@ -78,7 +78,7 @@ This is the silkscreen for the _Kakute H7_, showing the top of the board:
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [kakuteh7_bl.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/kakuteh7/holybro_kakuteh7_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [kakuteh7_bl.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/kakuteh7/holybro_kakuteh7_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 펌웨어 빌드
diff --git a/docs/ko/flight_controller/kakuteh7mini.md b/docs/ko/flight_controller/kakuteh7mini.md
index 9b4bacaf45..60f812c008 100644
--- a/docs/ko/flight_controller/kakuteh7mini.md
+++ b/docs/ko/flight_controller/kakuteh7mini.md
@@ -80,7 +80,7 @@ The board can be bought from one of the following shops (for example):
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before the PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [holybro_kakuteh7mini_bootloader.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/kakuteh7mini/holybro_kakuteh7mini_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [holybro_kakuteh7mini_bootloader.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/kakuteh7mini/holybro_kakuteh7mini_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 펌웨어 빌드
diff --git a/docs/ko/flight_controller/kakuteh7v2.md b/docs/ko/flight_controller/kakuteh7v2.md
index b227a6fb2b..d6fda590b4 100644
--- a/docs/ko/flight_controller/kakuteh7v2.md
+++ b/docs/ko/flight_controller/kakuteh7v2.md
@@ -77,7 +77,7 @@ The _Kakute H7v2_ is designed to work with the _Tekko32_ 4-in-1 ESC and they can
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before the PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [holybro_kakuteh7v2_bootloader.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/kakuteh7v2/holybro_kakuteh7v2_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [holybro_kakuteh7v2_bootloader.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/kakuteh7v2/holybro_kakuteh7v2_bootloader.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 펌웨어 빌드
diff --git a/docs/ko/flight_controller/mro_pixhawk.md b/docs/ko/flight_controller/mro_pixhawk.md
index 596c8a3af6..ecfc33c9d2 100644
--- a/docs/ko/flight_controller/mro_pixhawk.md
+++ b/docs/ko/flight_controller/mro_pixhawk.md
@@ -47,7 +47,6 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
- 외부 microUSB 포트
- 전원시스템
-
- 자동 복구 기능의 이상적인 다이오드 컨트롤러
- 서보 레일 고전력 (7V) 및 고전류 준비
- 모든 주변 장치 출력 과전류 보호, 모든 입력 ESD 보호
@@ -102,8 +101,8 @@ See [3DR Pixhawk 1 > Pinouts](../flight_controller/pixhawk.md#pinouts)
The board is based on the [Pixhawk-project](https://pixhawk.org/) **FMUv3** open hardware design.
-- [FMUv3 schematic](https://github.com/PX4/Hardware/raw/master/FMUv3_REV_D/Schematic%20Print/Schematic%20Prints.PDF) -- Schematic and layout
+- [FMUv3 schematic](https://github.com/pixhawk/Hardware/raw/master/FMUv3_REV_D/Schematic%20Print/Schematic%20Prints.PDF) -- Schematic and layout
:::info
-As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/PX4/Hardware).
+As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/pixhawk/Hardware).
:::
diff --git a/docs/ko/flight_controller/mro_x2.1.md b/docs/ko/flight_controller/mro_x2.1.md
index 57e1a9f109..aa601aebe5 100644
--- a/docs/ko/flight_controller/mro_x2.1.md
+++ b/docs/ko/flight_controller/mro_x2.1.md
@@ -1,4 +1,10 @@
-# mRo-X2.1 자동조종장치
+# mRo-X2.1 Autopilot (Discontinued)
+
+
+
+:::warning
+This flight controller has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
+:::
:::warning
PX4 does not manufacture this (or any) autopilot.
@@ -16,7 +22,7 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
## 요약
-- Main System-on-Chip: [STM32F427](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU : STM32F427VIT6 ARM® 마이크로 컨트롤러 - 개정판 3
- IO: STM32F100C8T6 ARM® 마이크로 컨트롤러
- 센서:
@@ -29,7 +35,9 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
- 장착 위치: 직경 30.5mm x 30.5mm 3.2mm
- 중량: 10.9g
-아래 다이어그램은 Pixhawk 1과 비교한 것입니다. mRo는 거의 동일한 하드웨어와 연결 기능을 제공하지만, 설치 공간이 훨씬 작습니다. 주요 차이점은 업데이트된 센서와 Rev 3 FMU입니다.
+아래 다이어그램은 Pixhawk 1과 비교한 것입니다.
+mRo는 거의 동일한 하드웨어와 연결 기능을 제공하지만, 설치 공간이 훨씬 작습니다.
+주요 차이점은 업데이트된 센서와 Rev 3 FMU입니다.

@@ -62,13 +70,13 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
기본적으로 mRo X2.1은 PX4가 아닌 ArduPilot® 용으로 미리 설정되어 제공될 수 있습니다. This
can be seen during firmware update when the board is recognized as FMUv2 instead of X2.1.
-In this case you must update the BootLoader using [BL_Update_X21.zip](https://github.com/PX4/PX4-user_guide/raw/main/assets/hardware/BL_Update_X21.zip).
+In this case you must update the BootLoader using [BL_Update_X21.zip](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/hardware/BL_Update_X21.zip).
이 캘리브레이션을 수행하지 않으면 나침반 방향이 잘못되어
보조 IMU는 감지되지 않을 수 있습니다.
업데이트 단계는 다음과 같습니다.
-1. Download and extract [BL_Update_X21.zip](https://github.com/PX4/PX4-user_guide/raw/main/assets/hardware/BL_Update_X21.zip).
+1. Download and extract [BL_Update_X21.zip](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/hardware/BL_Update_X21.zip).
2. Find the folder _BL_Update_X21_. This contains a **bin** file and a subfolder named **/etc** containing an **rc.txt** file
3. 이 파일을 마이크로 SD 카드의 루트 디렉토리에 복사하여 mRO x2.1에 삽입하십시오.
4. Mro x2.1의 전원을 켜십시오. 부팅시까지 기다렸다가 한 번 재부팅하십시오.
diff --git a/docs/ko/flight_controller/omnibus_f4_sd.md b/docs/ko/flight_controller/omnibus_f4_sd.md
index 9d7b253298..3878055d78 100644
--- a/docs/ko/flight_controller/omnibus_f4_sd.md
+++ b/docs/ko/flight_controller/omnibus_f4_sd.md
@@ -192,9 +192,9 @@ If you use CRSF Telemetry you will need to build custom PX4 firmware.
By contrast, FrSky telemetry can use prebuilt firmware.
:::
-For Omnibus we recommend the [TBS Crossfire Nano RX](http://team-blacksheep.com/products/prod:crossfire_nano_rx), since it is specifically designed for small Quads.
+For Omnibus we recommend the [TBS Crossfire Nano RX](https://www.team-blacksheep.com/products/prod:crossfire_nano_rx), since it is specifically designed for small Quads.
-On the handheld controller (e.g. Taranis) you will also need a [Transmitter Module](http://team-blacksheep.com/shop/cat:rc_transmitters#product_listing).
+On the handheld controller (e.g. Taranis) you will also need a [Transmitter Module](https://www.team-blacksheep.com/shop/cat:tbs-crossfire-radio-transmitter#product_listing).
이것은 RC 콘트롤러의 뒷면에 장착할 수 있습니다.
:::info
@@ -218,17 +218,13 @@ Instructions for this are provided in the [TBS Crossfire Manual](https://www.tea
You will need to build custom firmware to use CRSF.
For more information see [CRSF Telemetry](../telemetry/crsf_telemetry.md#px4-configuration).
-## 회로도
+
-The schematics are provided by [Airbot](https://myairbot.com/): [OmnibusF4-Pro-Sch.pdf](http://bit.ly/obf4pro).
-
-
-
-## 부트로더 업데이트
+## PX4 Bootloader Update {#bootloader}
The board comes pre-installed with [Betaflight](https://github.com/betaflight/betaflight/wiki).
Before PX4 firmware can be installed, the _PX4 bootloader_ must be flashed.
-Download the [omnibusf4sd_bl.hex](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/omnibus_f4_sd/omnibusf4sd_bl_d52b70cb39.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
+Download the [omnibusf4sd_bl.hex](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/omnibus_f4_sd/omnibusf4sd_bl_d52b70cb39.hex) bootloader binary and read [this page](../advanced_config/bootloader_update_from_betaflight.md) for flashing instructions.
## 펌웨어 빌드
diff --git a/docs/ko/flight_controller/pixfalcon.md b/docs/ko/flight_controller/pixfalcon.md
index 524e12806b..6e347df258 100644
--- a/docs/ko/flight_controller/pixfalcon.md
+++ b/docs/ko/flight_controller/pixfalcon.md
@@ -17,7 +17,7 @@ The Pixfalcon autopilot (designed by [Holybro®](https://holybro.c
## 요약
-- Main System-on-Chip: [STM32F427](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU : 단정밀도 FPU의 180MHz ARM® Cortexex® M4
- RAM : 256KB SRAM (L1)
- 페일세이프 시스템 온칩 : STM32F100
diff --git a/docs/ko/flight_controller/pixhack_v3.md b/docs/ko/flight_controller/pixhack_v3.md
index eb80cd65c0..8cb90a77df 100644
--- a/docs/ko/flight_controller/pixhack_v3.md
+++ b/docs/ko/flight_controller/pixhack_v3.md
@@ -1,4 +1,10 @@
-# Pixhack V3
+# CUAV Pixhack V3 (Discontinued)
+
+
+
+:::warning
+This flight controller has been [discontinued](../flight_controller/autopilot_experimental.md) and is no longer commercially available.
+:::
:::warning
PX4 does not manufacture this (or any) autopilot.
@@ -53,7 +59,6 @@ This flight controller is [manufacturer supported](../flight_controller/autopilo
보드는 아래에서 구입할 수 있습니다.
-- [store.cuav.net](http://store.cuav.net/index.php?id_product=8&id_product_attribute=0&rewrite=pixhack-v3-autopilot&controller=product&id_lang=3)
- [leixun.aliexpress.com/store](https://leixun.aliexpress.com/store)
## 펌웨어 빌드
@@ -65,13 +70,11 @@ It is pre-built and automatically installed by _QGroundControl_ when appropriate
To [build PX4](../dev_setup/building_px4.md) for this target:
-```
+```sh
make px4_fmu-v3_default
```
-## 핀배열과 회로도
-
-- [Documentation/wiring guides](http://doc.cuav.net/flight-controller/pixhack/en/pixhack-v3.html)
+
## 시리얼 포트 매핑
@@ -81,5 +84,5 @@ make px4_fmu-v3_default
| USART2 | /dev/ttyS1 | TELEM1 (흐름 제어) |
| USART3 | /dev/ttyS2 | TELEM2 (흐름 제어) |
| UART4 | | |
-| UART7 | 콘솔 | |
-| UART8 | SERIAL4 | |
+| UART7 | | 콘솔 |
+| UART8 | | SERIAL4 |
diff --git a/docs/ko/flight_controller/pixhawk-2.md b/docs/ko/flight_controller/pixhawk-2.md
index 085263683a..d08c6dbc4a 100644
--- a/docs/ko/flight_controller/pixhawk-2.md
+++ b/docs/ko/flight_controller/pixhawk-2.md
@@ -11,7 +11,7 @@ We recommend however to consider products built on industry standards, such as t
이 비행 컨트롤러는 표준을 따르지 않으며, 특허받은 커넥터를 사용합니다.
:::
-The [Hex Cube Black](http://www.proficnc.com/61-system-kits2) flight controller (previously known as Pixhawk 2.1) is a flexible autopilot intended primarily for manufacturers of commercial systems.
+The [Hex Cube Black](https://docs.cubepilot.org/user-guides/autopilot/the-cube) flight controller (previously known as Pixhawk 2.1) is a flexible autopilot intended primarily for manufacturers of commercial systems.
It is based on the [Pixhawk-project](https://pixhawk.org/) **FMUv3** open hardware design and runs PX4 on the [NuttX](https://nuttx.apache.org/) OS.

@@ -23,7 +23,7 @@ while a carrier board for a racer could includes ESCs form the frame of the vehi
Cube에는 2 개의 IMU에 진동 차단이 포함되어 있으며, 세 번째 고정 IMU는 참조 백업용으로 사용됩니다.
:::info
-The manufacturer [Cube Docs](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview) contain detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview#differences-between-cube-colours).
+The manufacturer [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube) contains detailed information, including an overview of the [Differences between Cube Colours](https://docs.cubepilot.org/user-guides/autopilot/the-cube/introduction/specifications).
:::
:::tip
@@ -32,7 +32,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
## 주요 특징
-- 32bit STM32F427 [Cortex-M4F](http://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4)® core with FPU
+- 32bit STM32F427 [Cortex-M4F](https://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4)® core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2MB 플래시 \(완전 액세스 가능\)
@@ -51,7 +51,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
## 구매처
-[Cube Black](http://www.proficnc.com/61-system-kits) (ProfiCNC)
+[Cube Black](https://www.cubepilot.com/#/reseller/list) (Reseller list)
## 조립
@@ -61,7 +61,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
### 프로세서
-- 32bit STM32F427 [Cortex M4](http://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4) core with FPU
+- 32bit STM32F427 [Cortex M4](https://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4) core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2MB 플래시 (완전 액세스 가능)
@@ -167,6 +167,5 @@ Cube Black의 CAN1과 CAN2의 실크 스크린이 뒤집힙니다 (CAN1은 CAN2
- [Cube Wiring Quickstart](../assembly/quick_start_cube.md)
- Cube 문서 (제조사) :
- - [Cube Module Overview](https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview)
- - [Cube User Manual](https://docs.cubepilot.org/user-guides/autopilot/the-cube-user-manual)
+ - [Cube User Guide](https://docs.cubepilot.org/user-guides/autopilot/the-cube)
- [Mini Carrier Board](https://docs.cubepilot.org/user-guides/carrier-boards/mini-carrier-board)
diff --git a/docs/ko/flight_controller/pixhawk.md b/docs/ko/flight_controller/pixhawk.md
index 277e277b03..19a6e3075e 100644
--- a/docs/ko/flight_controller/pixhawk.md
+++ b/docs/ko/flight_controller/pixhawk.md
@@ -19,7 +19,7 @@ Assembly/setup instructions for use with PX4 are provided here: [Pixhawk Wiring
## 주요 특징
-- Main System-on-Chip: [STM32F427](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU : 단정밀도 FPU의 180MHz ARM® Cortexex® M4
- RAM : 256KB SRAM (L1)
- 페일세이프 시스템 온칩 : STM32F100
@@ -61,7 +61,7 @@ mRo Pixhawk 주문:
### 프로세서
-- 32bit STM32F427 [Cortex-M4F](http://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4) core with FPU
+- 32bit STM32F427 [Cortex-M4F](https://en.wikipedia.org/wiki/ARM_Cortex-M#Cortex-M4) core with FPU
- 168 MHz
- 256 KB RAM
- 2 MB Flash
@@ -120,7 +120,7 @@ Pixhawk 는 3 개의 전원이 공급되는 경우에는 전원 공급 장치의
[FMUv2 + IOv2 schematic](https://raw.githubusercontent.com/PX4/Hardware/master/FMUv2/PX4FMUv2.4.5.pdf) -- Schematic and layout
:::info
-As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/PX4/Hardware).
+As a CC-BY-SA 3.0 licensed Open Hardware design, all schematics and design files are [available](https://github.com/pixhawk/Hardware).
:::
## 연결
@@ -264,22 +264,22 @@ The `RC IN` port is for RC receivers only and provides sufficient power for that
The [PX4 System Console](../debug/system_console.md) runs on the port labeled [SERIAL4/5](#serial-4-5-port).
:::tip
-A convenient way to connect to the console is to use a [Dronecode probe](https://kb.zubax.com/display/MAINKB/Dronecode+Probe+documentation), as it comes with connectors that can be used with several different Pixhawk devices.
-Simply connect the 6-pos DF13 1:1 cable on the [Dronecode probe](https://kb.zubax.com/display/MAINKB/Dronecode+Probe+documentation) to the Pixhawk `SERIAL4/5` port.
+A convenient way to connect to the console is to use a [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1), as it comes with connectors that can be used with several different Pixhawk devices.
+Simply connect the 6-pos DF13 1:1 cable on the [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1) to the Pixhawk `SERIAL4/5` port.
-
+
:::
The pinout is standard serial pinout, designed to connect to a [3.3V FTDI](https://www.digikey.com/en/products/detail/TTL-232R-3V3/768-1015-ND/1836393) cable (5V tolerant).
-| 3DR Pixhawk 1 | | FTDI | |
-| ------------- | -------------------------- | ---- | ------------------------------- |
-| 1 | +5V (적) | | N/C |
-| 2 | S4 Tx | | N/C |
-| 3 | S4 Rx | | N/C |
-| 4 | S5 Tx | 5 | FTDI RX (황) |
-| 5 | S5 Rx | 4 | FTDI TX (적황) |
-| 6 | GND | 1 | FTDI GND (흑) |
+\| 3DR Pixhawk 1 | | FTDI |
+\| ------------- | --------- | ---- | ---------------- |
+\| 1 | +5V (red) | | N/C |
+\| 2 | S4 Tx | | N/C |
+\| 3 | S4 Rx | | N/C |
+\| 4 | S5 Tx | 5 | FTDI RX (yellow) |
+\| 5 | S5 Rx | 4 | FTDI TX (orange) |
+\| 6 | GND | 1 | FTDI GND (black) |
6 핀 DF13 1 : 1 커넥터에 대한 FTDI 케이블의 배선은 아래 그림과 같습니다.
@@ -324,11 +324,11 @@ make px4_fmu-v2_default
## 부품 / 하우징
-- **ARM MINI JTAG (J6)**: 1.27 mm 10pos header (SHROUDED), for Black Magic Probe: FCI 20021521-00010D4LF ([Distrelec](https://www.distrelec.ch/en/minitek-127-straight-male-pcb-header-surface-mount-rows-10-contacts-27mm-pitch-amphenol-fci-20021521-00010d4lf/p/14352308), [Digi-Key](https://www.digikey.com/en/products/detail/20021521-00010T1LF/609-4054-ND/2414951),) or Samtec FTSH-105-01-F-DV-K (untested) or Harwin M50-3600542 ([Digikey](https://www.digikey.com/en/products/detail/harwin-inc/M50-3600542/2264370) or [Mouser](http://ch.mouser.com/ProductDetail/Harwin/M50-3600542/?qs=%2fha2pyFadujTt%2fIEz8xdzrYzHAVUnbxh8Ki%252bwWYPNeEa09PYvTkIOQ%3d%3d))
+- **ARM MINI JTAG (J6)**: 1.27 mm 10pos header (SHROUDED), for Black Magic Probe: FCI 20021521-00010D4LF ([Distrelec](https://www.distrelec.ch/en/minitek-127-straight-male-pcb-header-surface-mount-rows-10-contacts-27mm-pitch-amphenol-fci-20021521-00010d4lf/p/14352308), [Digi-Key](https://www.digikey.com/en/products/detail/20021521-00010T1LF/609-4054-ND/2414951),) or Samtec FTSH-105-01-F-DV-K (untested) or Harwin M50-3600542 ([Digikey](https://www.digikey.com/en/products/detail/harwin-inc/M50-3600542/2264370))
- JTAG Adapter Option #1: [BlackMagic Probe](https://1bitsquared.com/products/black-magic-probe). 케이블 없이 제공될 수 있습니다 (제조업체에 확인).
- If so, you will need the **Samtec FFSD-05-D-06.00-01-N** cable ([Samtec sample service](https://www.samtec.com/products/ffsd-05-d-06.00-01-n) or [Digi-Key Link: SAM8218-ND](http://www.digikey.com/product-search/en?x=0&y=0&lang=en&site=us&KeyWords=FFSD-05-D-06.00-01-N)) or [Tag Connect Ribbon](http://www.tag-connect.com/CORTEXRIBBON10) and a Mini-USB cable.
- - JTAG Adapter Option #2: [Digi-Key Link: ST-LINK/V2](https://www.digikey.com/product-detail/en/stmicroelectronics/ST-LINK-V2/497-10484-ND) / [ST USER MANUAL](http://www.st.com/internet/com/TECHNICAL_RESOURCES/TECHNICAL_LITERATURE/USER_MANUAL/DM00026748.pdf), needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
- - JTAG Adapter Option #3: [SparkFun Link: Olimex ARM-TINY](http://www.sparkfun.com/products/8278) or any other OpenOCD-compatible ARM Cortex JTAG adapter, needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
+ If so, you will need the **Samtec FFSD-05-D-06.00-01-N** cable ([Samtec sample service](https://www.samtec.com/products/ffsd-05-d-06.00-01-n) or [Digi-Key Link: SAM8218-ND](https://www.digikey.com/en/products/detail/samtec-inc/ffsd-05-d-06-00-01-n/1106577)) or [Tag Connect Ribbon](https://www.tag-connect.com/product/10-pin-cortex-ribbon-cable-4-length-with-50-mil-connectors) and a Mini-USB cable.
+ - JTAG Adapter Option #2: [Digi-Key Link: ST-LINK/V2](https://www.digikey.com/product-detail/en/stmicroelectronics/ST-LINK-V2/497-10484-ND) / [ST USER MANUAL](https://www.st.com/resource/en/user_manual/dm00026748.pdf), needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
+ - JTAG Adapter Option #3: [Olimex ARM-TINY](https://www.olimex.com/wiki/ARM-USB-TINY) or any other OpenOCD-compatible ARM Cortex JTAG adapter, needs an ARM Mini JTAG to 20pos adapter: [Digi-Key Link: 726-1193-ND](https://www.digikey.com/en/products/detail/texas-instruments/MDL-ADA2/1986451)
- **USARTs**: Hirose DF13 6 pos ([Digi-Key Link: DF13A-6P-1.25H(20)](https://www.digikey.com/products/en?keywords=H3371-ND))
- Mates: Hirose DF13 6 pos housing ([Digi-Key Link: Hirose DF13-6S-1.25C](https://www.digikey.com/products/en?keywords=H2182-ND))
- **I2C and CAN**: Hirose DF13 4 pos ([Digi-Key Link: DF13A-4P-1.25H(20)](https://www.digikey.com/en/products/detail/hirose-electric-co-ltd/DF13A-4P-1-25H-20/530666) - discontinued)
diff --git a/docs/ko/flight_controller/pixhawk4.md b/docs/ko/flight_controller/pixhawk4.md
index d9f25a2e86..4d7950a549 100644
--- a/docs/ko/flight_controller/pixhawk4.md
+++ b/docs/ko/flight_controller/pixhawk4.md
@@ -49,7 +49,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
- 기타 특성:
- 작동 온도: -40 ~ 85°c
-Additional information can be found in the [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf).
+Additional information can be found in the [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/blob/main/docs/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf).
## 구매처
@@ -157,7 +157,7 @@ The complete set of supported configurations can be seen in the [Airframes Refer
## 추가 정보
-- [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf)
+- [Pixhawk 4 Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4/pixhawk4_technical_data_sheet.pdf)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165).
- [Pixhawk 4 Wiring QuickStart](../assembly/quick_start_pixhawk4.md)
- [Pixhawk 4 Pinouts](https://cdn.shopify.com/s/files/1/0604/5905/7341/files/Pixhawk4-Pinouts.pdf) (Holybro)
diff --git a/docs/ko/flight_controller/pixhawk4_mini.md b/docs/ko/flight_controller/pixhawk4_mini.md
index 3f40759275..f2f1bf48a4 100644
--- a/docs/ko/flight_controller/pixhawk4_mini.md
+++ b/docs/ko/flight_controller/pixhawk4_mini.md
@@ -50,7 +50,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
- 기타 특성:
- 작동 온도: -40 ~ 85°c
-Additional information can be found in the [_Pixhawk 4 Mini_ Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_technical_data_sheet.pdf).
+Additional information can be found in the [_Pixhawk 4 Mini_ Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_technical_data_sheet.pdf).
## 구매처
@@ -66,7 +66,7 @@ The **RC IN** and **PPM** ports are for RC receivers only. 이 포트들에는
## 핀배열
-Download _Pixhawk 4 Mini_ pinouts from [here](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_pinouts.pdf).
+Download _Pixhawk 4 Mini_ pinouts from [here](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_pinouts.pdf).
## 크기
@@ -120,7 +120,8 @@ In order to access these ports, the user must remove the _Pixhawk 4 Mini_ casing

-The port has a standard serial pinout and can be connected to a standard FTDI cable (3.3V, but it's 5V tolerant) or a [Dronecode probe](https://kb.zubax.com/display/MAINKB/Dronecode+Probe+documentation). The pinout uses the standard [Pixhawk debug connector](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf) pinout. Please refer to the [wiring](../debug/system_console.md) page for details of how to wire up this port.
+The port has a standard serial pinout and can be connected to a standard FTDI cable (3.3V, but it's 5V tolerant) or a [Zubax BugFace BF1](https://github.com/Zubax/bugface_bf1).
+The pinout uses the standard [Pixhawk debug connector](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf) pinout. Please refer to the [wiring](../debug/system_console.md) page for details of how to wire up this port.
## 시리얼 포트 매핑
@@ -153,5 +154,5 @@ _Pixhawk 4 Mini_ does not have AUX ports.
## 추가 정보
-- [_Pixhawk 4 Mini_ Technical Data Sheet](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_technical_data_sheet.pdf)
+- [_Pixhawk 4 Mini_ Technical Data Sheet](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_technical_data_sheet.pdf)
- [FMUv5 reference design pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165).
diff --git a/docs/ko/flight_controller/pixhawk6c_mini.md b/docs/ko/flight_controller/pixhawk6c_mini.md
index 3da3c7ef0e..fc76068bc5 100644
--- a/docs/ko/flight_controller/pixhawk6c_mini.md
+++ b/docs/ko/flight_controller/pixhawk6c_mini.md
@@ -119,7 +119,7 @@ Please refer to the [Pixhawk 4 Mini Wiring Quick Start](../assembly/quick_start_
| UART7 | /dev/ttyS5 | TELEM1 | TELEM1 |
| UART8 | /dev/ttyS6 | GPS2 | GPS2 |
-
+
## 크기
diff --git a/docs/ko/flight_controller/pixhawk_mini.md b/docs/ko/flight_controller/pixhawk_mini.md
index 7aee5cf0e7..99a74fde7d 100644
--- a/docs/ko/flight_controller/pixhawk_mini.md
+++ b/docs/ko/flight_controller/pixhawk_mini.md
@@ -266,7 +266,7 @@ Pixhawk 미니는 다양한 무선 수신기 모델을 지원합니다.
 -- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/ko/flight_controller/pixhawk_series.md b/docs/ko/flight_controller/pixhawk_series.md
index d42777e771..979404a53a 100644
--- a/docs/ko/flight_controller/pixhawk_series.md
+++ b/docs/ko/flight_controller/pixhawk_series.md
@@ -41,7 +41,7 @@ The [Pixhawk project](https://pixhawk.org/) creates open hardware designs in the
Manufacturers are encouraged to take the [open designs](https://github.com/pixhawk/Hardware) and create products that are best suited to a particular market or use case (the physical layout/form factor not part of the open specification). 동일한 디자인의 보드는 바이너리 수준에서 호환이 가능합니다.
:::info
-While a physical connector standard is not mandated, newer products generally follow the [Pixhawk Connector Standard](https://pixhawk.org/pixhawk-connector-standard/).
+While a physical connector standard is not mandated, newer products generally follow the [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf).
:::
The project also creates reference autopilot boards based on the open designs, and shares them under the same [licence](#licensing-and-trademarks).
diff --git a/docs/ko/flight_controller/pixracer.md b/docs/ko/flight_controller/pixracer.md
index 84c9fe9a6a..ade809f2df 100644
--- a/docs/ko/flight_controller/pixracer.md
+++ b/docs/ko/flight_controller/pixracer.md
@@ -16,7 +16,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
## 주요 특징
-- Main System-on-Chip: [STM32F427VIT6 rev.3](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427VIT6 rev.3](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU : 단정밀도 FPU의 180MHz ARM Cortexex® M4
- RAM : 256KB SRAM (L1)
- 표준 FPV 폼 팩터 : 36x36mm, 표준 30.5mm 구멍 패턴
@@ -41,7 +41,8 @@ Pixracer is available from the [mRobotics.io](https://store.mrobotics.io/mRo-Pix
## 키트
-Pixracer는 별도의 항공전자기기 전원공급장치를 사용하도록 설계되었습니다. 이는 모터 또는 ESC의 전류 서지가 비행 컨트롤러로 다시 흐르고 섬세한 센서를 방해하는 것을 방지하는 데 필요합니다.
+Pixracer는 별도의 항공전자기기 전원공급장치를 사용하도록 설계되었습니다.
+이는 모터 또는 ESC의 전류 서지가 비행 컨트롤러로 다시 흐르고 섬세한 센서를 방해하는 것을 방지하는 데 필요합니다.
- 전원 모듈(전압 및 전류 감지 포함)
- I2C 스플리터(AUAV, Hobbyking 및 3DR® 주변 장치 지원)
@@ -53,7 +54,7 @@ Pixracer는 별도의 항공전자기기 전원공급장치를 사용하도록
이를 통해 데스크탑 시스템이 필요없습니다.
- [ESP8266 Wifi](../telemetry/esp8266_wifi_module.md)
-- [Custom ESP8266 MAVLink firmware](https://github.com/dogmaphobic/mavesp8266)
+- [Custom ESP8266 MAVLink firmware](https://github.com/BeyondRobotix/mavesp8266)
:::info
Firmware upgrade is not yet enabled over WiFi (it is supported by the default bootloader but not yet enabled).
@@ -85,7 +86,7 @@ For more information see: [Pixracer Wiring Quickstart > External Telemetry](../a
## 커넥터
-All connectors follow the [Pixhawk connector standard](https://pixhawk.org/pixhawk-connector-standard/).
+All connectors follow the [Pixhawk connector standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf).
Unless noted otherwise all connectors are JST GH.
## 핀배열
@@ -204,8 +205,8 @@ The reference is provided as: [Altium Design Files](https://github.com/AUAV-Open
The following PDF files are provided for _convenience only_:
-- [pixracer-rc12-12-06-2015-1330.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixracer/pixracer-rc12-12-06-2015-1330.pdf)
-- [pixracer-r14.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixracer/pixracer-r14.pdf) - R14 or RC14 is printed next to the SDCard socket
+- [pixracer-rc12-12-06-2015-1330.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixracer/pixracer-rc12-12-06-2015-1330.pdf)
+- [pixracer-r14.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixracer/pixracer-r14.pdf) - R14 or RC14 is printed next to the SDCard socket
## 펌웨어 빌드
diff --git a/docs/ko/flight_controller/raccoonlab_fmu6x.md b/docs/ko/flight_controller/raccoonlab_fmu6x.md
index 2ac7e1a86c..a692b0d83f 100644
--- a/docs/ko/flight_controller/raccoonlab_fmu6x.md
+++ b/docs/ko/flight_controller/raccoonlab_fmu6x.md
@@ -159,4 +159,4 @@ The complete set of supported configurations can be seen in the [Airframes Refer
- [Pixhawk Autopilot FMUv6X Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-012%20Pixhawk%20Autopilot%20v6X%20Standard.pdf)
- [Pixhawk Autopilot Bus Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-010%20Pixhawk%20Autopilot%20Bus%20Standard.pdf)
- [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf)
-- [RaccoonLab docs](http://docs.raccoonlab.co)
+- [RaccoonLab docs](https://docs.raccoonlab.co/)
diff --git a/docs/ko/flight_controller/thepeach_k1.md b/docs/ko/flight_controller/thepeach_k1.md
index 9f83e75a61..75ba377045 100644
--- a/docs/ko/flight_controller/thepeach_k1.md
+++ b/docs/ko/flight_controller/thepeach_k1.md
@@ -14,21 +14,17 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
## 사양
- Main 프로세서: STM32F427VIT6
-
- 32bit ARM Cortex-M4, 168 MHz 256 KB RAM 2 MB Flash memory
- IO 프로세서: STM32F100C8T6
-
- ARM Cortex-M3, 32bit ARM Cortex-M3, 24 MHz, 8KB SRAM
- 내장 센서 :
-
- 가속도/자이로: ICM-20602
- 가속도/자이로스코프/지자기: MPU-9250
- 기압계: MS5611
- 인터페이스
-
- 8+5개의 PWM 출력 (IO 8개, FMU 5개)
- Spektrum DSM / DSM2 / DSM-X Satellite 입력 호환
- Futaba S.BUS 입출력 호환
@@ -98,4 +94,4 @@ make thepeach_k1_default
## 구매처
-Order from [ThePeach](http://thepeach.shop/)
+Order from [ThePeach](https://thepeach.shop/)
diff --git a/docs/ko/flight_controller/thepeach_r1.md b/docs/ko/flight_controller/thepeach_r1.md
index 5fe45fed31..a07044eeaa 100644
--- a/docs/ko/flight_controller/thepeach_r1.md
+++ b/docs/ko/flight_controller/thepeach_r1.md
@@ -14,21 +14,17 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
## 사양
- Main 프로세서: STM32F427VIT6
-
- 32bit ARM Cortex-M4, 168 MHz 256 KB RAM 2 MB Flash memory
- IO 프로세서: STM32F100C8T6
-
- ARM Cortex-M3, 32bit ARM Cortex-M3, 24 MHz, 8KB SRAM
- 내장 센서 :
-
- 가속도/자이로: ICM-20602
- 가속도/자이로스코프/지자기: MPU-9250
- 기압계: MS5611
- 인터페이스
-
- 8+6개의 PWM 출력 (IO 8개, FMU 6개)
- Spektrum DSM / DSM2 / DSM-X Satellite 입력 호환
- Futaba S.BUS 입출력 호환
@@ -42,7 +38,6 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
- 배터리 하나의 전압 / 전류에 대한 아날로그 입력
- 라즈베리파이 CM3+의 인터페이스
-
- VBUS
- DDR2 커넥터: 라즈베리파이 CM3+
- UART 포트 1개
@@ -103,4 +98,4 @@ make thepeach_r1_default
## 구매처
-Order from [ThePeach](http://thepeach.shop/)
+Order from [ThePeach](https://thepeach.shop/)
diff --git a/docs/ko/flight_modes/offboard.md b/docs/ko/flight_modes/offboard.md
index eee2936229..da73ed20ea 100644
--- a/docs/ko/flight_modes/offboard.md
+++ b/docs/ko/flight_modes/offboard.md
@@ -85,9 +85,7 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### 콥터
- [px4_msgs::msg::TrajectorySetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/TrajectorySetpoint.msg)
-
- 다음 입력 조합이 지원됩니다.
-
- Position setpoint (`position` different from `NaN`). Non-`NaN` values of velocity and acceleration are used as feedforward terms for the inner loop controllers.
- Velocity setpoint (`velocity` different from `NaN` and `position` set to `NaN`). Non-`NaN` values acceleration are used as feedforward terms for the inner loop controllers.
- Acceleration setpoint (`acceleration` different from `NaN` and `position` and `velocity` set to `NaN`)
@@ -95,18 +93,14 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- All values are interpreted in NED (Nord, East, Down) coordinate system and the units are \[m\], \[m/s\] and \[m/s^2\] for position, velocity and acceleration, respectively.
- [px4_msgs::msg::VehicleAttitudeSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleAttitudeSetpoint.msg)
-
- The following input combination is supported:
-
- quaternion `q_d` + thrust setpoint `thrust_body`.
Non-`NaN` values of `yaw_sp_move_rate` are used as feedforward terms expressed in Earth frame and in \[rad/s\].
- The quaternion represents the rotation between the drone body FRD (front, right, down) frame and the NED frame. The thrust is in the drone body FRD frame and expressed in normalized \[-1, 1\] values.
- [px4_msgs::msg::VehicleRatesSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleRatesSetpoint.msg)
-
- The following input combination is supported:
-
- `roll`, `pitch`, `yaw` and `thrust_body`.
- All the values are in the drone body FRD frame. The rates are in \[rad/s\] while thrust_body is normalized in \[-1, 1\].
@@ -116,7 +110,6 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
The following offboard control modes bypass all internal PX4 control loops and should be used with great care.
- [px4_msgs::msg::VehicleThrustSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleThrustSetpoint.msg) + [px4_msgs::msg::VehicleTorqueSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleTorqueSetpoint.msg)
-
- The following input combination is supported:
- `xyz` for thrust and `xyz` for torque.
- All the values are in the drone body FRD frame and normalized in \[-1, 1\].
@@ -134,9 +127,7 @@ The following MAVLink messages and their particular fields and field values are
### 멀티콥터/VTOL
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported:
-
- Position setpoint (only `x`, `y`, `z`)
- Velocity setpoint (only `vx`, `vy`, `vz`)
- Acceleration setpoint (only `afx`, `afy`, `afz`)
@@ -146,9 +137,7 @@ The following MAVLink messages and their particular fields and field values are
- PX4 supports the following `coordinate_frame` values (only): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported:
-
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
- Velocity setpoint (only `vx`, `vy`, `vz`)
@@ -172,11 +161,8 @@ The following MAVLink messages and their particular fields and field values are
### Fixed-wing
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported (via `type_mask`):
-
- Position setpoint (`x`, `y`, `z` only; velocity and acceleration setpoints are ignored).
-
- Specify the _type_ of the setpoint in `type_mask` (if these bits are not set the vehicle will fly in a flower-like pattern):
::: info
Some of the _setpoint type_ values below are not part of the MAVLink standard for the `type_mask` field.
@@ -196,11 +182,8 @@ The following MAVLink messages and their particular fields and field values are
- PX4 supports the coordinate frames (`coordinate_frame` field): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported (via `type_mask`):
-
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
-
- Specify the _type_ of the setpoint in `type_mask` (if these bits are not set the vehicle will fly in a flower-like pattern):
::: info
@@ -225,11 +208,8 @@ The following MAVLink messages and their particular fields and field values are
### 탐사선
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported (in `type_mask`):
-
- Position setpoint (only `x`, `y`, `z`)
-
- Specify the _type_ of the setpoint in `type_mask`:
::: info
@@ -245,13 +225,11 @@ The following MAVLink messages and their particular fields and field values are
- PX4 supports the coordinate frames (`coordinate_frame` field): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported (in `type_mask`):
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
- Specify the _type_ of the setpoint in `type_mask` (not part of the MAVLink standard).
값들은 다음과 같습니다:
-
- 다음 비트가 설정되지 않으면 정상적인 동작입니다.
- -12288 : Loiter 설정점 (설정점에 매우 가까워지면 기체는 멈춤).
@@ -279,7 +257,7 @@ _Offboard mode_ is affected by the following parameters:
## 개발자 리소스
-Typically developers do not directly work at the MAVLink layer, but instead use a robotics API like [MAVSDK](https://mavsdk.mavlink.io/) or [ROS](http://www.ros.org/) (these provide a developer friendly API, and take care of managing and maintaining connections, sending messages and monitoring responses - the minutiae of working with _Offboard mode_ and MAVLink).
+Typically developers do not directly work at the MAVLink layer, but instead use a robotics API like [MAVSDK](https://mavsdk.mavlink.io/) or [ROS](https://www.ros.org/) (these provide a developer friendly API, and take care of managing and maintaining connections, sending messages and monitoring responses - the minutiae of working with _Offboard mode_ and MAVLink).
The following resources may be useful for a developer audience:
diff --git a/docs/ko/frames_multicopter/dji_f450_cuav_5nano.md b/docs/ko/frames_multicopter/dji_f450_cuav_5nano.md
index eb7984f1db..e147ecb4a8 100644
--- a/docs/ko/frames_multicopter/dji_f450_cuav_5nano.md
+++ b/docs/ko/frames_multicopter/dji_f450_cuav_5nano.md
@@ -43,8 +43,8 @@ FrSky Taranis 조종기를 사용할 수 있습니다.
| DJI F450 밑판 | 1 |
| DJI F450 윗판 | 1 |
| DJI F450 랜딩기어 역할을 하는 다리 | 4 |
-| M3\*8 나사 | 18 |
-| M2 5\*6 나사 | 24 |
+| M3\*8 screws | 18 |
+| M2 5\*6 screws | 24 |
| 벨크로 배터리 스트랩 | 1 |
| DJI Phantom 나사 내장 업그레이드 프로펠러 9.4x5 | 1 |
@@ -163,7 +163,7 @@ FrSky Taranis 조종기를 사용할 수 있습니다.
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/ko/frames_multicopter/dji_f450_cuav_5plus.md b/docs/ko/frames_multicopter/dji_f450_cuav_5plus.md
index e6fe039046..64ed53be20 100644
--- a/docs/ko/frames_multicopter/dji_f450_cuav_5plus.md
+++ b/docs/ko/frames_multicopter/dji_f450_cuav_5plus.md
@@ -43,8 +43,8 @@ FrSky Taranis 조종기를 사용할 수 있습니다.
| DJI F450 밑판 | 1 |
| DJI F450 윗판 | 1 |
| DJI F450 랜딩기어 역할을 하는 다리 | 4 |
-| M3\*8 나사 | 18 |
-| M2 5\*6 나사 | 24 |
+| M3\*8 screws | 18 |
+| M2 5\*6 screws | 24 |
| 벨크로 배터리 스트랩 | 1 |
| DJI Phantom 나사 내장 업그레이드 프로펠러 9.4x5 | 1 |
@@ -166,7 +166,7 @@ FrSky Taranis 조종기를 사용할 수 있습니다.
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/)
+[Download and install](https://qgroundcontrol.com/downloads/)
_QGroundControl_ for your platform.
:::tip
diff --git a/docs/ko/frames_multicopter/holybro_qav250_pixhawk4_mini.md b/docs/ko/frames_multicopter/holybro_qav250_pixhawk4_mini.md
index 7dcd32236e..09c35d2fdf 100644
--- a/docs/ko/frames_multicopter/holybro_qav250_pixhawk4_mini.md
+++ b/docs/ko/frames_multicopter/holybro_qav250_pixhawk4_mini.md
@@ -21,7 +21,7 @@ This topic provides full instructions for building the kit and configuring PX4 u
## 퀵 스타트 가이드
-[Pixhawk 4 Mini QAV250 Kit Quickstart Guide](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_qav250kit_quickstart_web.pdf)
+[Pixhawk 4 Mini QAV250 Kit Quickstart Guide](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_qav250kit_quickstart_web.pdf)
## 부품 명세서
@@ -40,7 +40,7 @@ The Holybro [QAV250 Kit](https://holybro.com/products/qav250-kit) kits includes
이 조립 예제에서는 다음의 부품들을 사용합니다.
- Receiver: [FrSSKY D4R-II](https://www.frsky-rc.com/product/d4r-ii/)
-- Battery: [4S 1300 mAh](http://www.getfpv.com/lumenier-1300mah-4s-60c-lipo-battery-xt60.html)
+- Battery: [4S 1300 mAh](https://www.getfpv.com/lumenier-1300mah-4s-60c-lipo-battery-xt60.html)
## 하드웨어
@@ -104,26 +104,37 @@ Estimated time to assemble frame is 2 hours and 1.5 hours installing the autopil
1. 그림과 같이 15mm 나사를 사용하여 암을 버튼 플레이트에 부착합니다.

+
2. 짧은 판을 팔 위에 올려 놓습니다.

+
3. 15mm 나사에 너트를 끼웁니다 (다음 단계 참조).
+
4. Insert the plastic screws into the indicated holes (note that this part of the frame faces down when the vehicle is complete).

+
5. Add the plastic nuts to the screws (turn over, as shown)

+
6. Lower the power module over the plastic screws and then add the plastics standoffs

+
7. Put the flight controller plate on the standoffs (over the power module)

+
8. 모터를 부착합니다. 모터에는 회전 방향을 나타내는 화살표가 있습니다.

+
9. Use double sided tape from kit to attach the _Pixhawk 4 Mini_ to the flight controller plate.

+
10. Connect the power module's "power" cable to _Pixhawk 4 mini_.

+
11. Attach the aluminium standoffs to the button plate

+
12. Esc를 모터에 연결합니다. 이 이미지는 모터의 순서와 회전 방향을 나타냅니다.

@@ -136,19 +147,24 @@ Estimated time to assemble frame is 2 hours and 1.5 hours installing the autopil
:::

+
13. 신호 ESC 케이블을 Pixhawk의 PWM 출력에 올바른 순서로 연결합니다 (이전 이미지 참조).

+
14. 수신기 연결합니다.
- PPM 수신기를 사용하는 경우 PPM 포트에 연결하십시오.

+
- SBUS 수신기를 사용하는 경우 RC IN 포트에 연결합니다.

+
15. 텔레메트리 모듈을 연결합니다. 이중 테이프로 모듈을 붙여넣고 텔레메트리 포트에 연결합니다.

+
16. GPS 모듈 연결

@@ -156,6 +172,7 @@ Estimated time to assemble frame is 2 hours and 1.5 hours installing the autopil
제공된 3M 테이프 또는 페이스트를 사용하여 상단 플레이트에 모듈을 부착합니다. 그런 다음 그림과 같이 스탠드오프에 상단 플레이트를 놓습니다.

+
17. 마지막 "필수"조립 단계는 배터리를 고정하기 위해 벨크로를 추가하는 것입니다.

@@ -194,7 +211,7 @@ If you have to wire the system yourself, the diagram below shows all the connect
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the QAV250 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/ko/frames_multicopter/holybro_s500_v2_pixhawk4.md b/docs/ko/frames_multicopter/holybro_s500_v2_pixhawk4.md
index 9e2bafd664..680e9f02d5 100644
--- a/docs/ko/frames_multicopter/holybro_s500_v2_pixhawk4.md
+++ b/docs/ko/frames_multicopter/holybro_s500_v2_pixhawk4.md
@@ -45,8 +45,8 @@ FrSky Taranis 무선 조종기를 사용하여 조립하는 경우를 예시로
| 축거 : 480mm | 1 |
| 암 | 4 |
| 착륙 기어 세트 | 2 |
-| M3\*8 나사 | 18 |
-| M2 5\*6 나사 | 24 |
+| M3\*8 screws | 18 |
+| M2 5\*6 screws | 24 |
| 배터리 혁지 | 1 |
| 프로펠러 1045 (V2 업데이트) | 1 |
@@ -73,8 +73,8 @@ FrSky Taranis 무선 조종기를 사용하여 조립하는 경우를 예시로
| USB 케이블 | 1 |
| 'X'타입 접이식 받침대 마운트 | 1 |
| 70mm & 140mm carbon rod standoff | 2 |
-| 6\*3 2.54mm 피치 수평 핀 | 1 |
-| 8\*3 2.54mm 피치 수평 핀 | 2 |
+| 6\*3 2.54mm pitch Horizontal Pin | 1 |
+| 8\*3 2.54mm pitch Horizontal Pin | 2 |
| 폼 세트 | 1 |
| Pixhawk 4 빠른 시작 가이드 | 1 |
| Pixhawk4 핀아웃 | 1 |
@@ -268,7 +268,7 @@ M3X8 나사 (총 8개, 각 측면에 4개)로 연결합니다.
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the QAV250 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/ko/frames_multicopter/holybro_x500V2_pixhawk5x.md b/docs/ko/frames_multicopter/holybro_x500V2_pixhawk5x.md
index f271b2a7a9..93bc0114f2 100644
--- a/docs/ko/frames_multicopter/holybro_x500V2_pixhawk5x.md
+++ b/docs/ko/frames_multicopter/holybro_x500V2_pixhawk5x.md
@@ -196,7 +196,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/ko/frames_multicopter/holybro_x500_pixhawk4.md b/docs/ko/frames_multicopter/holybro_x500_pixhawk4.md
index 038901f2d9..31247eafa5 100644
--- a/docs/ko/frames_multicopter/holybro_x500_pixhawk4.md
+++ b/docs/ko/frames_multicopter/holybro_x500_pixhawk4.md
@@ -215,7 +215,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/ko/frames_multicopter/holybro_x500v2_pixhawk6c.md b/docs/ko/frames_multicopter/holybro_x500v2_pixhawk6c.md
index 494237b17c..3331f53b37 100644
--- a/docs/ko/frames_multicopter/holybro_x500v2_pixhawk6c.md
+++ b/docs/ko/frames_multicopter/holybro_x500v2_pixhawk6c.md
@@ -15,7 +15,7 @@ This topic provides full instructions for building the [Holybro X500 V2 ARF Kit]
### Payload and Battery Holder
-**Screw**- Sunk Screw M2.5\*6 12pcs
+**Screw**- Sunk Screw M2.5\*6 12pcs
1. Insert the hanger rubber ring gasket in each of their respective hangers.
Do not use sharp objects to press the rubbers inside.
@@ -135,6 +135,7 @@ The following parts can be placed as per usual.
[](https://youtu.be/aiFxVJFjlos)
This guide uses the GPS mount location suggested in Holybro’s guide.
+
2. Screw the GPS mount’s bottom end on the payload holder side using Locknut M3 & Screw M3\*10
[](https://youtu.be/uG5UKy3FrIc)
@@ -170,7 +171,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/ko/frames_multicopter/omnicopter.md b/docs/ko/frames_multicopter/omnicopter.md
index e39a0c22ef..1ff5bb0b35 100644
--- a/docs/ko/frames_multicopter/omnicopter.md
+++ b/docs/ko/frames_multicopter/omnicopter.md
@@ -41,7 +41,7 @@ This build follows the original design from [Brescianini, Dario, and Raffaello D
- rods: 12x328mm, 6x465mm
- Screws:
- Motors and standoffs: 40x M3x12mm
- - FC mount: 4x M3x35mm, 4x M3 nuts
+ - FC mount: 4x M3x35mm, 4x M3 nuts
- Standoffs: 4x 40mm
- [3D model](https://cad.onshape.com/documents/eaff30985f1298dc6ce8ce13/w/2f662e604240c4082682e5e3/e/ad2b2245b73393cf369132f7)
@@ -57,10 +57,13 @@ This build follows the original design from [Brescianini, Dario, and Raffaello D
You will notice if it's wrong when the angles of the rods are not correct.
:::
+
- Cut the rods
+
- Test that it all works by connecting the frame pieces together:

+
- Place the motors as far out as possible, without the propellers touching the rods.
### 전자부품
@@ -117,7 +120,7 @@ Make sure the motors do not overheat with the changed settings.
- Parameters:
- Change the desaturation logic for better attitude tracking: set [CA_METHOD](../advanced_config/parameter_reference.md#CA_METHOD) to 0.
- Disable failure detection: set [FD_FAIL_P](../advanced_config/parameter_reference.md#FD_FAIL_P) and [FD_FAIL_R](../advanced_config/parameter_reference.md#FD_FAIL_R) to 0.
-- [This file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/multicopter/omnicopter/omnicopter.params) contains all the relevant parameters.
+- [This file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/multicopter/omnicopter/omnicopter.params) contains all the relevant parameters.
## 비디오
diff --git a/docs/ko/frames_multicopter/qav_r_5_kiss_esc_racer.md b/docs/ko/frames_multicopter/qav_r_5_kiss_esc_racer.md
index 5f7618cefa..4d6015c546 100644
--- a/docs/ko/frames_multicopter/qav_r_5_kiss_esc_racer.md
+++ b/docs/ko/frames_multicopter/qav_r_5_kiss_esc_racer.md
@@ -6,7 +6,7 @@ This topic provides full build and configuration instructions for using the fram
주요 정보:
-- **Frame:** [Lumenier QAV-R 5"](http://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
+- **Frame:** [Lumenier QAV-R 5"](https://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
- **Flight controller:** [Pixracer](../flight_controller/pixracer.md)
@@ -18,24 +18,24 @@ This topic provides full build and configuration instructions for using the fram
### 기체(비행에 필요)
-- Autopilot: [Pixracer](../flight_controller/pixracer.md) from [AUAV](https://store.mrobotics.io/mRo-PixRacer-R14-Official-p/auav-pxrcr-r14-mr.htm) including ESP8266 WiFi- and [ACSP5](https://store.mrobotics.io/product-p/auav-acsp5-mr.htm) power-module
-- Frame: [Lumenier QAV-R 5"](http://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
-- Motors: [Lumenier RX2206-11 2350KV](http://www.getfpv.com/lumenier-rx2206-11-2350kv-motor.html)
-- ESCs: [KISS 24A Race Edition](http://www.getfpv.com/kiss-24a-esc-race-edition-32bit-brushless-motor-ctrl.html)
-- Props: HQProp 5x4.5x3 [CW](http://www.getfpv.com/hqprop-5x4-5x3rg-cw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html) [CCW](http://www.getfpv.com/hqprop-5x4-5x3g-ccw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html)
+- Autopilot: [Pixracer](../flight_controller/pixracer.md) from [AUAV](https://store.mrobotics.io/mRo-PixRacer-R14-Official-p/auav-pxrcr-r14-mr.htm) including ESP8266 WiFi- and [ACSP5](https://store.mrobotics.io/product-p/auav-acsp5-mr.htm) power-module
+- Frame: [Lumenier QAV-R 5"](https://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
+- Motors: [Lumenier RX2206-11 2350KV](https://www.getfpv.com/lumenier-rx2206-11-2350kv-motor.html)
+- ESCs: [KISS 24A Race Edition](https://www.getfpv.com/kiss-24a-esc-race-edition-32bit-brushless-motor-ctrl.html)
+- Props: HQProp 5x4.5x3 [CW](https://www.getfpv.com/hqprop-5x4-5x3rg-cw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html) [CCW](https://www.getfpv.com/hqprop-5x4-5x3g-ccw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html)
- GPS / (외장) Mag.: M8N taken from a [Pixhawk Mini (Discontinued)](../flight_controller/pixhawk_mini.md) set and rewired
-- Battery: [TATTU 1800mAh 4s 75c Lipo](http://www.getfpv.com/tattu-1800mah-4s-75c-lipo-battery.html)
-- RC Receiver: [FrSky X4R-SB](http://www.getfpv.com/frsky-x4r-sb-3-16-channel-receiver-w-sbus.html)
-- RC Transmitter: [FrSky Taranis](http://www.getfpv.com/frsky-taranis-x9d-plus-2-4ghz-accst-radio-w-soft-case-mode-2.html)
-- FC dampening: [O-Rings](http://www.getfpv.com/multipurpose-o-ring-set-of-8.html)
-- GPS Mount: [GPS mast](http://www.getfpv.com/folding-aluminum-gps-mast-for-dji.html)
+- Battery: [TATTU 1800mAh 4s 75c Lipo](https://www.getfpv.com/tattu-1800mah-4s-75c-lipo-battery.html)
+- RC Receiver: [FrSky X4R-SB](https://www.getfpv.com/frsky-x4r-sb-3-16-channel-receiver-w-sbus.html)
+- RC Transmitter: [FrSky Taranis](https://www.getfpv.com/frsky-taranis-x9d-plus-2-4ghz-accst-radio-w-soft-case-mode-2.html)
+- FC dampening: [O-Rings](https://www.getfpv.com/multipurpose-o-ring-set-of-8.html)
+- GPS Mount: [GPS mast](https://www.getfpv.com/folding-aluminum-gps-mast-for-dji.html)
### FPV(선택 사항)
- Camera: [RunCam Swift RR Edition](https://www.getfpv.com/runcam-swift-rotor-riot-special-edition-ir-block-black.html) **includes must-have high quality wide angle lens from GoPro!**
- Video Tx: [ImmersionRC Tramp HV 5.8GHz 600mW](https://www.getfpv.com/immersionrc-tramp-hv-5-8ghz-video-tx-us-version.html) (Discontinued).
-- Video Antennas: [TBS Triumph 5.8GHz CP](http://www.getfpv.com/fpv/antennas/tbs-triumph-5-8ghz-cp-fpv-antenna-3275.html) (SMA port fits ImmercionRC Tx)
-- FPV voltage source plug: [Male JST Battery Pigtail](http://www.getfpv.com/male-jst-battery-pigtail-10cm-10pcs-bag.html)
+- Video Antennas: [TBS Triumph 5.8GHz CP](https://www.getfpv.com/fpv/antennas/tbs-triumph-5-8ghz-cp-fpv-antenna-3275.html) (SMA port fits ImmercionRC Tx)
+- FPV voltage source plug: [Male JST Battery Pigtail](https://www.getfpv.com/male-jst-battery-pigtail-10cm-10pcs-bag.html)
:::info
These parts cover the sending side for standard FPV 5.8GHz analog FM video. 라이브 비디오 스트림을 사용하려면 호환 수신기 및 디스플레이가 필요합니다.
@@ -204,7 +204,7 @@ Sadly the pin assignment was completely wrong and I rewired the connector again
여기에 설명 된 FPV 전송은 비행 컨트롤러와 전자적으로 독립적으로 작동하며, 전원 모듈과 같이 배터리 전압만을 사용합니다.
먼저 모든 것이 올바르게 작동하는지 확인하기 위해 벤치 테스트를 수행하였습니다.
-송신기와 함께 제공되는 비디오 신호 케이블을 FPV 카메라 뒷면과 송신기의 일치하는 플러그에 연결하십시오. 나사를 조인 다음 JST 전원 플러그를 초안 차량이나 다른 전압 소스에 연결하십시오.
+송신기와 함께 제공되는 비디오 신호 케이블을 FPV 카메라 뒷면과 송신기의 일치하는 플러그에 연결하십시오. Screw the Then connect the JST power plug to your draft vehicle or to some other voltage source.
송신기 LED가 켜져야 합니다.
같은 채널에 맞춰진 5.8GHz 수신 장치를 사용하여 비디오를 확인하십시오.
To configure the transmitter to an other channel and adjust the transmission power please refer to the [Tramp HV User Manual](https://www.immersionrc.com/?download=5016).
@@ -225,7 +225,7 @@ To configure the transmitter to an other channel and adjust the transmission pow
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/ko/frames_plane/reptile_dragon_2.md b/docs/ko/frames_plane/reptile_dragon_2.md
index 62b7d76a9f..b58284f293 100644
--- a/docs/ko/frames_plane/reptile_dragon_2.md
+++ b/docs/ko/frames_plane/reptile_dragon_2.md
@@ -62,19 +62,19 @@ Key build features
- [DJI FPV Goggles](https://www.dji.com/fpv)
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24)
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24)
- [5V BEC](https://www.readymaderc.com/products/details/rmrc-3a-power-regulator-5-to-6-volt-ubec)
- [6s2p 18650 LiIon flight battery](https://www.upgradeenergytech.com/product-page/6s-22-2v-5600mah-30c-dark-lithium-liion-drone-battery) (select XT60 connector)
-- [Custom designed 3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/rd2_3d_printed_parts.zip)
+- [Custom designed 3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/rd2_3d_printed_parts.zip)
- ARK6X carrier mount
- Holybro Pixhawk 5x carrier mount
- FPV pod and camera mount
- Pitot static probe "plug" adapter
-- [Custom designed power distribution PCB](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/xt30_power_distro_pcb.zip)
+- [Custom designed power distribution PCB](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/xt30_power_distro_pcb.zip)
- Misc hardware: M3 hardware (standoffs, washers, O-rings, bolts), M2.5 nylon standoffs and screws, XT30 connectors, hot glue, heatshrink, Molex Microfit connectors
@@ -377,7 +377,7 @@ make ark_fmu-v6x_default upload
This param file contains the custom PX4 parameter configuration for this build, including radio setup, tuning and sensor config.
Load the file via QGC using the instructions at [Parameters> Tools](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/parameters.html#tools) (QGC User Guide).
-- [Snapshot of PX4 airframe params](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/reptile_dragon_2_params.params)
+- [Snapshot of PX4 airframe params](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/reptile_dragon_2_params.params)
You may need to modify some parameters for your build
In particular you should check:
diff --git a/docs/ko/frames_plane/turbo_timber_evolution.md b/docs/ko/frames_plane/turbo_timber_evolution.md
index 557d5af805..e17641f2d1 100644
--- a/docs/ko/frames_plane/turbo_timber_evolution.md
+++ b/docs/ko/frames_plane/turbo_timber_evolution.md
@@ -54,9 +54,9 @@ Key Build Features:
- [DJI FPV Goggles](https://www.dji.com/fpv)
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24)
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24)
-- [Custom designed 3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip)
+- [Custom designed 3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip)
- Pixhawk 4 Mini mount and top GPS mount
- FPV pod and camera mount
- Pitot static pod and wing hardpoint hanger
@@ -117,7 +117,7 @@ After the first flight, the lid was hot glued in place.
## Flight Computer Installation
-A custom mount for the PX4 Mini was designed and 3d printed (see [3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip) for all parts).
+A custom mount for the PX4 Mini was designed and 3d printed (see [3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip) for all parts).
This mount was carefully designed to use internal foam mold features of the stock TTE airframe to be securely attached and well aligned.
The mount consists of two parts in a double-decker configuration, bolted together with M3 threaded standoffs.
The bottom mount carries the Pixhawk and attaches to the airframe while the top mount carries the GPS and ExpressLRS RX.
@@ -238,7 +238,7 @@ I use full flaps on landing to slow the otherwise slippery airframe.
### Parameter File
-[Snapshot of PX4 airframe params](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/tteparams.params)
+[Snapshot of PX4 airframe params](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/tteparams.params)
This param file contains the custom PX4 parameter config for this build, including radio setup, tuning and sensor config.
The param file can be loaded via QGC using the instructions at [Parameters> Tools ](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/parameters.html#tools) (QGC User Guide).
diff --git a/docs/ko/frames_rover/rover_position_control.md b/docs/ko/frames_rover/rover_position_control.md
index 053ee7d62d..6d01e16082 100644
--- a/docs/ko/frames_rover/rover_position_control.md
+++ b/docs/ko/frames_rover/rover_position_control.md
@@ -110,8 +110,8 @@ The idea was to develop a platform that allows for easy control of wheeled UGVs
- [Pixhawk Mini (Discontinued)](../flight_controller/pixhawk_mini.md)
- 3DR 10S 전원 모듈
- 3DR 433MHz Telemetry Module (EU)
-- [Spektrum Dxe Controller](http://www.spektrumrc.com/Products/Default.aspx?ProdId=SPM1000) or other PX4-compatible remotes
-- [Spektrum Quad Race Serial Receiver w/Diversity](http://www.spektrumrc.com/Products/Default.aspx?ProdID=SPM4648)
+- [Spektrum Dxe Controller](https://www.spektrumrc.com/product/dxe-dsmx-transmitter-with-ar610/SPM1000.html) or other PX4-compatible remotes
+- [Spektrum Quad Race Serial Receiver w/Diversity](https://www.spektrumrc.com/product/dsmx-quad-race-serial-receiver-with-diversity/SPM4648.html)
- [PX4Flow](../sensor/px4flow.md) (Deprecated)
### 조립
@@ -133,7 +133,7 @@ Tests showed that a better vibration insulation should be used, especially for t
For this particular mounting we chose to use the clip supplied with the rover to attach the upper plate.
For this, two supports were 3D printed.
-The CAD files are provided [here](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/rover/traxxas_stampede_vxl/plane_holders.zip).
+The CAD files are provided [here](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/rover/traxxas_stampede_vxl/plane_holders.zip).
:::warning
It is **HIGHLY RECOMMENDED** to set the ESC in training mode (see Traxxas Stampede Manual), which reduces power to 50%.
diff --git a/docs/ko/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md b/docs/ko/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
index b0fd3921e7..8405164f3a 100644
--- a/docs/ko/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
+++ b/docs/ko/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
@@ -28,9 +28,9 @@ RTF 키트에는 RC 수신기와 텔레메트리를 제외하고, 시스템에
- GPS u-blox M8N
- 전원 센서:
- [Airspeed Sensor](https://store-drotek.com/793-digital-differential-airspeed-sensor-kit-.html)
-- Quad power set [Tiger Motor MT-2216-11 900kv V2](https://www.getfpv.com/tiger-motor-mt-2216-11-900kv-v2.html) (discontinued)
+- Quad power set [Tiger Motor MT-2216-11 900kv V2](https://www.getfpv.com/tiger-motor-mt-2216-11-900kv-v2.html) (discontinued)
- 4 x 프로펠러 10”x 5”(쿼드 모터)
-- 4 x [ESC 25A](http://www.getfpv.com/tiger-motor-flame-25a-esc.html)
+- 4 x [ESC 25A](https://www.getfpv.com/tiger-motor-flame-25a-esc.html)
- 프로펠러 10”x 5”1 개 (푸셔 모터)
- 1 x ESC 30A
- 푸셔 모터 전원 시스템
@@ -255,7 +255,6 @@ GPS / 나침반 모듈은 기본 방향으로 날개에 이미 장착되어 있
:::
2. 차량이 예상 무게 중심 주변에서 균형을 이루는 지 확인하십시오.
-
- 손가락으로 기체의 무게 중심을 잡고 차량이 안정적인지 확인하십시오.

diff --git a/docs/ko/frames_vtol/vtol_quadplane_foxtech_loong_2160.md b/docs/ko/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
index 8a0e3359bb..93dc9fa2e8 100644
--- a/docs/ko/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
+++ b/docs/ko/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
@@ -51,7 +51,7 @@ The following options have been tested:
- [Groundstation and Radio link](https://holybro.com/collections/rc-radio-transmitter-receiver/products/skydroid-h12?variant=42940989931709)
- [USB-C extension cable](https://www.digitec.ch/en/s1/product/powerguard-usb-c-usb-c-025-m-usb-cables-22529949?dbq=1&gclid=Cj0KCQjw2cWgBhDYARIsALggUhrh-z-7DSU0wKfLBVa8filkXLQaxUpi7pC0ffQyRzLng8Ph01h2R1gaAp0mEALw_wcB&gclsrc=aw.ds)
- [I2C Splitter](https://www.3dxr.co.uk/autopilots-c2/the-cube-aka-pixhawk-2-1-c9/cube-cables-accessories-sensors-c15/cubepilot-i2c-can-splitter-jst-gh-4pin-p2840)
-- [3D-Printed mounts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong-3d-prints.zip)
+- [3D-Printed mounts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong-3d-prints.zip)
- 1x Baseplate
- 1x Stack-fixture
- 1x Fan-Mount
@@ -291,12 +291,12 @@ If you wish connect the actuators to different outputs you will need to modify t
### Load Parameters File
-Next we load a [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
+Next we load a [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
If you have followed the wiring instructions for the motors you probably won't need to do much further configuration other than sensor calibration and fixing the trims.
To load the file:
-1. Download the [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong.params).
+1. Download the [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong.params).
2. Select the [Parameters](../advanced_config/parameters.md#finding-updating-parameters) tab and then click on **Tools** in the top right corner.
3. Select **Load from file** and then choose the `loong.params` file you just downloaded.
4. 기체를 재부팅합니다.
diff --git a/docs/ko/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md b/docs/ko/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
index 54059d246b..7cb8848371 100644
--- a/docs/ko/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
+++ b/docs/ko/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
@@ -13,7 +13,7 @@ These instructions _should_ work with the updated vehicle: [TBS Caipirinha 2](ht
## 부품 목록
- TBS Caipirinha Wing (no longer available - try [TBS Caipirinha 2](https://team-blacksheep.com/products/prod:tbs_caipi2_pnp))
-- Left and right 3D-printed motor mount (design files)
+- Left and right 3D-printed motor mount (design files)
- CW 8045 propeller ([Eflight store](https://www.banggood.com/GEMFAN-Carbon-Nylon-8045-CWCCW-Propeller-For-Quadcopters-1-Pair-p-950874.html))
- CCW 8045 propeller ([Eflight store](https://www.banggood.com/GEMFAN-Carbon-Nylon-8045-CWCCW-Propeller-For-Quadcopters-1-Pair-p-950874.html))
- 2x 1800 kV 120-180W 모터
diff --git a/docs/ko/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md b/docs/ko/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
index a1c0c5d883..5cab5bacce 100644
--- a/docs/ko/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
+++ b/docs/ko/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
@@ -47,12 +47,12 @@ The approximate maximum size of the FC is: 50x110x22mm
- [Airspeed sensor (cheaper alternative)](https://holybro.com/products/digital-air-speed-sensor?pr_prod_strat=use_description&pr_rec_id=236dfda00&pr_rec_pid=7150470561981&pr_ref_pid=7150472462525&pr_seq=uniform)
- [Lidar Lightware lw20-c (included in Skynode eval. kit)](../sensor/sfxx_lidar.md) (Optional)
- [Lidar Seeed Studio PSK-CM8JL65-CC5 (cheaper alternative)](https://www.seeedstudio.com/PSK-CM8JL65-CC5-Infrared-Distance-Measuring-Sensor-p-4028.html) (Optional)
-- [5V BEC](http://www.mateksys.com/?portfolio=bec12s-pro)
+- [5V BEC](https://www.mateksys.com/?portfolio=bec12s-pro)
- [Radio (RC) System](../getting_started/rc_transmitter_receiver.md) of your preference
- [Servo cable extension cable male 30cm 10 pcs](https://www.getfpv.com/male-to-male-servo-extension-cable-twisted-22awg-jr-style-5-pcs.html)
- [USB-C extension cable](https://www.digitec.ch/en/s1/product/powerguard-usb-c-usb-c-025-m-usb-cables-22529949?dbq=1&gclid=Cj0KCQjw2cWgBhDYARIsALggUhrh-z-7DSU0wKfLBVa8filkXLQaxUpi7pC0ffQyRzLng8Ph01h2R1gaAp0mEALw_wcB&gclsrc=aw.ds)
- [3M VHB tape](https://www.amazon.in/3M-VHB-Tape-4910-Length/dp/B00GTABM3Y)
-- [3D-Printed mounts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo_3d_prints.zip)
+- [3D-Printed mounts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo_3d_prints.zip)
- 2x wing connector mount
- 1x Airspeed sensor mount
- 1x GPS-Mount
@@ -159,7 +159,6 @@ The connector glued into the fuselage. Make sure to properly align the connector
If you own a crimp tool, then you can also directly add the connectors without soldering.
2. Plug the servo cables into the adapter IO board in the following order:
-
- 1 - Aileron left
- 2 - Aileron right
- 3 - V-Tail left
@@ -168,7 +167,6 @@ The connector glued into the fuselage. Make sure to properly align the connector
- 6 - Tilt right
3. Plug in the motor signal cables into the FMU adapter board in the following order:
-
- 1 - Front left
- 2 - Front right
- 3 - Rear
@@ -281,12 +279,12 @@ An inexpensive example would be a [SiK Telemetry Radio](../telemetry/sik_radio.m
### Load Parameters File
-Next we load a [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
+Next we load a [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
If you have followed the wiring instructions for the motors you probably won't need to do much further configuration other than sensor calibration and fixing the trims.
To load the file:
-1. Download the [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params).
+1. Download the [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params).
2. Select the [Parameters](../advanced_config/parameters.md#finding-updating-parameters) tab and then click on **Tools** in the top right corner.
3. Select **Load from file** and then choose the `omp_hobby_zmo.params` file you just downloaded.
4. 기체를 재부팅합니다.
diff --git a/docs/ko/getting_started/flight_reporting.md b/docs/ko/getting_started/flight_reporting.md
index 9c0408f588..1cce986830 100644
--- a/docs/ko/getting_started/flight_reporting.md
+++ b/docs/ko/getting_started/flight_reporting.md
@@ -9,7 +9,7 @@ Keeping flight logs is a legal requirement in some jurisdictions.
## 비행 콘트롤러에서 로그 다운로드
-Logs can be downloaded using [QGroundControl](http://qgroundcontrol.com/): **[Analyze View > Log Download](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/analyze_view/log_download.html)**.
+Logs can be downloaded using [QGroundControl](https://qgroundcontrol.com/): **[Analyze View > Log Download](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/analyze_view/log_download.html)**.

@@ -21,7 +21,7 @@ You can also host a [private Flight Review server](../dev_log/log_encryption.md#
## 로그 분석
-Upload the log file to the online [Flight Review](http://logs.px4.io) tool.
+Upload the log file to the online [Flight Review](https://logs.px4.io/) tool.
After upload you'll be emailed a link to the analysis page for the log.
[Log Analysis using Flight Review](../log/flight_review.md) explains how to interpret the plots, and can help you to verify/reject the causes of common problems: excessive vibration, poor PID tuning, saturated controllers, imbalanced vehicles, GPS noise, etc.
@@ -38,17 +38,17 @@ For more information see [Settings > MAVLink Settings > MAVLink 2 Logging (PX4 o
## PX4 개발자가 검토할 로그 파일 공유
-The [Flight Review](http://logs.px4.io) log file link can be shared for discussion in the [support forums](../contribute/support.md#forums-and-chat) or a [Github issue](../index.md#reporting-bugs-issues).
+The [Flight Review](https://logs.px4.io/) log file link can be shared for discussion in the [support forums](../contribute/support.md#forums-and-chat) or a [Github issue](../index.md#reporting-bugs-issues).
## 로그 설정
-The logging system is configured by default to collect sensible logs for use with [Flight Review](http://logs.px4.io).
+The logging system is configured by default to collect sensible logs for use with [Flight Review](https://logs.px4.io/).
Logging may further be configured using the [SD Logging](../advanced_config/parameter_reference.md#sd-logging) parameters or with a file on the SD card.
Details on configuration can be found in the [logging configuration documentation](../dev_log/logging.md#configuration).
## 주요 링크
-- [Flight Review](http://logs.px4.io)
+- [Flight Review](https://logs.px4.io/)
- [Log Analysis using Flight Review](../log/flight_review.md)
- [Flight Log Analysis](../dev_log/flight_log_analysis.md)
diff --git a/docs/ko/getting_started/px4_basic_concepts.md b/docs/ko/getting_started/px4_basic_concepts.md
index eedaa753c3..663de0e58e 100644
--- a/docs/ko/getting_started/px4_basic_concepts.md
+++ b/docs/ko/getting_started/px4_basic_concepts.md
@@ -62,9 +62,9 @@ PX4의 주요 특징들은 아래와 같습니다.
- Supports many different vehicle frames/types, including: [multicopters](../frames_multicopter/index.md), [fixed-wing aircraft](../frames_plane/index.md) (planes), [VTOLs](../frames_vtol/index.md) (hybrid multicopter/fixed-wing), [ground vehicles](../frames_rover/index.md), and [underwater vehicles](../frames_sub/index.md).
- Great choice of drone components for [flight controller](#flight-controller), [sensors](#sensors), [payloads](#payloads), and other peripherals.
- Flexible and powerful [flight modes](#flight-modes) and [safety features](#safety-settings-failsafe).
-- Robust and deep integration with [companion computers](#offboard-companion-computer) and [robotics APIs](../robotics/index.md) such as [ROS 2](../ros2/user_guide.md) and [MAVSDK](http://mavsdk.mavlink.io).
+- Robust and deep integration with [companion computers](#offboard-companion-computer) and [robotics APIs](../robotics/index.md) such as [ROS 2](../ros2/user_guide.md) and [MAVSDK](https://mavsdk.mavlink.io/main/en/index.html).
-PX4 is a core part of a broader drone platform that includes the [QGroundControl](#qgc) ground station, [Pixhawk hardware](https://pixhawk.org/), and [MAVSDK](http://mavsdk.mavlink.io) for integration with companion computers, cameras and other hardware using the MAVLink protocol.
+PX4 is a core part of a broader drone platform that includes the [QGroundControl](#qgc) ground station, [Pixhawk hardware](https://pixhawk.org/), and [MAVSDK](https://mavsdk.mavlink.io/main/en/index.html) for integration with companion computers, cameras and other hardware using the MAVLink protocol.
PX4 is supported by the [Dronecode Project](https://www.dronecode.org/).
## Ground Control Stations
@@ -74,9 +74,9 @@ A subset of the products that are known to work with PX4 are listed below.
### QGroundControl {#qgc}
-The Dronecode GCS software is called [QGroundControl](http://qgroundcontrol.com/) ("QGC").
+The Dronecode GCS software is called [QGroundControl](https://qgroundcontrol.com/) ("QGC").
It runs on Windows, Android, MacOS or Linux hardware, and supports a wide range of screen form factors.
-You can download it (for free) from [here](http://qgroundcontrol.com/downloads/).
+You can download it (for free) from [here](https://qgroundcontrol.com/downloads/).

diff --git a/docs/ko/getting_started/rc_transmitter_receiver.md b/docs/ko/getting_started/rc_transmitter_receiver.md
index 5480a1019b..071945f2d7 100644
--- a/docs/ko/getting_started/rc_transmitter_receiver.md
+++ b/docs/ko/getting_started/rc_transmitter_receiver.md
@@ -99,7 +99,6 @@ _PX4_ and _Pixhawk_ have been validated with:
- PPM sum receivers
- S.BUS and S.BUS2 receivers from:
-
- Futaba
- FrSky S.BUS and PPM models
- TBS Crossfire with SBUS as output protocol
@@ -131,7 +130,7 @@ The receivers we have tested all now appear to be compatible, but it is possible
- Graupner HoTT receivers: SUMD output must connect to a **SPKT/DSM** input (as above).
- PPM-Sum and S.BUS receivers must connect directly to the **RC** ground, power and signal pins.
This is typically labeled: `RC IN`, `RCIN` or `RC`, but has in some FCs has been labeled `PPM RC` or `PPM`.
-- PPM receivers that have an individual wire for each channel must connect to the RCIN channel _via_ a PPM encoder [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM receivers that have an individual wire for each channel must connect to the RCIN channel _via_ a PPM encoder [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
- TBS Crossfire/Express LRS Receivers using [CRSF Telemetry](../telemetry/crsf_telemetry.md) connect via a spare UART.
Flight controllers usually include appropriate cables for connecting common receiver types.
diff --git a/docs/ko/gps_compass/gps_hex_here2.md b/docs/ko/gps_compass/gps_hex_here2.md
index 86e4f64a57..d461e7b0c4 100644
--- a/docs/ko/gps_compass/gps_hex_here2.md
+++ b/docs/ko/gps_compass/gps_hex_here2.md
@@ -4,7 +4,7 @@
This has been superseded by the [Cube Here 3](https://www.cubepilot.com/#/here/here3)
:::
-The [Here2 GPS receiver](http://www.proficnc.com/all-products/152-gps-module.html) is an update to the Here GPS module from HEX.
+The _Here2 GPS receiver_ is an update to the Here GPS module from HEX.
주요 특징은 다음과 같습니다.
@@ -18,8 +18,7 @@ The [Here2 GPS receiver](http://www.proficnc.com/all-products/152-gps-module.htm
## 구매처
-- [ProfiCNC](http://www.proficnc.com/all-products/152-gps-module.html) (Australia)
-- [Other resellers](http://www.proficnc.com/stores)
+- [Resellers](https://www.cubepilot.com/#/reseller/list)
## 설정
@@ -34,7 +33,7 @@ PX4의 설정과 사용법은 대부분 플러그앤플레이입니다.
## 배선
-The Here2 GPS comes with an 8 pin connector that can be inserted directly into the [Pixhawk 2](http://www.hex.aero/wp-content/uploads/2016/07/DRS_Pixhawk-2-17th-march-2016.pdf) GPS UART port.
+The Here2 GPS comes with an 8 pin connector that can be inserted directly into the Pixhawk 2 `GPS` UART port.
Pixhawk 3 Pro와 Pixracer에는 6 핀 GPS 포트 커넥터가 있습니다.
이러한 컨트롤러에서는 GPS 케이블 (아래 그림 참조)을 수정하여 핀 6과 7을 제거할 수 있습니다.
diff --git a/docs/ko/gps_compass/index.md b/docs/ko/gps_compass/index.md
index 95aaf16b75..13aa607cc1 100644
--- a/docs/ko/gps_compass/index.md
+++ b/docs/ko/gps_compass/index.md
@@ -47,7 +47,7 @@ These have been tested by the PX4 dev team, or which are popular within the PX4
| [mRo GPS u-blox Neo-M8N Dual Compass][mro_neo8mn_dual_mag] | M8N | LIS3MDL, IST8308 | | ✘ | |
| [RaccoonLab L1 GNSS NEO-M8N][RccnLabGNSS250] | NEO-M8N | RM3100 | ✓ | ✘✘✓ | + Baro |
| [Sky-Drones SmartAP GPS](../gps_compass/gps_smartap.md) | M8N | HMC5983, IST8310, LIS3MDL | | ✓ | + Baro |
-| [Zubax GNSS 2](https://zubax.com/products/gnss_2) | MAX-M8Q | LIS3MDL | | ✘ | + Baro |
+| [Zubax GNSS 2](https://shop.zubax.com/products/zubax-gnss-2) | MAX-M8Q | LIS3MDL | | ✘ | + Baro |
@@ -145,7 +145,6 @@ To ensure the port is set up correctly perform a [Serial Port Configuration](../
The following steps show how to configure a secondary GPS on the `GPS 2` port in _QGroundControl_:
1. [Find and set](../advanced_config/parameters.md) the parameter [GPS_2_CONFIG](../advanced_config/parameter_reference.md#GPS_2_CONFIG) to **GPS 2**.
-
- Open _QGroundControl_ and navigate to the **Vehicle Setup > Parameters** section.
- Select the **GPS** tab, then open the [GPS_2_CONFIG](../advanced_config/parameter_reference.md#GPS_2_CONFIG) parameter and select `GPS 2` from the dropdown list.
diff --git a/docs/ko/gps_compass/rtk_gps.md b/docs/ko/gps_compass/rtk_gps.md
index 78d1cbd270..1d40ffce20 100644
--- a/docs/ko/gps_compass/rtk_gps.md
+++ b/docs/ko/gps_compass/rtk_gps.md
@@ -14,47 +14,48 @@ Some RTK GNSS setups can provide yaw/heading information, as an alternative to t
## 지원되는 RTK 장치
-PX4 supports the [u-blox M8P](https://www.u-blox.com/en/product/neo-m8p), [u-blox F9P](https://www.u-blox.com/en/product/zed-f9p-module) and the [Trimble MB-Two](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) GPS, and products that incorporate them.
+PX4 supports the [u-blox M8P](https://www.u-blox.com/en/product/neo-m8p), [u-blox F9P](https://www.u-blox.com/en/product/zed-f9p-module) and the [Trimble MB-Two](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) GPS, and products that incorporate them.
:::note
일부 RTK 모듈은 특정 기능(베이스 또는 로버)으로만 사용할 수 있는 반면, 다른 모듈은 서로 교환하여 사용할 수 있습니다.
The table indicates devices that also output yaw, and that can provide yaw when two on-vehicle units are used.
It also highlights devices that connect via the CAN bus, and those which support PPK (Post-Processing Kinematic).
-| 장치 | GPS | 나침반 | [DroneCAN](../dronecan/index.md) | [GPS Yaw](#configuring-gps-as-yaw-heading-source) | PPK |
-| :------------------------------------------------------------------------------------------------------------------- | :------------------: | :------: | :------------------------------: | :-----------------------------------------------: | :-: |
-| [ARK RTK GPS](../dronecan/ark_rtk_gps.md) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
-| [ARK MOSAIC-X5 RTK GPS](../dronecan/ark_mosaic__rtk_gps.md) | Mosaic-X5 | IIS2MDC | ✓ | [Septentrio Dual Antenna][SeptDualAnt] | |
-| [CUAV C-RTK GPS](../gps_compass/rtk_gps_cuav_c-rtk.md) | M8P/M8N | ✓ | | | |
-| [CUAV C-RTK2](../gps_compass/rtk_gps_cuav_c-rtk2.md) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [CUAV C-RTK 9Ps GPS](../gps_compass/rtk_gps_cuav_c-rtk-9ps.md) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [CUAV C-RTK2 PPK/RTK GNSS](../gps_compass/rtk_gps_cuav_c-rtk.md) | F9P | RM3100 | | | ✓ |
-| [CubePilot Here+ RTK GPS](../gps_compass/rtk_gps_hex_hereplus.md) | M8P | HMC5983 | | | |
-| [CubePilot Here3 CAN GNSS GPS (M8N)](https://www.cubepilot.org/#/here/here3) | M8P | ICM20948 | ✓ | | |
-| [Drotek SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [DATAGNSS GEM1305 RTK Receiver][DATAGNSS GEM1305 RTK] | TAU951M | ✘ | | ✘ | |
-| [Femtones MINI2 Receiver](../gps_compass/rtk_gps_fem_mini2.md) | FB672, FB6A0 | ✓ | | | |
-| [Freefly RTK GPS](../gps_compass/rtk_gps_freefly.md) | F9P | IST8310 | | | |
-| [Holybro H-RTK ZED-F9P RTK Rover (DroneCAN variant)](../dronecan/holybro_h_rtk_zed_f9p_gps.md) | F9P | RM3100 | ✓ | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK ZED-F9P RTK Rover](https://holybro.com/collections/h-rtk-gps/products/h-rtk-zed-f9p-rover) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Ultralight](https://holybro.com/products/h-rtk-f9p-ultralight) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Helical or Base](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
-| [Holybro DroneCAN H-RTK F9P Helical](https://holybro.com/products/dronecan-h-rtk-f9p-helical) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Rover Lite](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | | |
-| [Holybro DroneCAN H-RTK F9P Rover](https://holybro.com/products/dronecan-h-rtk-f9p-rover) | F9P | BMM150 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK M8P GNSS](../gps_compass/rtk_gps_holybro_h-rtk-m8p.md) | M8P | IST8310 | | | |
-| [Holybro H-RTK Unicore UM982 GPS](../gps_compass/rtk_gps_holybro_unicore_um982.md) | UM982 | IST8310 | | [Unicore Dual Antenna][UnicoreDualAnt] | |
-| [LOCOSYS Hawk R1](../gps_compass/rtk_gps_locosys_r1.md) | MC-1612-V2b | | | | |
-| [LOCOSYS Hawk R2](../gps_compass/rtk_gps_locosys_r2.md) | MC-1612-V2b | IST8310 | | | |
-| [mRo u-blox ZED-F9 RTK L1/L2 GPS](https://store.mrobotics.io/product-p/m10020d.htm) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [Navisys L1/L2 ZED-F9P RTK - Base only](https://www.navisys.com.tw/productdetail?name=GR901&class=RTK) | F9P | | | | |
-| [RaccoonLab L1/L2 ZED-F9P][RaccoonLab L1/L2 ZED-F9P] | F9P | RM3100 | ✓ | | |
-| [RaccoonLab L1/L2 ZED-F9P with external antenna][RaccnLabL1L2ZED-F9P ext_ant] | F9P | RM3100 | ✓ | | |
-| [Septentrio AsteRx-m3 Pro](../gps_compass/septentrio_asterx-rib.md) | AsteRx | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
-| [Septentrio mosaic-go](../gps_compass/septentrio_mosaic-go.md) | mosaic X5 / mosaic H | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
-| [SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [SparkFun GPS-RTK2 Board - ZED-F9P](https://www.sparkfun.com/products/15136) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [Trimble MB-Two](../gps_compass/rtk_gps_trimble_mb_two.md) | F9P | ✓ | | ✓ | |
+| 장치 | GPS | 나침반 | [DroneCAN](../dronecan/index.md) | [GPS Yaw](#configuring-gps-as-yaw-heading-source) | PPK |
+| :------------------------------------------------------------------------------------------------------------------- | :---------------------------------------------------------: | :------: | :------------------------------: | :-----------------------------------------------: | :-: |
+| [ARK RTK GPS](../dronecan/ark_rtk_gps.md) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
+| [ARK MOSAIC-X5 RTK GPS](../dronecan/ark_mosaic__rtk_gps.md) | Mosaic-X5 | IIS2MDC | ✓ | [Septentrio Dual Antenna][SeptDualAnt] | |
+| [CUAV C-RTK GPS](../gps_compass/rtk_gps_cuav_c-rtk.md) | M8P/M8N | ✓ | | | |
+| [CUAV C-RTK2](../gps_compass/rtk_gps_cuav_c-rtk2.md) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [CUAV C-RTK 9Ps GPS](../gps_compass/rtk_gps_cuav_c-rtk-9ps.md) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [CUAV C-RTK2 PPK/RTK GNSS](../gps_compass/rtk_gps_cuav_c-rtk.md) | F9P | RM3100 | | | ✓ |
+| [CubePilot Here+ RTK GPS](../gps_compass/rtk_gps_hex_hereplus.md) | M8P | HMC5983 | | | |
+| [CubePilot Here3 CAN GNSS GPS (M8N)](https://www.cubepilot.org/#/here/here3) | M8P | ICM20948 | ✓ | | |
+| [Drotek SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [DATAGNSS NANO HRTK Receiver](../gps_compass/rtk_gps_datagnss_nano_hrtk.md) | [D10P](https://docs.datagnss.com/gnss/gnss_module/D10P_RTK) | IST8310 | | ✘ | |
+| [DATAGNSS GEM1305 RTK Receiver](../gps_compass/rtk_gps_gem1305.md) | TAU951M | IST8310 | | ✘ | |
+| [Femtones MINI2 Receiver](../gps_compass/rtk_gps_fem_mini2.md) | FB672, FB6A0 | ✓ | | | |
+| [Freefly RTK GPS](../gps_compass/rtk_gps_freefly.md) | F9P | IST8310 | | | |
+| [Holybro H-RTK ZED-F9P RTK Rover (DroneCAN variant)](../dronecan/holybro_h_rtk_zed_f9p_gps.md) | F9P | RM3100 | ✓ | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK ZED-F9P RTK Rover](https://holybro.com/collections/h-rtk-gps/products/h-rtk-zed-f9p-rover) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Ultralight](https://holybro.com/products/h-rtk-f9p-ultralight) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Helical or Base](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
+| [Holybro DroneCAN H-RTK F9P Helical](https://holybro.com/products/dronecan-h-rtk-f9p-helical) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Rover Lite](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | | |
+| [Holybro DroneCAN H-RTK F9P Rover](https://holybro.com/products/dronecan-h-rtk-f9p-rover) | F9P | BMM150 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK M8P GNSS](../gps_compass/rtk_gps_holybro_h-rtk-m8p.md) | M8P | IST8310 | | | |
+| [Holybro H-RTK Unicore UM982 GPS](../gps_compass/rtk_gps_holybro_unicore_um982.md) | UM982 | IST8310 | | [Unicore Dual Antenna][UnicoreDualAnt] | |
+| [LOCOSYS Hawk R1](../gps_compass/rtk_gps_locosys_r1.md) | MC-1612-V2b | | | | |
+| [LOCOSYS Hawk R2](../gps_compass/rtk_gps_locosys_r2.md) | MC-1612-V2b | IST8310 | | | |
+| [mRo u-blox ZED-F9 RTK L1/L2 GPS](https://store.mrobotics.io/product-p/m10020d.htm) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [Navisys L1/L2 ZED-F9P RTK - Base only](https://www.navisys.com.tw/productdetail?name=GR901&class=RTK) | F9P | | | | |
+| [RaccoonLab L1/L2 ZED-F9P][RaccoonLab L1/L2 ZED-F9P] | F9P | RM3100 | ✓ | | |
+| [RaccoonLab L1/L2 ZED-F9P with external antenna][RaccnLabL1L2ZED-F9P ext_ant] | F9P | RM3100 | ✓ | | |
+| [Septentrio AsteRx-m3 Pro](../gps_compass/septentrio_asterx-rib.md) | AsteRx | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
+| [Septentrio mosaic-go](../gps_compass/septentrio_mosaic-go.md) | mosaic X5 / mosaic H | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
+| [SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [SparkFun GPS-RTK2 Board - ZED-F9P](https://www.sparkfun.com/products/15136) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [Trimble MB-Two](../gps_compass/rtk_gps_trimble_mb_two.md) | F9P | ✓ | | ✓ | |
@@ -143,7 +144,6 @@ RTK GPS 연결은 기본적으로 플러그앤플레이입니다.

4. Survey-in이 완료되면 :
-
- The RTK GPS icon changes to white and _QGroundControl_ starts to stream position data to the vehicle:

diff --git a/docs/ko/gps_compass/rtk_gps_datagnss_nano_hrtk.md b/docs/ko/gps_compass/rtk_gps_datagnss_nano_hrtk.md
new file mode 100644
index 0000000000..4db5b0567e
--- /dev/null
+++ b/docs/ko/gps_compass/rtk_gps_datagnss_nano_hrtk.md
@@ -0,0 +1,123 @@
+# DATAGNSS NANO HRTK receiver
+
+NANO HRTK receiver is a RTK receiver designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
+
+It is a high performance dual-band RTK receiver with compass, which is based on CYNOSURE series chipset.
+It supports global civil navigation systems, including GPS, BDS, GLONASS, Galileo, QZSS, and SBAS.
+
+NANO HRTK receiver support compass.
+It is designed for UAV, RTK, and other applications.
+
+
+
+:::info
+The NANO HRTK Receiver supports both base and rover options.
+It does not yet support _moving base_ mode.
+:::
+
+## 구매처
+
+- [NANO HRTK receiver](https://www.datagnss.com/collections/gnss-for-drone/products/nano-helix-rtk-receiver) (www.datagnss.com)
+
+## 주요 특징
+
+- Full constellation, multi-frequency GNSS satellite receiver
+- Support RTK with up to 10hz output rate
+- Standard UART serial interface
+- Lightweight and compact size
+
+## Frequencies
+
+- GPS/QZSS: L1 C/A, L5C
+- GLONASS: L1OF
+- BEIDOU: B1I, B2a
+- GALILEO: E1, E5a
+- IRNSS: L5
+
+## GNSS
+
+- 128 hardware channels
+- 3D accuracy: **1.5m** CEP
+- RTK accuracy: **2cm** +1PPM(H), 3cm+1PPM(V)
+
+## 인터페이스
+
+- UART \*2 : 230400bps default
+- SMA connector for antenna
+- Output rate 5Hz default, up to 10Hz
+- Main power supply: 4.7~5.2V
+
+## Protocol
+
+- NMEA-0183 output
+- RTCM3.x input/output
+
+## Environment
+
+- Operating temp. -20~85°C
+
+## Dimension and Weight
+
+- 35x30mm
+- 25g
+
+## 핀배열
+
+The board is connected to the autopilot via UART interface.
+
+
+
+The 1.25mm pitch 6P connector supports UART for GNSS and I2C for compass.
+
+
+
+## 하드웨어 설정
+
+RTK requires a base RTK module attached to the ground station, and a rover RTK module on the vehicle.
+The data from the base needs to be transmitted to the drone via telemetry radio and sent to the RTK receiver on the rover.
+
+
+
+The setup/connections for base and rover modules are shown below.
+
+### Base Setup (GCS)
+
+The base station connections are shown in the diagram below, along with the connection to a telemetry radio.
+
+
+
+Note that for the base we recommend the [NANO RTK Receiver](https://www.datagnss.com/collections/gnss-for-drone/products/multi-band-rtk-receiver-package) because it is easier to setup.
+
+
+
+See to [How to setup Base station](https://wiki.datagnss.com/index.php/GEM1305-autopilot#Base_station_setup) for information on how to configure the module for use as a base station (not including step 6 and later, for which you would QGroundControl instead of Mission Planner).
+
+### Rover Setup (PX4)
+
+The rover setup showing connections to a GPS port and the (required) connection to a telemetry radio are shown in the diagram below.
+
+
+
+The diagram below shows the wiring from the `GPS2` port on the Pixhawk 6c flight controller.
+Note that an appropriate cable is supplied for this purpose.
+
+GPS and RTK configuration on PX4 via _QGroundControl_ is plug and play (see [RTK GPS](../gps_compass/rtk_gps.md) for more information).
+
+## Package List
+
+- NANO HRTK Receiver
+- DG-6P-Cxx, GH-1.25mm-GH 6P cable
+- Helix antenna L1/L2/L5 (optional)
+
+## Resources
+
+- [NANO RTK Receiver 2D drawing file](https://wiki.datagnss.com/images/3/31/EVK-DG-1206_V.2.0.pdf)
+- [NANO HRTK Receiver Wiki](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-helix-rtk/) (DATAGNSS WiKi)
+- [HED-10L Heading RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/HED-10L/)
+
+## More information
+
+- [NANO RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-rtk-receiver)
+- [HELIX Antenna for RTK](https://www.datagnss.com/collections/rtk-antenna/products/smart-helix-antenna)
+- [RTK Antenna AGR6302G](https://www.datagnss.com/collections/rtk-antenna/products/antenna-agr6302g)
+- [AT400 RTK Antenna](https://www.datagnss.com/collections/rtk-antenna/products/at400-multi-band-antenna-for-rtk)
diff --git a/docs/ko/gps_compass/rtk_gps_gem1305.md b/docs/ko/gps_compass/rtk_gps_gem1305.md
index 3253afbb9d..a10248fed2 100644
--- a/docs/ko/gps_compass/rtk_gps_gem1305.md
+++ b/docs/ko/gps_compass/rtk_gps_gem1305.md
@@ -1,24 +1,22 @@
# DATAGNSS GEM1305 RTK Receiver with antenna
-GEM1305 is a RTK receiver with antenna designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
+GEM1305 is an [RTK GNSS](../gps_compass/rtk_gps.md) receiver with antenna designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
GEM1305 is based on the new generation CYNOSURE IV dual-core GNSS SoC.
It supports RTK functionality with a maximum data update rate of 10Hz, and comes with cables for connecting to GPS ports on most Pixhawk devices.
-
-- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM and PWM receivers that have an _individual wire for each channel_ must connect to the **RCIN** port _via a PPM encoder_ [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
For more information about selecting a radio system, receiver compatibility, and binding your transmitter/receiver pair, see: [Remote Control Transmitters & Receivers](../getting_started/rc_transmitter_receiver.md).
diff --git a/docs/ko/flight_controller/pixhawk_series.md b/docs/ko/flight_controller/pixhawk_series.md
index d42777e771..979404a53a 100644
--- a/docs/ko/flight_controller/pixhawk_series.md
+++ b/docs/ko/flight_controller/pixhawk_series.md
@@ -41,7 +41,7 @@ The [Pixhawk project](https://pixhawk.org/) creates open hardware designs in the
Manufacturers are encouraged to take the [open designs](https://github.com/pixhawk/Hardware) and create products that are best suited to a particular market or use case (the physical layout/form factor not part of the open specification). 동일한 디자인의 보드는 바이너리 수준에서 호환이 가능합니다.
:::info
-While a physical connector standard is not mandated, newer products generally follow the [Pixhawk Connector Standard](https://pixhawk.org/pixhawk-connector-standard/).
+While a physical connector standard is not mandated, newer products generally follow the [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf).
:::
The project also creates reference autopilot boards based on the open designs, and shares them under the same [licence](#licensing-and-trademarks).
diff --git a/docs/ko/flight_controller/pixracer.md b/docs/ko/flight_controller/pixracer.md
index 84c9fe9a6a..ade809f2df 100644
--- a/docs/ko/flight_controller/pixracer.md
+++ b/docs/ko/flight_controller/pixracer.md
@@ -16,7 +16,7 @@ This autopilot is [supported](../flight_controller/autopilot_pixhawk_standard.md
## 주요 특징
-- Main System-on-Chip: [STM32F427VIT6 rev.3](http://www.st.com/web/en/catalog/mmc/FM141/SC1169/SS1577/LN1789)
+- Main System-on-Chip: [STM32F427VIT6 rev.3](https://www.st.com/en/microcontrollers-microprocessors/stm32f427-437.html)
- CPU : 단정밀도 FPU의 180MHz ARM Cortexex® M4
- RAM : 256KB SRAM (L1)
- 표준 FPV 폼 팩터 : 36x36mm, 표준 30.5mm 구멍 패턴
@@ -41,7 +41,8 @@ Pixracer is available from the [mRobotics.io](https://store.mrobotics.io/mRo-Pix
## 키트
-Pixracer는 별도의 항공전자기기 전원공급장치를 사용하도록 설계되었습니다. 이는 모터 또는 ESC의 전류 서지가 비행 컨트롤러로 다시 흐르고 섬세한 센서를 방해하는 것을 방지하는 데 필요합니다.
+Pixracer는 별도의 항공전자기기 전원공급장치를 사용하도록 설계되었습니다.
+이는 모터 또는 ESC의 전류 서지가 비행 컨트롤러로 다시 흐르고 섬세한 센서를 방해하는 것을 방지하는 데 필요합니다.
- 전원 모듈(전압 및 전류 감지 포함)
- I2C 스플리터(AUAV, Hobbyking 및 3DR® 주변 장치 지원)
@@ -53,7 +54,7 @@ Pixracer는 별도의 항공전자기기 전원공급장치를 사용하도록
이를 통해 데스크탑 시스템이 필요없습니다.
- [ESP8266 Wifi](../telemetry/esp8266_wifi_module.md)
-- [Custom ESP8266 MAVLink firmware](https://github.com/dogmaphobic/mavesp8266)
+- [Custom ESP8266 MAVLink firmware](https://github.com/BeyondRobotix/mavesp8266)
:::info
Firmware upgrade is not yet enabled over WiFi (it is supported by the default bootloader but not yet enabled).
@@ -85,7 +86,7 @@ For more information see: [Pixracer Wiring Quickstart > External Telemetry](../a
## 커넥터
-All connectors follow the [Pixhawk connector standard](https://pixhawk.org/pixhawk-connector-standard/).
+All connectors follow the [Pixhawk connector standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf).
Unless noted otherwise all connectors are JST GH.
## 핀배열
@@ -204,8 +205,8 @@ The reference is provided as: [Altium Design Files](https://github.com/AUAV-Open
The following PDF files are provided for _convenience only_:
-- [pixracer-rc12-12-06-2015-1330.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixracer/pixracer-rc12-12-06-2015-1330.pdf)
-- [pixracer-r14.pdf](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixracer/pixracer-r14.pdf) - R14 or RC14 is printed next to the SDCard socket
+- [pixracer-rc12-12-06-2015-1330.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixracer/pixracer-rc12-12-06-2015-1330.pdf)
+- [pixracer-r14.pdf](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixracer/pixracer-r14.pdf) - R14 or RC14 is printed next to the SDCard socket
## 펌웨어 빌드
diff --git a/docs/ko/flight_controller/raccoonlab_fmu6x.md b/docs/ko/flight_controller/raccoonlab_fmu6x.md
index 2ac7e1a86c..a692b0d83f 100644
--- a/docs/ko/flight_controller/raccoonlab_fmu6x.md
+++ b/docs/ko/flight_controller/raccoonlab_fmu6x.md
@@ -159,4 +159,4 @@ The complete set of supported configurations can be seen in the [Airframes Refer
- [Pixhawk Autopilot FMUv6X Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-012%20Pixhawk%20Autopilot%20v6X%20Standard.pdf)
- [Pixhawk Autopilot Bus Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-010%20Pixhawk%20Autopilot%20Bus%20Standard.pdf)
- [Pixhawk Connector Standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf)
-- [RaccoonLab docs](http://docs.raccoonlab.co)
+- [RaccoonLab docs](https://docs.raccoonlab.co/)
diff --git a/docs/ko/flight_controller/thepeach_k1.md b/docs/ko/flight_controller/thepeach_k1.md
index 9f83e75a61..75ba377045 100644
--- a/docs/ko/flight_controller/thepeach_k1.md
+++ b/docs/ko/flight_controller/thepeach_k1.md
@@ -14,21 +14,17 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
## 사양
- Main 프로세서: STM32F427VIT6
-
- 32bit ARM Cortex-M4, 168 MHz 256 KB RAM 2 MB Flash memory
- IO 프로세서: STM32F100C8T6
-
- ARM Cortex-M3, 32bit ARM Cortex-M3, 24 MHz, 8KB SRAM
- 내장 센서 :
-
- 가속도/자이로: ICM-20602
- 가속도/자이로스코프/지자기: MPU-9250
- 기압계: MS5611
- 인터페이스
-
- 8+5개의 PWM 출력 (IO 8개, FMU 5개)
- Spektrum DSM / DSM2 / DSM-X Satellite 입력 호환
- Futaba S.BUS 입출력 호환
@@ -98,4 +94,4 @@ make thepeach_k1_default
## 구매처
-Order from [ThePeach](http://thepeach.shop/)
+Order from [ThePeach](https://thepeach.shop/)
diff --git a/docs/ko/flight_controller/thepeach_r1.md b/docs/ko/flight_controller/thepeach_r1.md
index 5fe45fed31..a07044eeaa 100644
--- a/docs/ko/flight_controller/thepeach_r1.md
+++ b/docs/ko/flight_controller/thepeach_r1.md
@@ -14,21 +14,17 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
## 사양
- Main 프로세서: STM32F427VIT6
-
- 32bit ARM Cortex-M4, 168 MHz 256 KB RAM 2 MB Flash memory
- IO 프로세서: STM32F100C8T6
-
- ARM Cortex-M3, 32bit ARM Cortex-M3, 24 MHz, 8KB SRAM
- 내장 센서 :
-
- 가속도/자이로: ICM-20602
- 가속도/자이로스코프/지자기: MPU-9250
- 기압계: MS5611
- 인터페이스
-
- 8+6개의 PWM 출력 (IO 8개, FMU 6개)
- Spektrum DSM / DSM2 / DSM-X Satellite 입력 호환
- Futaba S.BUS 입출력 호환
@@ -42,7 +38,6 @@ It is based on the **Pixhawk-project FMUv3** open hardware design and runs **PX4
- 배터리 하나의 전압 / 전류에 대한 아날로그 입력
- 라즈베리파이 CM3+의 인터페이스
-
- VBUS
- DDR2 커넥터: 라즈베리파이 CM3+
- UART 포트 1개
@@ -103,4 +98,4 @@ make thepeach_r1_default
## 구매처
-Order from [ThePeach](http://thepeach.shop/)
+Order from [ThePeach](https://thepeach.shop/)
diff --git a/docs/ko/flight_modes/offboard.md b/docs/ko/flight_modes/offboard.md
index eee2936229..da73ed20ea 100644
--- a/docs/ko/flight_modes/offboard.md
+++ b/docs/ko/flight_modes/offboard.md
@@ -85,9 +85,7 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
### 콥터
- [px4_msgs::msg::TrajectorySetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/TrajectorySetpoint.msg)
-
- 다음 입력 조합이 지원됩니다.
-
- Position setpoint (`position` different from `NaN`). Non-`NaN` values of velocity and acceleration are used as feedforward terms for the inner loop controllers.
- Velocity setpoint (`velocity` different from `NaN` and `position` set to `NaN`). Non-`NaN` values acceleration are used as feedforward terms for the inner loop controllers.
- Acceleration setpoint (`acceleration` different from `NaN` and `position` and `velocity` set to `NaN`)
@@ -95,18 +93,14 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
- All values are interpreted in NED (Nord, East, Down) coordinate system and the units are \[m\], \[m/s\] and \[m/s^2\] for position, velocity and acceleration, respectively.
- [px4_msgs::msg::VehicleAttitudeSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleAttitudeSetpoint.msg)
-
- The following input combination is supported:
-
- quaternion `q_d` + thrust setpoint `thrust_body`.
Non-`NaN` values of `yaw_sp_move_rate` are used as feedforward terms expressed in Earth frame and in \[rad/s\].
- The quaternion represents the rotation between the drone body FRD (front, right, down) frame and the NED frame. The thrust is in the drone body FRD frame and expressed in normalized \[-1, 1\] values.
- [px4_msgs::msg::VehicleRatesSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleRatesSetpoint.msg)
-
- The following input combination is supported:
-
- `roll`, `pitch`, `yaw` and `thrust_body`.
- All the values are in the drone body FRD frame. The rates are in \[rad/s\] while thrust_body is normalized in \[-1, 1\].
@@ -116,7 +110,6 @@ Before using offboard mode with ROS 2, please spend a few minutes understanding
The following offboard control modes bypass all internal PX4 control loops and should be used with great care.
- [px4_msgs::msg::VehicleThrustSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleThrustSetpoint.msg) + [px4_msgs::msg::VehicleTorqueSetpoint](https://github.com/PX4/PX4-Autopilot/blob/main/msg/VehicleTorqueSetpoint.msg)
-
- The following input combination is supported:
- `xyz` for thrust and `xyz` for torque.
- All the values are in the drone body FRD frame and normalized in \[-1, 1\].
@@ -134,9 +127,7 @@ The following MAVLink messages and their particular fields and field values are
### 멀티콥터/VTOL
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported:
-
- Position setpoint (only `x`, `y`, `z`)
- Velocity setpoint (only `vx`, `vy`, `vz`)
- Acceleration setpoint (only `afx`, `afy`, `afz`)
@@ -146,9 +137,7 @@ The following MAVLink messages and their particular fields and field values are
- PX4 supports the following `coordinate_frame` values (only): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported:
-
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
- Velocity setpoint (only `vx`, `vy`, `vz`)
@@ -172,11 +161,8 @@ The following MAVLink messages and their particular fields and field values are
### Fixed-wing
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported (via `type_mask`):
-
- Position setpoint (`x`, `y`, `z` only; velocity and acceleration setpoints are ignored).
-
- Specify the _type_ of the setpoint in `type_mask` (if these bits are not set the vehicle will fly in a flower-like pattern):
::: info
Some of the _setpoint type_ values below are not part of the MAVLink standard for the `type_mask` field.
@@ -196,11 +182,8 @@ The following MAVLink messages and their particular fields and field values are
- PX4 supports the coordinate frames (`coordinate_frame` field): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported (via `type_mask`):
-
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
-
- Specify the _type_ of the setpoint in `type_mask` (if these bits are not set the vehicle will fly in a flower-like pattern):
::: info
@@ -225,11 +208,8 @@ The following MAVLink messages and their particular fields and field values are
### 탐사선
- [SET_POSITION_TARGET_LOCAL_NED](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_LOCAL_NED)
-
- The following input combinations are supported (in `type_mask`):
-
- Position setpoint (only `x`, `y`, `z`)
-
- Specify the _type_ of the setpoint in `type_mask`:
::: info
@@ -245,13 +225,11 @@ The following MAVLink messages and their particular fields and field values are
- PX4 supports the coordinate frames (`coordinate_frame` field): [MAV_FRAME_LOCAL_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_LOCAL_NED) and [MAV_FRAME_BODY_NED](https://mavlink.io/en/messages/common.html#MAV_FRAME_BODY_NED).
- [SET_POSITION_TARGET_GLOBAL_INT](https://mavlink.io/en/messages/common.html#SET_POSITION_TARGET_GLOBAL_INT)
-
- The following input combinations are supported (in `type_mask`):
- Position setpoint (only `lat_int`, `lon_int`, `alt`)
- Specify the _type_ of the setpoint in `type_mask` (not part of the MAVLink standard).
값들은 다음과 같습니다:
-
- 다음 비트가 설정되지 않으면 정상적인 동작입니다.
- -12288 : Loiter 설정점 (설정점에 매우 가까워지면 기체는 멈춤).
@@ -279,7 +257,7 @@ _Offboard mode_ is affected by the following parameters:
## 개발자 리소스
-Typically developers do not directly work at the MAVLink layer, but instead use a robotics API like [MAVSDK](https://mavsdk.mavlink.io/) or [ROS](http://www.ros.org/) (these provide a developer friendly API, and take care of managing and maintaining connections, sending messages and monitoring responses - the minutiae of working with _Offboard mode_ and MAVLink).
+Typically developers do not directly work at the MAVLink layer, but instead use a robotics API like [MAVSDK](https://mavsdk.mavlink.io/) or [ROS](https://www.ros.org/) (these provide a developer friendly API, and take care of managing and maintaining connections, sending messages and monitoring responses - the minutiae of working with _Offboard mode_ and MAVLink).
The following resources may be useful for a developer audience:
diff --git a/docs/ko/frames_multicopter/dji_f450_cuav_5nano.md b/docs/ko/frames_multicopter/dji_f450_cuav_5nano.md
index eb7984f1db..e147ecb4a8 100644
--- a/docs/ko/frames_multicopter/dji_f450_cuav_5nano.md
+++ b/docs/ko/frames_multicopter/dji_f450_cuav_5nano.md
@@ -43,8 +43,8 @@ FrSky Taranis 조종기를 사용할 수 있습니다.
| DJI F450 밑판 | 1 |
| DJI F450 윗판 | 1 |
| DJI F450 랜딩기어 역할을 하는 다리 | 4 |
-| M3\*8 나사 | 18 |
-| M2 5\*6 나사 | 24 |
+| M3\*8 screws | 18 |
+| M2 5\*6 screws | 24 |
| 벨크로 배터리 스트랩 | 1 |
| DJI Phantom 나사 내장 업그레이드 프로펠러 9.4x5 | 1 |
@@ -163,7 +163,7 @@ FrSky Taranis 조종기를 사용할 수 있습니다.
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/ko/frames_multicopter/dji_f450_cuav_5plus.md b/docs/ko/frames_multicopter/dji_f450_cuav_5plus.md
index e6fe039046..64ed53be20 100644
--- a/docs/ko/frames_multicopter/dji_f450_cuav_5plus.md
+++ b/docs/ko/frames_multicopter/dji_f450_cuav_5plus.md
@@ -43,8 +43,8 @@ FrSky Taranis 조종기를 사용할 수 있습니다.
| DJI F450 밑판 | 1 |
| DJI F450 윗판 | 1 |
| DJI F450 랜딩기어 역할을 하는 다리 | 4 |
-| M3\*8 나사 | 18 |
-| M2 5\*6 나사 | 24 |
+| M3\*8 screws | 18 |
+| M2 5\*6 screws | 24 |
| 벨크로 배터리 스트랩 | 1 |
| DJI Phantom 나사 내장 업그레이드 프로펠러 9.4x5 | 1 |
@@ -166,7 +166,7 @@ FrSky Taranis 조종기를 사용할 수 있습니다.
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/)
+[Download and install](https://qgroundcontrol.com/downloads/)
_QGroundControl_ for your platform.
:::tip
diff --git a/docs/ko/frames_multicopter/holybro_qav250_pixhawk4_mini.md b/docs/ko/frames_multicopter/holybro_qav250_pixhawk4_mini.md
index 7dcd32236e..09c35d2fdf 100644
--- a/docs/ko/frames_multicopter/holybro_qav250_pixhawk4_mini.md
+++ b/docs/ko/frames_multicopter/holybro_qav250_pixhawk4_mini.md
@@ -21,7 +21,7 @@ This topic provides full instructions for building the kit and configuring PX4 u
## 퀵 스타트 가이드
-[Pixhawk 4 Mini QAV250 Kit Quickstart Guide](https://github.com/PX4/PX4-user_guide/raw/main/assets/flight_controller/pixhawk4mini/pixhawk4mini_qav250kit_quickstart_web.pdf)
+[Pixhawk 4 Mini QAV250 Kit Quickstart Guide](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/flight_controller/pixhawk4mini/pixhawk4mini_qav250kit_quickstart_web.pdf)
## 부품 명세서
@@ -40,7 +40,7 @@ The Holybro [QAV250 Kit](https://holybro.com/products/qav250-kit) kits includes
이 조립 예제에서는 다음의 부품들을 사용합니다.
- Receiver: [FrSSKY D4R-II](https://www.frsky-rc.com/product/d4r-ii/)
-- Battery: [4S 1300 mAh](http://www.getfpv.com/lumenier-1300mah-4s-60c-lipo-battery-xt60.html)
+- Battery: [4S 1300 mAh](https://www.getfpv.com/lumenier-1300mah-4s-60c-lipo-battery-xt60.html)
## 하드웨어
@@ -104,26 +104,37 @@ Estimated time to assemble frame is 2 hours and 1.5 hours installing the autopil
1. 그림과 같이 15mm 나사를 사용하여 암을 버튼 플레이트에 부착합니다.

+
2. 짧은 판을 팔 위에 올려 놓습니다.

+
3. 15mm 나사에 너트를 끼웁니다 (다음 단계 참조).
+
4. Insert the plastic screws into the indicated holes (note that this part of the frame faces down when the vehicle is complete).

+
5. Add the plastic nuts to the screws (turn over, as shown)

+
6. Lower the power module over the plastic screws and then add the plastics standoffs

+
7. Put the flight controller plate on the standoffs (over the power module)

+
8. 모터를 부착합니다. 모터에는 회전 방향을 나타내는 화살표가 있습니다.

+
9. Use double sided tape from kit to attach the _Pixhawk 4 Mini_ to the flight controller plate.

+
10. Connect the power module's "power" cable to _Pixhawk 4 mini_.

+
11. Attach the aluminium standoffs to the button plate

+
12. Esc를 모터에 연결합니다. 이 이미지는 모터의 순서와 회전 방향을 나타냅니다.

@@ -136,19 +147,24 @@ Estimated time to assemble frame is 2 hours and 1.5 hours installing the autopil
:::

+
13. 신호 ESC 케이블을 Pixhawk의 PWM 출력에 올바른 순서로 연결합니다 (이전 이미지 참조).

+
14. 수신기 연결합니다.
- PPM 수신기를 사용하는 경우 PPM 포트에 연결하십시오.

+
- SBUS 수신기를 사용하는 경우 RC IN 포트에 연결합니다.

+
15. 텔레메트리 모듈을 연결합니다. 이중 테이프로 모듈을 붙여넣고 텔레메트리 포트에 연결합니다.

+
16. GPS 모듈 연결

@@ -156,6 +172,7 @@ Estimated time to assemble frame is 2 hours and 1.5 hours installing the autopil
제공된 3M 테이프 또는 페이스트를 사용하여 상단 플레이트에 모듈을 부착합니다. 그런 다음 그림과 같이 스탠드오프에 상단 플레이트를 놓습니다.

+
17. 마지막 "필수"조립 단계는 배터리를 고정하기 위해 벨크로를 추가하는 것입니다.

@@ -194,7 +211,7 @@ If you have to wire the system yourself, the diagram below shows all the connect
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the QAV250 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/ko/frames_multicopter/holybro_s500_v2_pixhawk4.md b/docs/ko/frames_multicopter/holybro_s500_v2_pixhawk4.md
index 9e2bafd664..680e9f02d5 100644
--- a/docs/ko/frames_multicopter/holybro_s500_v2_pixhawk4.md
+++ b/docs/ko/frames_multicopter/holybro_s500_v2_pixhawk4.md
@@ -45,8 +45,8 @@ FrSky Taranis 무선 조종기를 사용하여 조립하는 경우를 예시로
| 축거 : 480mm | 1 |
| 암 | 4 |
| 착륙 기어 세트 | 2 |
-| M3\*8 나사 | 18 |
-| M2 5\*6 나사 | 24 |
+| M3\*8 screws | 18 |
+| M2 5\*6 screws | 24 |
| 배터리 혁지 | 1 |
| 프로펠러 1045 (V2 업데이트) | 1 |
@@ -73,8 +73,8 @@ FrSky Taranis 무선 조종기를 사용하여 조립하는 경우를 예시로
| USB 케이블 | 1 |
| 'X'타입 접이식 받침대 마운트 | 1 |
| 70mm & 140mm carbon rod standoff | 2 |
-| 6\*3 2.54mm 피치 수평 핀 | 1 |
-| 8\*3 2.54mm 피치 수평 핀 | 2 |
+| 6\*3 2.54mm pitch Horizontal Pin | 1 |
+| 8\*3 2.54mm pitch Horizontal Pin | 2 |
| 폼 세트 | 1 |
| Pixhawk 4 빠른 시작 가이드 | 1 |
| Pixhawk4 핀아웃 | 1 |
@@ -268,7 +268,7 @@ M3X8 나사 (총 8개, 각 측면에 4개)로 연결합니다.
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the QAV250 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/ko/frames_multicopter/holybro_x500V2_pixhawk5x.md b/docs/ko/frames_multicopter/holybro_x500V2_pixhawk5x.md
index f271b2a7a9..93bc0114f2 100644
--- a/docs/ko/frames_multicopter/holybro_x500V2_pixhawk5x.md
+++ b/docs/ko/frames_multicopter/holybro_x500V2_pixhawk5x.md
@@ -196,7 +196,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/ko/frames_multicopter/holybro_x500_pixhawk4.md b/docs/ko/frames_multicopter/holybro_x500_pixhawk4.md
index 038901f2d9..31247eafa5 100644
--- a/docs/ko/frames_multicopter/holybro_x500_pixhawk4.md
+++ b/docs/ko/frames_multicopter/holybro_x500_pixhawk4.md
@@ -215,7 +215,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/ko/frames_multicopter/holybro_x500v2_pixhawk6c.md b/docs/ko/frames_multicopter/holybro_x500v2_pixhawk6c.md
index 494237b17c..3331f53b37 100644
--- a/docs/ko/frames_multicopter/holybro_x500v2_pixhawk6c.md
+++ b/docs/ko/frames_multicopter/holybro_x500v2_pixhawk6c.md
@@ -15,7 +15,7 @@ This topic provides full instructions for building the [Holybro X500 V2 ARF Kit]
### Payload and Battery Holder
-**Screw**- Sunk Screw M2.5\*6 12pcs
+**Screw**- Sunk Screw M2.5\*6 12pcs
1. Insert the hanger rubber ring gasket in each of their respective hangers.
Do not use sharp objects to press the rubbers inside.
@@ -135,6 +135,7 @@ The following parts can be placed as per usual.
[](https://youtu.be/aiFxVJFjlos)
This guide uses the GPS mount location suggested in Holybro’s guide.
+
2. Screw the GPS mount’s bottom end on the payload holder side using Locknut M3 & Screw M3\*10
[](https://youtu.be/uG5UKy3FrIc)
@@ -170,7 +171,7 @@ Full instructions for installing and configuring PX4 can be found in [Basic Conf
:::
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the X500 frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
First update the firmware, airframe, and actuator mappings:
diff --git a/docs/ko/frames_multicopter/omnicopter.md b/docs/ko/frames_multicopter/omnicopter.md
index e39a0c22ef..1ff5bb0b35 100644
--- a/docs/ko/frames_multicopter/omnicopter.md
+++ b/docs/ko/frames_multicopter/omnicopter.md
@@ -41,7 +41,7 @@ This build follows the original design from [Brescianini, Dario, and Raffaello D
- rods: 12x328mm, 6x465mm
- Screws:
- Motors and standoffs: 40x M3x12mm
- - FC mount: 4x M3x35mm, 4x M3 nuts
+ - FC mount: 4x M3x35mm, 4x M3 nuts
- Standoffs: 4x 40mm
- [3D model](https://cad.onshape.com/documents/eaff30985f1298dc6ce8ce13/w/2f662e604240c4082682e5e3/e/ad2b2245b73393cf369132f7)
@@ -57,10 +57,13 @@ This build follows the original design from [Brescianini, Dario, and Raffaello D
You will notice if it's wrong when the angles of the rods are not correct.
:::
+
- Cut the rods
+
- Test that it all works by connecting the frame pieces together:

+
- Place the motors as far out as possible, without the propellers touching the rods.
### 전자부품
@@ -117,7 +120,7 @@ Make sure the motors do not overheat with the changed settings.
- Parameters:
- Change the desaturation logic for better attitude tracking: set [CA_METHOD](../advanced_config/parameter_reference.md#CA_METHOD) to 0.
- Disable failure detection: set [FD_FAIL_P](../advanced_config/parameter_reference.md#FD_FAIL_P) and [FD_FAIL_R](../advanced_config/parameter_reference.md#FD_FAIL_R) to 0.
-- [This file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/multicopter/omnicopter/omnicopter.params) contains all the relevant parameters.
+- [This file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/multicopter/omnicopter/omnicopter.params) contains all the relevant parameters.
## 비디오
diff --git a/docs/ko/frames_multicopter/qav_r_5_kiss_esc_racer.md b/docs/ko/frames_multicopter/qav_r_5_kiss_esc_racer.md
index 5f7618cefa..4d6015c546 100644
--- a/docs/ko/frames_multicopter/qav_r_5_kiss_esc_racer.md
+++ b/docs/ko/frames_multicopter/qav_r_5_kiss_esc_racer.md
@@ -6,7 +6,7 @@ This topic provides full build and configuration instructions for using the fram
주요 정보:
-- **Frame:** [Lumenier QAV-R 5"](http://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
+- **Frame:** [Lumenier QAV-R 5"](https://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
- **Flight controller:** [Pixracer](../flight_controller/pixracer.md)
@@ -18,24 +18,24 @@ This topic provides full build and configuration instructions for using the fram
### 기체(비행에 필요)
-- Autopilot: [Pixracer](../flight_controller/pixracer.md) from [AUAV](https://store.mrobotics.io/mRo-PixRacer-R14-Official-p/auav-pxrcr-r14-mr.htm) including ESP8266 WiFi- and [ACSP5](https://store.mrobotics.io/product-p/auav-acsp5-mr.htm) power-module
-- Frame: [Lumenier QAV-R 5"](http://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
-- Motors: [Lumenier RX2206-11 2350KV](http://www.getfpv.com/lumenier-rx2206-11-2350kv-motor.html)
-- ESCs: [KISS 24A Race Edition](http://www.getfpv.com/kiss-24a-esc-race-edition-32bit-brushless-motor-ctrl.html)
-- Props: HQProp 5x4.5x3 [CW](http://www.getfpv.com/hqprop-5x4-5x3rg-cw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html) [CCW](http://www.getfpv.com/hqprop-5x4-5x3g-ccw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html)
+- Autopilot: [Pixracer](../flight_controller/pixracer.md) from [AUAV](https://store.mrobotics.io/mRo-PixRacer-R14-Official-p/auav-pxrcr-r14-mr.htm) including ESP8266 WiFi- and [ACSP5](https://store.mrobotics.io/product-p/auav-acsp5-mr.htm) power-module
+- Frame: [Lumenier QAV-R 5"](https://www.getfpv.com/qav-r-fpv-racing-quadcopter-5.html)
+- Motors: [Lumenier RX2206-11 2350KV](https://www.getfpv.com/lumenier-rx2206-11-2350kv-motor.html)
+- ESCs: [KISS 24A Race Edition](https://www.getfpv.com/kiss-24a-esc-race-edition-32bit-brushless-motor-ctrl.html)
+- Props: HQProp 5x4.5x3 [CW](https://www.getfpv.com/hqprop-5x4-5x3rg-cw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html) [CCW](https://www.getfpv.com/hqprop-5x4-5x3g-ccw-propeller-3-blade-2-pack-green-nylon-glass-fiber.html)
- GPS / (외장) Mag.: M8N taken from a [Pixhawk Mini (Discontinued)](../flight_controller/pixhawk_mini.md) set and rewired
-- Battery: [TATTU 1800mAh 4s 75c Lipo](http://www.getfpv.com/tattu-1800mah-4s-75c-lipo-battery.html)
-- RC Receiver: [FrSky X4R-SB](http://www.getfpv.com/frsky-x4r-sb-3-16-channel-receiver-w-sbus.html)
-- RC Transmitter: [FrSky Taranis](http://www.getfpv.com/frsky-taranis-x9d-plus-2-4ghz-accst-radio-w-soft-case-mode-2.html)
-- FC dampening: [O-Rings](http://www.getfpv.com/multipurpose-o-ring-set-of-8.html)
-- GPS Mount: [GPS mast](http://www.getfpv.com/folding-aluminum-gps-mast-for-dji.html)
+- Battery: [TATTU 1800mAh 4s 75c Lipo](https://www.getfpv.com/tattu-1800mah-4s-75c-lipo-battery.html)
+- RC Receiver: [FrSky X4R-SB](https://www.getfpv.com/frsky-x4r-sb-3-16-channel-receiver-w-sbus.html)
+- RC Transmitter: [FrSky Taranis](https://www.getfpv.com/frsky-taranis-x9d-plus-2-4ghz-accst-radio-w-soft-case-mode-2.html)
+- FC dampening: [O-Rings](https://www.getfpv.com/multipurpose-o-ring-set-of-8.html)
+- GPS Mount: [GPS mast](https://www.getfpv.com/folding-aluminum-gps-mast-for-dji.html)
### FPV(선택 사항)
- Camera: [RunCam Swift RR Edition](https://www.getfpv.com/runcam-swift-rotor-riot-special-edition-ir-block-black.html) **includes must-have high quality wide angle lens from GoPro!**
- Video Tx: [ImmersionRC Tramp HV 5.8GHz 600mW](https://www.getfpv.com/immersionrc-tramp-hv-5-8ghz-video-tx-us-version.html) (Discontinued).
-- Video Antennas: [TBS Triumph 5.8GHz CP](http://www.getfpv.com/fpv/antennas/tbs-triumph-5-8ghz-cp-fpv-antenna-3275.html) (SMA port fits ImmercionRC Tx)
-- FPV voltage source plug: [Male JST Battery Pigtail](http://www.getfpv.com/male-jst-battery-pigtail-10cm-10pcs-bag.html)
+- Video Antennas: [TBS Triumph 5.8GHz CP](https://www.getfpv.com/fpv/antennas/tbs-triumph-5-8ghz-cp-fpv-antenna-3275.html) (SMA port fits ImmercionRC Tx)
+- FPV voltage source plug: [Male JST Battery Pigtail](https://www.getfpv.com/male-jst-battery-pigtail-10cm-10pcs-bag.html)
:::info
These parts cover the sending side for standard FPV 5.8GHz analog FM video. 라이브 비디오 스트림을 사용하려면 호환 수신기 및 디스플레이가 필요합니다.
@@ -204,7 +204,7 @@ Sadly the pin assignment was completely wrong and I rewired the connector again
여기에 설명 된 FPV 전송은 비행 컨트롤러와 전자적으로 독립적으로 작동하며, 전원 모듈과 같이 배터리 전압만을 사용합니다.
먼저 모든 것이 올바르게 작동하는지 확인하기 위해 벤치 테스트를 수행하였습니다.
-송신기와 함께 제공되는 비디오 신호 케이블을 FPV 카메라 뒷면과 송신기의 일치하는 플러그에 연결하십시오. 나사를 조인 다음 JST 전원 플러그를 초안 차량이나 다른 전압 소스에 연결하십시오.
+송신기와 함께 제공되는 비디오 신호 케이블을 FPV 카메라 뒷면과 송신기의 일치하는 플러그에 연결하십시오. Screw the Then connect the JST power plug to your draft vehicle or to some other voltage source.
송신기 LED가 켜져야 합니다.
같은 채널에 맞춰진 5.8GHz 수신 장치를 사용하여 비디오를 확인하십시오.
To configure the transmitter to an other channel and adjust the transmission power please refer to the [Tramp HV User Manual](https://www.immersionrc.com/?download=5016).
@@ -225,7 +225,7 @@ To configure the transmitter to an other channel and adjust the transmission pow
## PX4 설정
_QGroundControl_ is used to install the PX4 autopilot and configure/tune it for the frame.
-[Download and install](http://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
+[Download and install](https://qgroundcontrol.com/downloads/) _QGroundControl_ for your platform.
:::tip
Full instructions for installing and configuring PX4 can be found in [Basic Configuration](../config/index.md).
diff --git a/docs/ko/frames_plane/reptile_dragon_2.md b/docs/ko/frames_plane/reptile_dragon_2.md
index 62b7d76a9f..b58284f293 100644
--- a/docs/ko/frames_plane/reptile_dragon_2.md
+++ b/docs/ko/frames_plane/reptile_dragon_2.md
@@ -62,19 +62,19 @@ Key build features
- [DJI FPV Goggles](https://www.dji.com/fpv)
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24)
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24)
- [5V BEC](https://www.readymaderc.com/products/details/rmrc-3a-power-regulator-5-to-6-volt-ubec)
- [6s2p 18650 LiIon flight battery](https://www.upgradeenergytech.com/product-page/6s-22-2v-5600mah-30c-dark-lithium-liion-drone-battery) (select XT60 connector)
-- [Custom designed 3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/rd2_3d_printed_parts.zip)
+- [Custom designed 3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/rd2_3d_printed_parts.zip)
- ARK6X carrier mount
- Holybro Pixhawk 5x carrier mount
- FPV pod and camera mount
- Pitot static probe "plug" adapter
-- [Custom designed power distribution PCB](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/xt30_power_distro_pcb.zip)
+- [Custom designed power distribution PCB](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/xt30_power_distro_pcb.zip)
- Misc hardware: M3 hardware (standoffs, washers, O-rings, bolts), M2.5 nylon standoffs and screws, XT30 connectors, hot glue, heatshrink, Molex Microfit connectors
@@ -377,7 +377,7 @@ make ark_fmu-v6x_default upload
This param file contains the custom PX4 parameter configuration for this build, including radio setup, tuning and sensor config.
Load the file via QGC using the instructions at [Parameters> Tools](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/parameters.html#tools) (QGC User Guide).
-- [Snapshot of PX4 airframe params](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/reptile_dragon_2/reptile_dragon_2_params.params)
+- [Snapshot of PX4 airframe params](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/reptile_dragon_2/reptile_dragon_2_params.params)
You may need to modify some parameters for your build
In particular you should check:
diff --git a/docs/ko/frames_plane/turbo_timber_evolution.md b/docs/ko/frames_plane/turbo_timber_evolution.md
index 557d5af805..e17641f2d1 100644
--- a/docs/ko/frames_plane/turbo_timber_evolution.md
+++ b/docs/ko/frames_plane/turbo_timber_evolution.md
@@ -54,9 +54,9 @@ Key Build Features:
- [DJI FPV Goggles](https://www.dji.com/fpv)
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24)
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24)
-- [Custom designed 3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip)
+- [Custom designed 3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip)
- Pixhawk 4 Mini mount and top GPS mount
- FPV pod and camera mount
- Pitot static pod and wing hardpoint hanger
@@ -117,7 +117,7 @@ After the first flight, the lid was hot glued in place.
## Flight Computer Installation
-A custom mount for the PX4 Mini was designed and 3d printed (see [3D printed parts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip) for all parts).
+A custom mount for the PX4 Mini was designed and 3d printed (see [3D printed parts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/3d_printed_parts.zip) for all parts).
This mount was carefully designed to use internal foam mold features of the stock TTE airframe to be securely attached and well aligned.
The mount consists of two parts in a double-decker configuration, bolted together with M3 threaded standoffs.
The bottom mount carries the Pixhawk and attaches to the airframe while the top mount carries the GPS and ExpressLRS RX.
@@ -238,7 +238,7 @@ I use full flaps on landing to slow the otherwise slippery airframe.
### Parameter File
-[Snapshot of PX4 airframe params](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/fw/turbo_timber_evolution/tteparams.params)
+[Snapshot of PX4 airframe params](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/fw/turbo_timber_evolution/tteparams.params)
This param file contains the custom PX4 parameter config for this build, including radio setup, tuning and sensor config.
The param file can be loaded via QGC using the instructions at [Parameters> Tools ](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/parameters.html#tools) (QGC User Guide).
diff --git a/docs/ko/frames_rover/rover_position_control.md b/docs/ko/frames_rover/rover_position_control.md
index 053ee7d62d..6d01e16082 100644
--- a/docs/ko/frames_rover/rover_position_control.md
+++ b/docs/ko/frames_rover/rover_position_control.md
@@ -110,8 +110,8 @@ The idea was to develop a platform that allows for easy control of wheeled UGVs
- [Pixhawk Mini (Discontinued)](../flight_controller/pixhawk_mini.md)
- 3DR 10S 전원 모듈
- 3DR 433MHz Telemetry Module (EU)
-- [Spektrum Dxe Controller](http://www.spektrumrc.com/Products/Default.aspx?ProdId=SPM1000) or other PX4-compatible remotes
-- [Spektrum Quad Race Serial Receiver w/Diversity](http://www.spektrumrc.com/Products/Default.aspx?ProdID=SPM4648)
+- [Spektrum Dxe Controller](https://www.spektrumrc.com/product/dxe-dsmx-transmitter-with-ar610/SPM1000.html) or other PX4-compatible remotes
+- [Spektrum Quad Race Serial Receiver w/Diversity](https://www.spektrumrc.com/product/dsmx-quad-race-serial-receiver-with-diversity/SPM4648.html)
- [PX4Flow](../sensor/px4flow.md) (Deprecated)
### 조립
@@ -133,7 +133,7 @@ Tests showed that a better vibration insulation should be used, especially for t
For this particular mounting we chose to use the clip supplied with the rover to attach the upper plate.
For this, two supports were 3D printed.
-The CAD files are provided [here](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/rover/traxxas_stampede_vxl/plane_holders.zip).
+The CAD files are provided [here](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/rover/traxxas_stampede_vxl/plane_holders.zip).
:::warning
It is **HIGHLY RECOMMENDED** to set the ESC in training mode (see Traxxas Stampede Manual), which reduces power to 50%.
diff --git a/docs/ko/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md b/docs/ko/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
index b0fd3921e7..8405164f3a 100644
--- a/docs/ko/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
+++ b/docs/ko/frames_vtol/vtol_quadplane_falcon_vertigo_hybrid_rtf_dropix.md
@@ -28,9 +28,9 @@ RTF 키트에는 RC 수신기와 텔레메트리를 제외하고, 시스템에
- GPS u-blox M8N
- 전원 센서:
- [Airspeed Sensor](https://store-drotek.com/793-digital-differential-airspeed-sensor-kit-.html)
-- Quad power set [Tiger Motor MT-2216-11 900kv V2](https://www.getfpv.com/tiger-motor-mt-2216-11-900kv-v2.html) (discontinued)
+- Quad power set [Tiger Motor MT-2216-11 900kv V2](https://www.getfpv.com/tiger-motor-mt-2216-11-900kv-v2.html) (discontinued)
- 4 x 프로펠러 10”x 5”(쿼드 모터)
-- 4 x [ESC 25A](http://www.getfpv.com/tiger-motor-flame-25a-esc.html)
+- 4 x [ESC 25A](https://www.getfpv.com/tiger-motor-flame-25a-esc.html)
- 프로펠러 10”x 5”1 개 (푸셔 모터)
- 1 x ESC 30A
- 푸셔 모터 전원 시스템
@@ -255,7 +255,6 @@ GPS / 나침반 모듈은 기본 방향으로 날개에 이미 장착되어 있
:::
2. 차량이 예상 무게 중심 주변에서 균형을 이루는 지 확인하십시오.
-
- 손가락으로 기체의 무게 중심을 잡고 차량이 안정적인지 확인하십시오.

diff --git a/docs/ko/frames_vtol/vtol_quadplane_foxtech_loong_2160.md b/docs/ko/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
index 8a0e3359bb..93dc9fa2e8 100644
--- a/docs/ko/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
+++ b/docs/ko/frames_vtol/vtol_quadplane_foxtech_loong_2160.md
@@ -51,7 +51,7 @@ The following options have been tested:
- [Groundstation and Radio link](https://holybro.com/collections/rc-radio-transmitter-receiver/products/skydroid-h12?variant=42940989931709)
- [USB-C extension cable](https://www.digitec.ch/en/s1/product/powerguard-usb-c-usb-c-025-m-usb-cables-22529949?dbq=1&gclid=Cj0KCQjw2cWgBhDYARIsALggUhrh-z-7DSU0wKfLBVa8filkXLQaxUpi7pC0ffQyRzLng8Ph01h2R1gaAp0mEALw_wcB&gclsrc=aw.ds)
- [I2C Splitter](https://www.3dxr.co.uk/autopilots-c2/the-cube-aka-pixhawk-2-1-c9/cube-cables-accessories-sensors-c15/cubepilot-i2c-can-splitter-jst-gh-4pin-p2840)
-- [3D-Printed mounts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong-3d-prints.zip)
+- [3D-Printed mounts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong-3d-prints.zip)
- 1x Baseplate
- 1x Stack-fixture
- 1x Fan-Mount
@@ -291,12 +291,12 @@ If you wish connect the actuators to different outputs you will need to modify t
### Load Parameters File
-Next we load a [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
+Next we load a [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
If you have followed the wiring instructions for the motors you probably won't need to do much further configuration other than sensor calibration and fixing the trims.
To load the file:
-1. Download the [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/foxtech_loong_2160/loong.params).
+1. Download the [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/foxtech_loong_2160/loong.params).
2. Select the [Parameters](../advanced_config/parameters.md#finding-updating-parameters) tab and then click on **Tools** in the top right corner.
3. Select **Load from file** and then choose the `loong.params` file you just downloaded.
4. 기체를 재부팅합니다.
diff --git a/docs/ko/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md b/docs/ko/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
index 54059d246b..7cb8848371 100644
--- a/docs/ko/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
+++ b/docs/ko/frames_vtol/vtol_tailsitter_caipiroshka_pixracer.md
@@ -13,7 +13,7 @@ These instructions _should_ work with the updated vehicle: [TBS Caipirinha 2](ht
## 부품 목록
- TBS Caipirinha Wing (no longer available - try [TBS Caipirinha 2](https://team-blacksheep.com/products/prod:tbs_caipi2_pnp))
-- Left and right 3D-printed motor mount (design files)
+- Left and right 3D-printed motor mount (design files)
- CW 8045 propeller ([Eflight store](https://www.banggood.com/GEMFAN-Carbon-Nylon-8045-CWCCW-Propeller-For-Quadcopters-1-Pair-p-950874.html))
- CCW 8045 propeller ([Eflight store](https://www.banggood.com/GEMFAN-Carbon-Nylon-8045-CWCCW-Propeller-For-Quadcopters-1-Pair-p-950874.html))
- 2x 1800 kV 120-180W 모터
diff --git a/docs/ko/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md b/docs/ko/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
index a1c0c5d883..5cab5bacce 100644
--- a/docs/ko/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
+++ b/docs/ko/frames_vtol/vtol_tiltrotor_omp_hobby_zmo_fpv.md
@@ -47,12 +47,12 @@ The approximate maximum size of the FC is: 50x110x22mm
- [Airspeed sensor (cheaper alternative)](https://holybro.com/products/digital-air-speed-sensor?pr_prod_strat=use_description&pr_rec_id=236dfda00&pr_rec_pid=7150470561981&pr_ref_pid=7150472462525&pr_seq=uniform)
- [Lidar Lightware lw20-c (included in Skynode eval. kit)](../sensor/sfxx_lidar.md) (Optional)
- [Lidar Seeed Studio PSK-CM8JL65-CC5 (cheaper alternative)](https://www.seeedstudio.com/PSK-CM8JL65-CC5-Infrared-Distance-Measuring-Sensor-p-4028.html) (Optional)
-- [5V BEC](http://www.mateksys.com/?portfolio=bec12s-pro)
+- [5V BEC](https://www.mateksys.com/?portfolio=bec12s-pro)
- [Radio (RC) System](../getting_started/rc_transmitter_receiver.md) of your preference
- [Servo cable extension cable male 30cm 10 pcs](https://www.getfpv.com/male-to-male-servo-extension-cable-twisted-22awg-jr-style-5-pcs.html)
- [USB-C extension cable](https://www.digitec.ch/en/s1/product/powerguard-usb-c-usb-c-025-m-usb-cables-22529949?dbq=1&gclid=Cj0KCQjw2cWgBhDYARIsALggUhrh-z-7DSU0wKfLBVa8filkXLQaxUpi7pC0ffQyRzLng8Ph01h2R1gaAp0mEALw_wcB&gclsrc=aw.ds)
- [3M VHB tape](https://www.amazon.in/3M-VHB-Tape-4910-Length/dp/B00GTABM3Y)
-- [3D-Printed mounts](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo_3d_prints.zip)
+- [3D-Printed mounts](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo_3d_prints.zip)
- 2x wing connector mount
- 1x Airspeed sensor mount
- 1x GPS-Mount
@@ -159,7 +159,6 @@ The connector glued into the fuselage. Make sure to properly align the connector
If you own a crimp tool, then you can also directly add the connectors without soldering.
2. Plug the servo cables into the adapter IO board in the following order:
-
- 1 - Aileron left
- 2 - Aileron right
- 3 - V-Tail left
@@ -168,7 +167,6 @@ The connector glued into the fuselage. Make sure to properly align the connector
- 6 - Tilt right
3. Plug in the motor signal cables into the FMU adapter board in the following order:
-
- 1 - Front left
- 2 - Front right
- 3 - Rear
@@ -281,12 +279,12 @@ An inexpensive example would be a [SiK Telemetry Radio](../telemetry/sik_radio.m
### Load Parameters File
-Next we load a [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
+Next we load a [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params) that contains parameters that define the frame geometry, output mappings, and tuning values — so you don't have to!
If you have followed the wiring instructions for the motors you probably won't need to do much further configuration other than sensor calibration and fixing the trims.
To load the file:
-1. Download the [parameter file](https://github.com/PX4/PX4-user_guide/raw/main/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params).
+1. Download the [parameter file](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/airframes/vtol/omp_hobby_zmo_fpv/omp_hobby_zmo.params).
2. Select the [Parameters](../advanced_config/parameters.md#finding-updating-parameters) tab and then click on **Tools** in the top right corner.
3. Select **Load from file** and then choose the `omp_hobby_zmo.params` file you just downloaded.
4. 기체를 재부팅합니다.
diff --git a/docs/ko/getting_started/flight_reporting.md b/docs/ko/getting_started/flight_reporting.md
index 9c0408f588..1cce986830 100644
--- a/docs/ko/getting_started/flight_reporting.md
+++ b/docs/ko/getting_started/flight_reporting.md
@@ -9,7 +9,7 @@ Keeping flight logs is a legal requirement in some jurisdictions.
## 비행 콘트롤러에서 로그 다운로드
-Logs can be downloaded using [QGroundControl](http://qgroundcontrol.com/): **[Analyze View > Log Download](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/analyze_view/log_download.html)**.
+Logs can be downloaded using [QGroundControl](https://qgroundcontrol.com/): **[Analyze View > Log Download](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/analyze_view/log_download.html)**.

@@ -21,7 +21,7 @@ You can also host a [private Flight Review server](../dev_log/log_encryption.md#
## 로그 분석
-Upload the log file to the online [Flight Review](http://logs.px4.io) tool.
+Upload the log file to the online [Flight Review](https://logs.px4.io/) tool.
After upload you'll be emailed a link to the analysis page for the log.
[Log Analysis using Flight Review](../log/flight_review.md) explains how to interpret the plots, and can help you to verify/reject the causes of common problems: excessive vibration, poor PID tuning, saturated controllers, imbalanced vehicles, GPS noise, etc.
@@ -38,17 +38,17 @@ For more information see [Settings > MAVLink Settings > MAVLink 2 Logging (PX4 o
## PX4 개발자가 검토할 로그 파일 공유
-The [Flight Review](http://logs.px4.io) log file link can be shared for discussion in the [support forums](../contribute/support.md#forums-and-chat) or a [Github issue](../index.md#reporting-bugs-issues).
+The [Flight Review](https://logs.px4.io/) log file link can be shared for discussion in the [support forums](../contribute/support.md#forums-and-chat) or a [Github issue](../index.md#reporting-bugs-issues).
## 로그 설정
-The logging system is configured by default to collect sensible logs for use with [Flight Review](http://logs.px4.io).
+The logging system is configured by default to collect sensible logs for use with [Flight Review](https://logs.px4.io/).
Logging may further be configured using the [SD Logging](../advanced_config/parameter_reference.md#sd-logging) parameters or with a file on the SD card.
Details on configuration can be found in the [logging configuration documentation](../dev_log/logging.md#configuration).
## 주요 링크
-- [Flight Review](http://logs.px4.io)
+- [Flight Review](https://logs.px4.io/)
- [Log Analysis using Flight Review](../log/flight_review.md)
- [Flight Log Analysis](../dev_log/flight_log_analysis.md)
diff --git a/docs/ko/getting_started/px4_basic_concepts.md b/docs/ko/getting_started/px4_basic_concepts.md
index eedaa753c3..663de0e58e 100644
--- a/docs/ko/getting_started/px4_basic_concepts.md
+++ b/docs/ko/getting_started/px4_basic_concepts.md
@@ -62,9 +62,9 @@ PX4의 주요 특징들은 아래와 같습니다.
- Supports many different vehicle frames/types, including: [multicopters](../frames_multicopter/index.md), [fixed-wing aircraft](../frames_plane/index.md) (planes), [VTOLs](../frames_vtol/index.md) (hybrid multicopter/fixed-wing), [ground vehicles](../frames_rover/index.md), and [underwater vehicles](../frames_sub/index.md).
- Great choice of drone components for [flight controller](#flight-controller), [sensors](#sensors), [payloads](#payloads), and other peripherals.
- Flexible and powerful [flight modes](#flight-modes) and [safety features](#safety-settings-failsafe).
-- Robust and deep integration with [companion computers](#offboard-companion-computer) and [robotics APIs](../robotics/index.md) such as [ROS 2](../ros2/user_guide.md) and [MAVSDK](http://mavsdk.mavlink.io).
+- Robust and deep integration with [companion computers](#offboard-companion-computer) and [robotics APIs](../robotics/index.md) such as [ROS 2](../ros2/user_guide.md) and [MAVSDK](https://mavsdk.mavlink.io/main/en/index.html).
-PX4 is a core part of a broader drone platform that includes the [QGroundControl](#qgc) ground station, [Pixhawk hardware](https://pixhawk.org/), and [MAVSDK](http://mavsdk.mavlink.io) for integration with companion computers, cameras and other hardware using the MAVLink protocol.
+PX4 is a core part of a broader drone platform that includes the [QGroundControl](#qgc) ground station, [Pixhawk hardware](https://pixhawk.org/), and [MAVSDK](https://mavsdk.mavlink.io/main/en/index.html) for integration with companion computers, cameras and other hardware using the MAVLink protocol.
PX4 is supported by the [Dronecode Project](https://www.dronecode.org/).
## Ground Control Stations
@@ -74,9 +74,9 @@ A subset of the products that are known to work with PX4 are listed below.
### QGroundControl {#qgc}
-The Dronecode GCS software is called [QGroundControl](http://qgroundcontrol.com/) ("QGC").
+The Dronecode GCS software is called [QGroundControl](https://qgroundcontrol.com/) ("QGC").
It runs on Windows, Android, MacOS or Linux hardware, and supports a wide range of screen form factors.
-You can download it (for free) from [here](http://qgroundcontrol.com/downloads/).
+You can download it (for free) from [here](https://qgroundcontrol.com/downloads/).

diff --git a/docs/ko/getting_started/rc_transmitter_receiver.md b/docs/ko/getting_started/rc_transmitter_receiver.md
index 5480a1019b..071945f2d7 100644
--- a/docs/ko/getting_started/rc_transmitter_receiver.md
+++ b/docs/ko/getting_started/rc_transmitter_receiver.md
@@ -99,7 +99,6 @@ _PX4_ and _Pixhawk_ have been validated with:
- PPM sum receivers
- S.BUS and S.BUS2 receivers from:
-
- Futaba
- FrSky S.BUS and PPM models
- TBS Crossfire with SBUS as output protocol
@@ -131,7 +130,7 @@ The receivers we have tested all now appear to be compatible, but it is possible
- Graupner HoTT receivers: SUMD output must connect to a **SPKT/DSM** input (as above).
- PPM-Sum and S.BUS receivers must connect directly to the **RC** ground, power and signal pins.
This is typically labeled: `RC IN`, `RCIN` or `RC`, but has in some FCs has been labeled `PPM RC` or `PPM`.
-- PPM receivers that have an individual wire for each channel must connect to the RCIN channel _via_ a PPM encoder [like this one](http://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
+- PPM receivers that have an individual wire for each channel must connect to the RCIN channel _via_ a PPM encoder [like this one](https://www.getfpv.com/radios/radio-accessories/holybro-ppm-encoder-module.html) (PPM-Sum receivers use a single signal wire for all channels).
- TBS Crossfire/Express LRS Receivers using [CRSF Telemetry](../telemetry/crsf_telemetry.md) connect via a spare UART.
Flight controllers usually include appropriate cables for connecting common receiver types.
diff --git a/docs/ko/gps_compass/gps_hex_here2.md b/docs/ko/gps_compass/gps_hex_here2.md
index 86e4f64a57..d461e7b0c4 100644
--- a/docs/ko/gps_compass/gps_hex_here2.md
+++ b/docs/ko/gps_compass/gps_hex_here2.md
@@ -4,7 +4,7 @@
This has been superseded by the [Cube Here 3](https://www.cubepilot.com/#/here/here3)
:::
-The [Here2 GPS receiver](http://www.proficnc.com/all-products/152-gps-module.html) is an update to the Here GPS module from HEX.
+The _Here2 GPS receiver_ is an update to the Here GPS module from HEX.
주요 특징은 다음과 같습니다.
@@ -18,8 +18,7 @@ The [Here2 GPS receiver](http://www.proficnc.com/all-products/152-gps-module.htm
## 구매처
-- [ProfiCNC](http://www.proficnc.com/all-products/152-gps-module.html) (Australia)
-- [Other resellers](http://www.proficnc.com/stores)
+- [Resellers](https://www.cubepilot.com/#/reseller/list)
## 설정
@@ -34,7 +33,7 @@ PX4의 설정과 사용법은 대부분 플러그앤플레이입니다.
## 배선
-The Here2 GPS comes with an 8 pin connector that can be inserted directly into the [Pixhawk 2](http://www.hex.aero/wp-content/uploads/2016/07/DRS_Pixhawk-2-17th-march-2016.pdf) GPS UART port.
+The Here2 GPS comes with an 8 pin connector that can be inserted directly into the Pixhawk 2 `GPS` UART port.
Pixhawk 3 Pro와 Pixracer에는 6 핀 GPS 포트 커넥터가 있습니다.
이러한 컨트롤러에서는 GPS 케이블 (아래 그림 참조)을 수정하여 핀 6과 7을 제거할 수 있습니다.
diff --git a/docs/ko/gps_compass/index.md b/docs/ko/gps_compass/index.md
index 95aaf16b75..13aa607cc1 100644
--- a/docs/ko/gps_compass/index.md
+++ b/docs/ko/gps_compass/index.md
@@ -47,7 +47,7 @@ These have been tested by the PX4 dev team, or which are popular within the PX4
| [mRo GPS u-blox Neo-M8N Dual Compass][mro_neo8mn_dual_mag] | M8N | LIS3MDL, IST8308 | | ✘ | |
| [RaccoonLab L1 GNSS NEO-M8N][RccnLabGNSS250] | NEO-M8N | RM3100 | ✓ | ✘✘✓ | + Baro |
| [Sky-Drones SmartAP GPS](../gps_compass/gps_smartap.md) | M8N | HMC5983, IST8310, LIS3MDL | | ✓ | + Baro |
-| [Zubax GNSS 2](https://zubax.com/products/gnss_2) | MAX-M8Q | LIS3MDL | | ✘ | + Baro |
+| [Zubax GNSS 2](https://shop.zubax.com/products/zubax-gnss-2) | MAX-M8Q | LIS3MDL | | ✘ | + Baro |
@@ -145,7 +145,6 @@ To ensure the port is set up correctly perform a [Serial Port Configuration](../
The following steps show how to configure a secondary GPS on the `GPS 2` port in _QGroundControl_:
1. [Find and set](../advanced_config/parameters.md) the parameter [GPS_2_CONFIG](../advanced_config/parameter_reference.md#GPS_2_CONFIG) to **GPS 2**.
-
- Open _QGroundControl_ and navigate to the **Vehicle Setup > Parameters** section.
- Select the **GPS** tab, then open the [GPS_2_CONFIG](../advanced_config/parameter_reference.md#GPS_2_CONFIG) parameter and select `GPS 2` from the dropdown list.
diff --git a/docs/ko/gps_compass/rtk_gps.md b/docs/ko/gps_compass/rtk_gps.md
index 78d1cbd270..1d40ffce20 100644
--- a/docs/ko/gps_compass/rtk_gps.md
+++ b/docs/ko/gps_compass/rtk_gps.md
@@ -14,47 +14,48 @@ Some RTK GNSS setups can provide yaw/heading information, as an alternative to t
## 지원되는 RTK 장치
-PX4 supports the [u-blox M8P](https://www.u-blox.com/en/product/neo-m8p), [u-blox F9P](https://www.u-blox.com/en/product/zed-f9p-module) and the [Trimble MB-Two](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) GPS, and products that incorporate them.
+PX4 supports the [u-blox M8P](https://www.u-blox.com/en/product/neo-m8p), [u-blox F9P](https://www.u-blox.com/en/product/zed-f9p-module) and the [Trimble MB-Two](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) GPS, and products that incorporate them.
:::note
일부 RTK 모듈은 특정 기능(베이스 또는 로버)으로만 사용할 수 있는 반면, 다른 모듈은 서로 교환하여 사용할 수 있습니다.
The table indicates devices that also output yaw, and that can provide yaw when two on-vehicle units are used.
It also highlights devices that connect via the CAN bus, and those which support PPK (Post-Processing Kinematic).
-| 장치 | GPS | 나침반 | [DroneCAN](../dronecan/index.md) | [GPS Yaw](#configuring-gps-as-yaw-heading-source) | PPK |
-| :------------------------------------------------------------------------------------------------------------------- | :------------------: | :------: | :------------------------------: | :-----------------------------------------------: | :-: |
-| [ARK RTK GPS](../dronecan/ark_rtk_gps.md) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
-| [ARK MOSAIC-X5 RTK GPS](../dronecan/ark_mosaic__rtk_gps.md) | Mosaic-X5 | IIS2MDC | ✓ | [Septentrio Dual Antenna][SeptDualAnt] | |
-| [CUAV C-RTK GPS](../gps_compass/rtk_gps_cuav_c-rtk.md) | M8P/M8N | ✓ | | | |
-| [CUAV C-RTK2](../gps_compass/rtk_gps_cuav_c-rtk2.md) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [CUAV C-RTK 9Ps GPS](../gps_compass/rtk_gps_cuav_c-rtk-9ps.md) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [CUAV C-RTK2 PPK/RTK GNSS](../gps_compass/rtk_gps_cuav_c-rtk.md) | F9P | RM3100 | | | ✓ |
-| [CubePilot Here+ RTK GPS](../gps_compass/rtk_gps_hex_hereplus.md) | M8P | HMC5983 | | | |
-| [CubePilot Here3 CAN GNSS GPS (M8N)](https://www.cubepilot.org/#/here/here3) | M8P | ICM20948 | ✓ | | |
-| [Drotek SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [DATAGNSS GEM1305 RTK Receiver][DATAGNSS GEM1305 RTK] | TAU951M | ✘ | | ✘ | |
-| [Femtones MINI2 Receiver](../gps_compass/rtk_gps_fem_mini2.md) | FB672, FB6A0 | ✓ | | | |
-| [Freefly RTK GPS](../gps_compass/rtk_gps_freefly.md) | F9P | IST8310 | | | |
-| [Holybro H-RTK ZED-F9P RTK Rover (DroneCAN variant)](../dronecan/holybro_h_rtk_zed_f9p_gps.md) | F9P | RM3100 | ✓ | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK ZED-F9P RTK Rover](https://holybro.com/collections/h-rtk-gps/products/h-rtk-zed-f9p-rover) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Ultralight](https://holybro.com/products/h-rtk-f9p-ultralight) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Helical or Base](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
-| [Holybro DroneCAN H-RTK F9P Helical](https://holybro.com/products/dronecan-h-rtk-f9p-helical) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK F9P Rover Lite](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | | |
-| [Holybro DroneCAN H-RTK F9P Rover](https://holybro.com/products/dronecan-h-rtk-f9p-rover) | F9P | BMM150 | | [Dual F9P][DualF9P] | |
-| [Holybro H-RTK M8P GNSS](../gps_compass/rtk_gps_holybro_h-rtk-m8p.md) | M8P | IST8310 | | | |
-| [Holybro H-RTK Unicore UM982 GPS](../gps_compass/rtk_gps_holybro_unicore_um982.md) | UM982 | IST8310 | | [Unicore Dual Antenna][UnicoreDualAnt] | |
-| [LOCOSYS Hawk R1](../gps_compass/rtk_gps_locosys_r1.md) | MC-1612-V2b | | | | |
-| [LOCOSYS Hawk R2](../gps_compass/rtk_gps_locosys_r2.md) | MC-1612-V2b | IST8310 | | | |
-| [mRo u-blox ZED-F9 RTK L1/L2 GPS](https://store.mrobotics.io/product-p/m10020d.htm) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [Navisys L1/L2 ZED-F9P RTK - Base only](https://www.navisys.com.tw/productdetail?name=GR901&class=RTK) | F9P | | | | |
-| [RaccoonLab L1/L2 ZED-F9P][RaccoonLab L1/L2 ZED-F9P] | F9P | RM3100 | ✓ | | |
-| [RaccoonLab L1/L2 ZED-F9P with external antenna][RaccnLabL1L2ZED-F9P ext_ant] | F9P | RM3100 | ✓ | | |
-| [Septentrio AsteRx-m3 Pro](../gps_compass/septentrio_asterx-rib.md) | AsteRx | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
-| [Septentrio mosaic-go](../gps_compass/septentrio_mosaic-go.md) | mosaic X5 / mosaic H | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
-| [SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [SparkFun GPS-RTK2 Board - ZED-F9P](https://www.sparkfun.com/products/15136) | F9P | ✓ | | [Dual F9P][DualF9P] | |
-| [Trimble MB-Two](../gps_compass/rtk_gps_trimble_mb_two.md) | F9P | ✓ | | ✓ | |
+| 장치 | GPS | 나침반 | [DroneCAN](../dronecan/index.md) | [GPS Yaw](#configuring-gps-as-yaw-heading-source) | PPK |
+| :------------------------------------------------------------------------------------------------------------------- | :---------------------------------------------------------: | :------: | :------------------------------: | :-----------------------------------------------: | :-: |
+| [ARK RTK GPS](../dronecan/ark_rtk_gps.md) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
+| [ARK MOSAIC-X5 RTK GPS](../dronecan/ark_mosaic__rtk_gps.md) | Mosaic-X5 | IIS2MDC | ✓ | [Septentrio Dual Antenna][SeptDualAnt] | |
+| [CUAV C-RTK GPS](../gps_compass/rtk_gps_cuav_c-rtk.md) | M8P/M8N | ✓ | | | |
+| [CUAV C-RTK2](../gps_compass/rtk_gps_cuav_c-rtk2.md) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [CUAV C-RTK 9Ps GPS](../gps_compass/rtk_gps_cuav_c-rtk-9ps.md) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [CUAV C-RTK2 PPK/RTK GNSS](../gps_compass/rtk_gps_cuav_c-rtk.md) | F9P | RM3100 | | | ✓ |
+| [CubePilot Here+ RTK GPS](../gps_compass/rtk_gps_hex_hereplus.md) | M8P | HMC5983 | | | |
+| [CubePilot Here3 CAN GNSS GPS (M8N)](https://www.cubepilot.org/#/here/here3) | M8P | ICM20948 | ✓ | | |
+| [Drotek SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [DATAGNSS NANO HRTK Receiver](../gps_compass/rtk_gps_datagnss_nano_hrtk.md) | [D10P](https://docs.datagnss.com/gnss/gnss_module/D10P_RTK) | IST8310 | | ✘ | |
+| [DATAGNSS GEM1305 RTK Receiver](../gps_compass/rtk_gps_gem1305.md) | TAU951M | IST8310 | | ✘ | |
+| [Femtones MINI2 Receiver](../gps_compass/rtk_gps_fem_mini2.md) | FB672, FB6A0 | ✓ | | | |
+| [Freefly RTK GPS](../gps_compass/rtk_gps_freefly.md) | F9P | IST8310 | | | |
+| [Holybro H-RTK ZED-F9P RTK Rover (DroneCAN variant)](../dronecan/holybro_h_rtk_zed_f9p_gps.md) | F9P | RM3100 | ✓ | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK ZED-F9P RTK Rover](https://holybro.com/collections/h-rtk-gps/products/h-rtk-zed-f9p-rover) | F9P | RM3100 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Ultralight](https://holybro.com/products/h-rtk-f9p-ultralight) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Helical or Base](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | [Dual F9P][DualF9P] | |
+| [Holybro DroneCAN H-RTK F9P Helical](https://holybro.com/products/dronecan-h-rtk-f9p-helical) | F9P | BMM150 | ✓ | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK F9P Rover Lite](../gps_compass/rtk_gps_holybro_h-rtk-f9p.md) | F9P | IST8310 | | | |
+| [Holybro DroneCAN H-RTK F9P Rover](https://holybro.com/products/dronecan-h-rtk-f9p-rover) | F9P | BMM150 | | [Dual F9P][DualF9P] | |
+| [Holybro H-RTK M8P GNSS](../gps_compass/rtk_gps_holybro_h-rtk-m8p.md) | M8P | IST8310 | | | |
+| [Holybro H-RTK Unicore UM982 GPS](../gps_compass/rtk_gps_holybro_unicore_um982.md) | UM982 | IST8310 | | [Unicore Dual Antenna][UnicoreDualAnt] | |
+| [LOCOSYS Hawk R1](../gps_compass/rtk_gps_locosys_r1.md) | MC-1612-V2b | | | | |
+| [LOCOSYS Hawk R2](../gps_compass/rtk_gps_locosys_r2.md) | MC-1612-V2b | IST8310 | | | |
+| [mRo u-blox ZED-F9 RTK L1/L2 GPS](https://store.mrobotics.io/product-p/m10020d.htm) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [Navisys L1/L2 ZED-F9P RTK - Base only](https://www.navisys.com.tw/productdetail?name=GR901&class=RTK) | F9P | | | | |
+| [RaccoonLab L1/L2 ZED-F9P][RaccoonLab L1/L2 ZED-F9P] | F9P | RM3100 | ✓ | | |
+| [RaccoonLab L1/L2 ZED-F9P with external antenna][RaccnLabL1L2ZED-F9P ext_ant] | F9P | RM3100 | ✓ | | |
+| [Septentrio AsteRx-m3 Pro](../gps_compass/septentrio_asterx-rib.md) | AsteRx | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
+| [Septentrio mosaic-go](../gps_compass/septentrio_mosaic-go.md) | mosaic X5 / mosaic H | ✓ | | [Septentrio Dual Antenna][SeptDualAnt] | ✓ |
+| [SIRIUS RTK GNSS ROVER (F9P)](https://store-drotek.com/911-sirius-rtk-gnss-rover-f9p.html) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [SparkFun GPS-RTK2 Board - ZED-F9P](https://www.sparkfun.com/products/15136) | F9P | ✓ | | [Dual F9P][DualF9P] | |
+| [Trimble MB-Two](../gps_compass/rtk_gps_trimble_mb_two.md) | F9P | ✓ | | ✓ | |
@@ -143,7 +144,6 @@ RTK GPS 연결은 기본적으로 플러그앤플레이입니다.

4. Survey-in이 완료되면 :
-
- The RTK GPS icon changes to white and _QGroundControl_ starts to stream position data to the vehicle:

diff --git a/docs/ko/gps_compass/rtk_gps_datagnss_nano_hrtk.md b/docs/ko/gps_compass/rtk_gps_datagnss_nano_hrtk.md
new file mode 100644
index 0000000000..4db5b0567e
--- /dev/null
+++ b/docs/ko/gps_compass/rtk_gps_datagnss_nano_hrtk.md
@@ -0,0 +1,123 @@
+# DATAGNSS NANO HRTK receiver
+
+NANO HRTK receiver is a RTK receiver designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
+
+It is a high performance dual-band RTK receiver with compass, which is based on CYNOSURE series chipset.
+It supports global civil navigation systems, including GPS, BDS, GLONASS, Galileo, QZSS, and SBAS.
+
+NANO HRTK receiver support compass.
+It is designed for UAV, RTK, and other applications.
+
+
+
+:::info
+The NANO HRTK Receiver supports both base and rover options.
+It does not yet support _moving base_ mode.
+:::
+
+## 구매처
+
+- [NANO HRTK receiver](https://www.datagnss.com/collections/gnss-for-drone/products/nano-helix-rtk-receiver) (www.datagnss.com)
+
+## 주요 특징
+
+- Full constellation, multi-frequency GNSS satellite receiver
+- Support RTK with up to 10hz output rate
+- Standard UART serial interface
+- Lightweight and compact size
+
+## Frequencies
+
+- GPS/QZSS: L1 C/A, L5C
+- GLONASS: L1OF
+- BEIDOU: B1I, B2a
+- GALILEO: E1, E5a
+- IRNSS: L5
+
+## GNSS
+
+- 128 hardware channels
+- 3D accuracy: **1.5m** CEP
+- RTK accuracy: **2cm** +1PPM(H), 3cm+1PPM(V)
+
+## 인터페이스
+
+- UART \*2 : 230400bps default
+- SMA connector for antenna
+- Output rate 5Hz default, up to 10Hz
+- Main power supply: 4.7~5.2V
+
+## Protocol
+
+- NMEA-0183 output
+- RTCM3.x input/output
+
+## Environment
+
+- Operating temp. -20~85°C
+
+## Dimension and Weight
+
+- 35x30mm
+- 25g
+
+## 핀배열
+
+The board is connected to the autopilot via UART interface.
+
+
+
+The 1.25mm pitch 6P connector supports UART for GNSS and I2C for compass.
+
+
+
+## 하드웨어 설정
+
+RTK requires a base RTK module attached to the ground station, and a rover RTK module on the vehicle.
+The data from the base needs to be transmitted to the drone via telemetry radio and sent to the RTK receiver on the rover.
+
+
+
+The setup/connections for base and rover modules are shown below.
+
+### Base Setup (GCS)
+
+The base station connections are shown in the diagram below, along with the connection to a telemetry radio.
+
+
+
+Note that for the base we recommend the [NANO RTK Receiver](https://www.datagnss.com/collections/gnss-for-drone/products/multi-band-rtk-receiver-package) because it is easier to setup.
+
+
+
+See to [How to setup Base station](https://wiki.datagnss.com/index.php/GEM1305-autopilot#Base_station_setup) for information on how to configure the module for use as a base station (not including step 6 and later, for which you would QGroundControl instead of Mission Planner).
+
+### Rover Setup (PX4)
+
+The rover setup showing connections to a GPS port and the (required) connection to a telemetry radio are shown in the diagram below.
+
+
+
+The diagram below shows the wiring from the `GPS2` port on the Pixhawk 6c flight controller.
+Note that an appropriate cable is supplied for this purpose.
+
+GPS and RTK configuration on PX4 via _QGroundControl_ is plug and play (see [RTK GPS](../gps_compass/rtk_gps.md) for more information).
+
+## Package List
+
+- NANO HRTK Receiver
+- DG-6P-Cxx, GH-1.25mm-GH 6P cable
+- Helix antenna L1/L2/L5 (optional)
+
+## Resources
+
+- [NANO RTK Receiver 2D drawing file](https://wiki.datagnss.com/images/3/31/EVK-DG-1206_V.2.0.pdf)
+- [NANO HRTK Receiver Wiki](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-helix-rtk/) (DATAGNSS WiKi)
+- [HED-10L Heading RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/HED-10L/)
+
+## More information
+
+- [NANO RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-rtk-receiver)
+- [HELIX Antenna for RTK](https://www.datagnss.com/collections/rtk-antenna/products/smart-helix-antenna)
+- [RTK Antenna AGR6302G](https://www.datagnss.com/collections/rtk-antenna/products/antenna-agr6302g)
+- [AT400 RTK Antenna](https://www.datagnss.com/collections/rtk-antenna/products/at400-multi-band-antenna-for-rtk)
diff --git a/docs/ko/gps_compass/rtk_gps_gem1305.md b/docs/ko/gps_compass/rtk_gps_gem1305.md
index 3253afbb9d..a10248fed2 100644
--- a/docs/ko/gps_compass/rtk_gps_gem1305.md
+++ b/docs/ko/gps_compass/rtk_gps_gem1305.md
@@ -1,24 +1,22 @@
# DATAGNSS GEM1305 RTK Receiver with antenna
-GEM1305 is a RTK receiver with antenna designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
+GEM1305 is an [RTK GNSS](../gps_compass/rtk_gps.md) receiver with antenna designed and manufactured by [DATAGNSS](https://www.datagnss.com/).
GEM1305 is based on the new generation CYNOSURE IV dual-core GNSS SoC.
It supports RTK functionality with a maximum data update rate of 10Hz, and comes with cables for connecting to GPS ports on most Pixhawk devices.
- -
-::: info
-
-- GEM1305 RTK doesn't support moving base mode yet.
-- GEM1305 RTK does not include a compass.
+
+:::info
+GEM1305 supports both base and rover options.
+It does not yet support _moving base_ mode.
:::
## 구매처
- [GEM1305 RTK receiver with antenna](https://www.datagnss.com/collections/gnss-for-drone/products/gem1305) (www.datagnss.com)
-
-
-::: info
-
-- GEM1305 RTK doesn't support moving base mode yet.
-- GEM1305 RTK does not include a compass.
+
+:::info
+GEM1305 supports both base and rover options.
+It does not yet support _moving base_ mode.
:::
## 구매처
- [GEM1305 RTK receiver with antenna](https://www.datagnss.com/collections/gnss-for-drone/products/gem1305) (www.datagnss.com)
-  + 
- [DGM10 RTK Receiver](https://www.datagnss.com/collections/gnss-for-drone/products/dgm10-rtk-receiver) (same receiver in a casing).
@@ -28,6 +26,7 @@ It supports RTK functionality with a maximum data update rate of 10Hz, and comes
- Full constellation, multi-frequency GNSS satellite receiver
- Support RTK with up to 10hz output rate
+- IST8310 compass
- Standard UART serial interface
- Lightweight only 50g or 26g(NANO RTK receiver)
- High performance antenna
@@ -73,16 +72,7 @@ The board is connected to the autopilot via UART interface.

-The 1.25mm pitch 6P connector (from left: PIN1 to PIN6):
-
-- 1: GND
-- 2: NC
-- 3: PPS
-- 4: Rx
-- 5: Tx
-- 6: 5V
-
-The board does not include a compass and so does not require connections for a compass part.
+The 1.25mm pitch 6P connector (from left: PIN1 to PIN6) supports UART for GNSS and I2C for compass.
## 하드웨어 설정
@@ -125,10 +115,10 @@ GPS and RTK configuration on PX4 via _QGroundControl_ is plug and play (see [RTK
## Resources
-- [GEM1305 2D drawing file](https://wiki.datagnss.com/index.php/GEM1305)
- [NANO RTK Receiver 2D drawing file](https://wiki.datagnss.com/images/3/31/EVK-DG-1206_V.2.0.pdf)
-- [GEM1305 Wiki](https://wiki.datagnss.com/index.php/GEM1305) (DATAGNSS WiKi)
-- [HED-10L Heading RTK Receiver](https://wiki.datagnss.com/index.php/HED-10L)
+- [GEM1305 Wiki](https://docs.datagnss.com/gnss/rtk_receiver/GEM1305/) (DATAGNSS WiKi)
+- [HED-10L Heading RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/HED-10L/)
+- [NANO HRTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-helix-rtk/)
## More information
diff --git a/docs/ko/gps_compass/rtk_gps_trimble_mb_two.md b/docs/ko/gps_compass/rtk_gps_trimble_mb_two.md
index 9781d0e738..4cfbadc34c 100644
--- a/docs/ko/gps_compass/rtk_gps_trimble_mb_two.md
+++ b/docs/ko/gps_compass/rtk_gps_trimble_mb_two.md
@@ -1,6 +1,6 @@
# Trimble MB-Two
-The [Trimble MB-Two RTK GPS receiver](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) is a high-end, dual-frequency [RTK GPS module](../gps_compass/rtk_gps.md) that can be configured as either base or rover.
+The [Trimble MB-Two RTK GPS receiver](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) is a high-end, dual-frequency [RTK GPS module](../gps_compass/rtk_gps.md) that can be configured as either base or rover.
정확한 위치 정보를 제공하는 것만 아니라, MB-Two는 방향 각도를 추정할 수 있습니다 (이중 안테나 지원이 있음). 이것은 금속 구조물 근처에서 비행시 나침반 정보가 부정확한 상황에서 매우 유용합니다.
@@ -18,7 +18,7 @@ The [Trimble MB-Two RTK GPS receiver](https://www.trimble.com/Precision-GNSS/MB-
## 안테나 케이블
Trimble MB-Two에는 2개의 이중 주파수(L1/L2) 안테나가 필요합니다.
-A good example is the [Maxtenna M1227HCT-A2-SMA](http://www.maxtena.com/products/helicore/m1227hct-a2-sma/)
+A good example is the [Maxtenna M1227HCT-A2-SMA](https://www.maxtena.com/products/helicore/m1227hct-a2-sma/)
(which can be bought, for instance, from [Farnell](https://uk.farnell.com/maxtena/m1227hct-a2-sma/antenna-1-217-1-25-1-565-1-61ghz/dp/2484959)).
장치의 안테나 커넥터 유형은 MMCX입니다.
diff --git a/docs/ko/hardware/board_support_guide.md b/docs/ko/hardware/board_support_guide.md
index ddd64c3647..74026b2fc6 100644
--- a/docs/ko/hardware/board_support_guide.md
+++ b/docs/ko/hardware/board_support_guide.md
@@ -22,7 +22,6 @@ Boards that are not compliant with the requirements are [unsupported](#unsupport
3. 고객을 지원하고 고객이 연락할 수 있는 명확하고 쉬운 방법이 있어야 합니다.
다음과 같은 방법이 허용됩니다.
-
- PX4 Discord server presence
- 지원 이메일
- 전화번호
@@ -33,7 +32,6 @@ Boards that are not compliant with the requirements are [unsupported](#unsupport
For more information on bootloaders see: [PX4 Nuttx Porting Guide > Bootloader](../hardware/porting_guide_nuttx.md#bootloader).
6. 다음 내용을 포함하는 적절한 문서:
-
- PX4 핀 정의를 아래에 매핑하는 완전한 핀배열 공개:
1. 마이크로컨트롤러 핀
2. 물리적 외부 커넥터
@@ -52,13 +50,11 @@ Manufacturer supported boards may be as well/better supported than Pixhawk board
## Pixhawk표준
-Pixhawk 보드는 Pixhawk 표준을 준수하는 보드입니다. These standards are laid out on [http://pixhawk.org](http://pixhawk.org/), but at high-level require that the board passes electrical tests mandated by the standard and the manufacturer has signed the Pixhawk adopter and trademark agreement.
+Pixhawk 보드는 Pixhawk 표준을 준수하는 보드입니다. These standards are laid out on [pixhawk.org](https://pixhawk.org/), but at high-level require that the board passes electrical tests mandated by the standard and the manufacturer has signed the Pixhawk adopter and trademark agreement.
PX4는 일반적으로 상업적으로 사용 가능한 보드만 지원하므로, 일반적으로 지난 5년 이내에 출시된 보드 표준이 지원됩니다.
-
-
-### VER 및 REV ID(하드웨어 개정 및 버전 감지)
+### VER and REV ID (Hardware Revision and Version Sensing) {#ver_rev_id}
FMUv5 이상에는 전기 감지 메커니즘이 있습니다.
선택적 구성 데이터와 결합된 이 감지는 필수 장치 및 전원 공급 장치 구성과 관련하여 하드웨어 구성을 정의합니다. Manufacturers must obtain the VER and REV ID from PX4 board maintainers by issuing a PR to ammend the [DS-018 Pixhawk standard](https://github.com/pixhawk/Pixhawk-Standards) for board versions and revisions.
diff --git a/docs/ko/hardware/porting_guide_nuttx.md b/docs/ko/hardware/porting_guide_nuttx.md
index 42894dc976..5b46be49b3 100644
--- a/docs/ko/hardware/porting_guide_nuttx.md
+++ b/docs/ko/hardware/porting_guide_nuttx.md
@@ -53,7 +53,7 @@ To run `qconfig` you may need to install additional Qt dependencies.
- STM32H7: 부트로더는 NuttX를 기반으로 하며, PX4 펌웨어에 포함되어 있습니다.
See [here](https://github.com/PX4/PX4-Autopilot/tree/main/boards/holybro/durandal-v1/nuttx-config/bootloader) for an example.
-- 다른 대상의 경우 https://github.com/PX4/Bootloader가 사용됩니다. See [here](https://github.com/PX4/Bootloader/pull/155/files) for an example how to add a new target.
+- For all other targets, https://github.com/PX4/PX4-Bootloader is used. See [here](https://github.com/PX4/PX4-Bootloader/pull/155/files) for an example how to add a new target.
Then checkout the [building and flashing instructions](../software_update/stm32_bootloader.md).
### 펌웨어 포팅 단계
diff --git a/docs/ko/hardware/reference_design.md b/docs/ko/hardware/reference_design.md
index 55825009a1..e5a4e1e46c 100644
--- a/docs/ko/hardware/reference_design.md
+++ b/docs/ko/hardware/reference_design.md
@@ -12,13 +12,13 @@ FMU 1~3세대는 개방형 하드웨어로 설계되었으나, FMU 4세대와 5
## 레퍼런스 디자인 세대
-- FMUv1: Development board \(STM32F407, 128 KB RAM, 1MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv1)\) (no longer supported by PX4)
-- FMUv2: Pixhawk \(STM32F427, 168 MHz, 192 KB RAM, 1MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv2)\)
-- FMUv3: Pixhawk variants with 2MB flash \(3DR Pixhawk 2 \(Solo\), Hex Pixhawk 2.1, Holybro Pixfalcon, 3DR Pixhawk Mini, STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv3_REV_D)\)
+- FMUv1: Development board \(STM32F407, 128 KB RAM, 1MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv1)\) (no longer supported by PX4)
+- FMUv2: Pixhawk \(STM32F427, 168 MHz, 192 KB RAM, 1MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv2)\)
+- FMUv3: Pixhawk variants with 2MB flash \(3DR Pixhawk 2 \(Solo\), Hex Pixhawk 2.1, Holybro Pixfalcon, 3DR Pixhawk Mini, STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv3_REV_D)\)
- FMUv4: Pixracer \(STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1raRRouNsveQz8cj-EneWG6iW0dqGfRAifI91I2Sr5E0/edit#gid=1585075739)\)
- FMUv4 PRO: Drotek Pixhawk 3 PRO \(STM32F469, 180 MHz, 384 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1raRRouNsveQz8cj-EneWG6iW0dqGfRAifI91I2Sr5E0/edit#gid=1585075739)\)
- FMUv5: Holybro Pixhawk 4 \(STM32F765, 216 MHz, 512 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165)\)
-- FMUv5X: (Multiple Products) \(STM32F765, 400 MHz, 512KB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-011%20Pixhawk%20Autopilot%20v5X%20Standard.pdf))
+- FMUv5X: (Multiple Products) \(STM32F765, 400 MHz, 512KB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-011%20Pixhawk%20Autopilot%20v5X%20Standard.pdf))
- FMUv6X: (Multiple Products) \(STM32H753, 480 MHz, 1 MB RAM, 2 MB flash\) and variant 6i \(i.MX RT1050, 600 MHz, 512 KB RAM, external flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-012%20Pixhawk%20Autopilot%20v6X%20Standard.pdf))
- FMUv6C: (Multiple Products) \(STM32H743V, 480 MHz, 1 MB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-018%20Pixhawk%20Autopilot%20v6C%20Standard.pdf))
- FMUv6U: (Multiple Products) \(STM32H753, 400 MHz, 1 MB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-016%20Pixhawk%20Autopilot%20v6U%20Standard.pdf))
diff --git a/docs/ko/index.md b/docs/ko/index.md
index f638fff4a7..c688fb6081 100644
--- a/docs/ko/index.md
+++ b/docs/ko/index.md
@@ -102,7 +102,7 @@ There are several [translations](contribute/translation.md) of this guide.
## 라이선스
-PX4 code is free to use and modify under the terms of the permissive [BSD 3-clause license](https://opensource.org/licenses/BSD-3-Clause).
+PX4 code is free to use and modify under the terms of the permissive [BSD 3-clause license](https://opensource.org/license/BSD-3-Clause).
This documentation is licensed under [CC BY 4.0](https://creativecommons.org/licenses/by/4.0/).
For more information see: [Licences](contribute/licenses.md).
@@ -129,7 +129,7 @@ The calendar default timezone is Central European Time (CET).
+ 
- [DGM10 RTK Receiver](https://www.datagnss.com/collections/gnss-for-drone/products/dgm10-rtk-receiver) (same receiver in a casing).
@@ -28,6 +26,7 @@ It supports RTK functionality with a maximum data update rate of 10Hz, and comes
- Full constellation, multi-frequency GNSS satellite receiver
- Support RTK with up to 10hz output rate
+- IST8310 compass
- Standard UART serial interface
- Lightweight only 50g or 26g(NANO RTK receiver)
- High performance antenna
@@ -73,16 +72,7 @@ The board is connected to the autopilot via UART interface.

-The 1.25mm pitch 6P connector (from left: PIN1 to PIN6):
-
-- 1: GND
-- 2: NC
-- 3: PPS
-- 4: Rx
-- 5: Tx
-- 6: 5V
-
-The board does not include a compass and so does not require connections for a compass part.
+The 1.25mm pitch 6P connector (from left: PIN1 to PIN6) supports UART for GNSS and I2C for compass.
## 하드웨어 설정
@@ -125,10 +115,10 @@ GPS and RTK configuration on PX4 via _QGroundControl_ is plug and play (see [RTK
## Resources
-- [GEM1305 2D drawing file](https://wiki.datagnss.com/index.php/GEM1305)
- [NANO RTK Receiver 2D drawing file](https://wiki.datagnss.com/images/3/31/EVK-DG-1206_V.2.0.pdf)
-- [GEM1305 Wiki](https://wiki.datagnss.com/index.php/GEM1305) (DATAGNSS WiKi)
-- [HED-10L Heading RTK Receiver](https://wiki.datagnss.com/index.php/HED-10L)
+- [GEM1305 Wiki](https://docs.datagnss.com/gnss/rtk_receiver/GEM1305/) (DATAGNSS WiKi)
+- [HED-10L Heading RTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/HED-10L/)
+- [NANO HRTK Receiver](https://docs.datagnss.com/gnss/rtk_receiver/NANO/nano-helix-rtk/)
## More information
diff --git a/docs/ko/gps_compass/rtk_gps_trimble_mb_two.md b/docs/ko/gps_compass/rtk_gps_trimble_mb_two.md
index 9781d0e738..4cfbadc34c 100644
--- a/docs/ko/gps_compass/rtk_gps_trimble_mb_two.md
+++ b/docs/ko/gps_compass/rtk_gps_trimble_mb_two.md
@@ -1,6 +1,6 @@
# Trimble MB-Two
-The [Trimble MB-Two RTK GPS receiver](https://www.trimble.com/Precision-GNSS/MB-Two-Board.aspx) is a high-end, dual-frequency [RTK GPS module](../gps_compass/rtk_gps.md) that can be configured as either base or rover.
+The [Trimble MB-Two RTK GPS receiver](https://oemgnss.trimble.com/en/products/receiver-modules/mb-two) is a high-end, dual-frequency [RTK GPS module](../gps_compass/rtk_gps.md) that can be configured as either base or rover.
정확한 위치 정보를 제공하는 것만 아니라, MB-Two는 방향 각도를 추정할 수 있습니다 (이중 안테나 지원이 있음). 이것은 금속 구조물 근처에서 비행시 나침반 정보가 부정확한 상황에서 매우 유용합니다.
@@ -18,7 +18,7 @@ The [Trimble MB-Two RTK GPS receiver](https://www.trimble.com/Precision-GNSS/MB-
## 안테나 케이블
Trimble MB-Two에는 2개의 이중 주파수(L1/L2) 안테나가 필요합니다.
-A good example is the [Maxtenna M1227HCT-A2-SMA](http://www.maxtena.com/products/helicore/m1227hct-a2-sma/)
+A good example is the [Maxtenna M1227HCT-A2-SMA](https://www.maxtena.com/products/helicore/m1227hct-a2-sma/)
(which can be bought, for instance, from [Farnell](https://uk.farnell.com/maxtena/m1227hct-a2-sma/antenna-1-217-1-25-1-565-1-61ghz/dp/2484959)).
장치의 안테나 커넥터 유형은 MMCX입니다.
diff --git a/docs/ko/hardware/board_support_guide.md b/docs/ko/hardware/board_support_guide.md
index ddd64c3647..74026b2fc6 100644
--- a/docs/ko/hardware/board_support_guide.md
+++ b/docs/ko/hardware/board_support_guide.md
@@ -22,7 +22,6 @@ Boards that are not compliant with the requirements are [unsupported](#unsupport
3. 고객을 지원하고 고객이 연락할 수 있는 명확하고 쉬운 방법이 있어야 합니다.
다음과 같은 방법이 허용됩니다.
-
- PX4 Discord server presence
- 지원 이메일
- 전화번호
@@ -33,7 +32,6 @@ Boards that are not compliant with the requirements are [unsupported](#unsupport
For more information on bootloaders see: [PX4 Nuttx Porting Guide > Bootloader](../hardware/porting_guide_nuttx.md#bootloader).
6. 다음 내용을 포함하는 적절한 문서:
-
- PX4 핀 정의를 아래에 매핑하는 완전한 핀배열 공개:
1. 마이크로컨트롤러 핀
2. 물리적 외부 커넥터
@@ -52,13 +50,11 @@ Manufacturer supported boards may be as well/better supported than Pixhawk board
## Pixhawk표준
-Pixhawk 보드는 Pixhawk 표준을 준수하는 보드입니다. These standards are laid out on [http://pixhawk.org](http://pixhawk.org/), but at high-level require that the board passes electrical tests mandated by the standard and the manufacturer has signed the Pixhawk adopter and trademark agreement.
+Pixhawk 보드는 Pixhawk 표준을 준수하는 보드입니다. These standards are laid out on [pixhawk.org](https://pixhawk.org/), but at high-level require that the board passes electrical tests mandated by the standard and the manufacturer has signed the Pixhawk adopter and trademark agreement.
PX4는 일반적으로 상업적으로 사용 가능한 보드만 지원하므로, 일반적으로 지난 5년 이내에 출시된 보드 표준이 지원됩니다.
-
-
-### VER 및 REV ID(하드웨어 개정 및 버전 감지)
+### VER and REV ID (Hardware Revision and Version Sensing) {#ver_rev_id}
FMUv5 이상에는 전기 감지 메커니즘이 있습니다.
선택적 구성 데이터와 결합된 이 감지는 필수 장치 및 전원 공급 장치 구성과 관련하여 하드웨어 구성을 정의합니다. Manufacturers must obtain the VER and REV ID from PX4 board maintainers by issuing a PR to ammend the [DS-018 Pixhawk standard](https://github.com/pixhawk/Pixhawk-Standards) for board versions and revisions.
diff --git a/docs/ko/hardware/porting_guide_nuttx.md b/docs/ko/hardware/porting_guide_nuttx.md
index 42894dc976..5b46be49b3 100644
--- a/docs/ko/hardware/porting_guide_nuttx.md
+++ b/docs/ko/hardware/porting_guide_nuttx.md
@@ -53,7 +53,7 @@ To run `qconfig` you may need to install additional Qt dependencies.
- STM32H7: 부트로더는 NuttX를 기반으로 하며, PX4 펌웨어에 포함되어 있습니다.
See [here](https://github.com/PX4/PX4-Autopilot/tree/main/boards/holybro/durandal-v1/nuttx-config/bootloader) for an example.
-- 다른 대상의 경우 https://github.com/PX4/Bootloader가 사용됩니다. See [here](https://github.com/PX4/Bootloader/pull/155/files) for an example how to add a new target.
+- For all other targets, https://github.com/PX4/PX4-Bootloader is used. See [here](https://github.com/PX4/PX4-Bootloader/pull/155/files) for an example how to add a new target.
Then checkout the [building and flashing instructions](../software_update/stm32_bootloader.md).
### 펌웨어 포팅 단계
diff --git a/docs/ko/hardware/reference_design.md b/docs/ko/hardware/reference_design.md
index 55825009a1..e5a4e1e46c 100644
--- a/docs/ko/hardware/reference_design.md
+++ b/docs/ko/hardware/reference_design.md
@@ -12,13 +12,13 @@ FMU 1~3세대는 개방형 하드웨어로 설계되었으나, FMU 4세대와 5
## 레퍼런스 디자인 세대
-- FMUv1: Development board \(STM32F407, 128 KB RAM, 1MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv1)\) (no longer supported by PX4)
-- FMUv2: Pixhawk \(STM32F427, 168 MHz, 192 KB RAM, 1MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv2)\)
-- FMUv3: Pixhawk variants with 2MB flash \(3DR Pixhawk 2 \(Solo\), Hex Pixhawk 2.1, Holybro Pixfalcon, 3DR Pixhawk Mini, STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [schematics](https://github.com/PX4/Hardware/tree/master/FMUv3_REV_D)\)
+- FMUv1: Development board \(STM32F407, 128 KB RAM, 1MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv1)\) (no longer supported by PX4)
+- FMUv2: Pixhawk \(STM32F427, 168 MHz, 192 KB RAM, 1MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv2)\)
+- FMUv3: Pixhawk variants with 2MB flash \(3DR Pixhawk 2 \(Solo\), Hex Pixhawk 2.1, Holybro Pixfalcon, 3DR Pixhawk Mini, STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [schematics](https://github.com/pixhawk/Hardware/tree/master/FMUv3_REV_D)\)
- FMUv4: Pixracer \(STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1raRRouNsveQz8cj-EneWG6iW0dqGfRAifI91I2Sr5E0/edit#gid=1585075739)\)
- FMUv4 PRO: Drotek Pixhawk 3 PRO \(STM32F469, 180 MHz, 384 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1raRRouNsveQz8cj-EneWG6iW0dqGfRAifI91I2Sr5E0/edit#gid=1585075739)\)
- FMUv5: Holybro Pixhawk 4 \(STM32F765, 216 MHz, 512 KB RAM, 2 MB flash, [pinout](https://docs.google.com/spreadsheets/d/1-n0__BYDedQrc_2NHqBenG1DNepAgnHpSGglke-QQwY/edit#gid=912976165)\)
-- FMUv5X: (Multiple Products) \(STM32F765, 400 MHz, 512KB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-011%20Pixhawk%20Autopilot%20v5X%20Standard.pdf))
+- FMUv5X: (Multiple Products) \(STM32F765, 400 MHz, 512KB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-011%20Pixhawk%20Autopilot%20v5X%20Standard.pdf))
- FMUv6X: (Multiple Products) \(STM32H753, 480 MHz, 1 MB RAM, 2 MB flash\) and variant 6i \(i.MX RT1050, 600 MHz, 512 KB RAM, external flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-012%20Pixhawk%20Autopilot%20v6X%20Standard.pdf))
- FMUv6C: (Multiple Products) \(STM32H743V, 480 MHz, 1 MB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-018%20Pixhawk%20Autopilot%20v6C%20Standard.pdf))
- FMUv6U: (Multiple Products) \(STM32H753, 400 MHz, 1 MB RAM, 2 MB flash\) ([standard](https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-016%20Pixhawk%20Autopilot%20v6U%20Standard.pdf))
diff --git a/docs/ko/index.md b/docs/ko/index.md
index f638fff4a7..c688fb6081 100644
--- a/docs/ko/index.md
+++ b/docs/ko/index.md
@@ -102,7 +102,7 @@ There are several [translations](contribute/translation.md) of this guide.
## 라이선스
-PX4 code is free to use and modify under the terms of the permissive [BSD 3-clause license](https://opensource.org/licenses/BSD-3-Clause).
+PX4 code is free to use and modify under the terms of the permissive [BSD 3-clause license](https://opensource.org/license/BSD-3-Clause).
This documentation is licensed under [CC BY 4.0](https://creativecommons.org/licenses/by/4.0/).
For more information see: [Licences](contribute/licenses.md).
@@ -129,7 +129,7 @@ The calendar default timezone is Central European Time (CET).
") _placeholder_ icon made by Smashicons from www.flaticon.com is licensed by CC 3.0 BY.
-
_placeholder_ icon made by Smashicons from www.flaticon.com is licensed by CC 3.0 BY.
- _camera-automatic-mode_ icon made by Freepik from www.flaticon.com is licensed by CC 3.0 BY.
+ _camera-automatic-mode_ icon made by Freepik from www.flaticon.com is licensed by CC 3.0 BY.
## 운영 방법
diff --git a/docs/ko/modules/hello_sky.md b/docs/ko/modules/hello_sky.md
index 3835f33138..f32e85ec7b 100644
--- a/docs/ko/modules/hello_sky.md
+++ b/docs/ko/modules/hello_sky.md
@@ -28,7 +28,6 @@ This consists of a single _C_ file and a _cmake_ definition (which tells the too
1. Create a new directory **PX4-Autopilot/src/examples/px4_simple_app**.
2. Create a new C file in that directory named **px4_simple_app.c**:
-
- 기본 헤더를 페이지 상단에 복사합니다.
이것은 기여한 모든 파일에 첨부하여야 합니다.
@@ -308,7 +307,7 @@ int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
The `sensor_sub_fd` is a topic handle and can be used to very efficiently perform a blocking wait for new data.
현재 스레드는 절전 모드로 전환되고, 새 데이터를 사용할 수 있게 되면 스케줄러에 의해 자동으로 깨어나며 기다리는 동안 CPU 주기를 소비하지 않습니다.
-To do this, we use the [poll()](http://pubs.opengroup.org/onlinepubs/007908799/xsh/poll.html) POSIX system call.
+To do this, we use the [poll()](https://pubs.opengroup.org/onlinepubs/007908799/xsh/poll.html) POSIX system call.
Adding `poll()` to the subscription looks like (_pseudocode, look for the full implementation below_):
diff --git a/docs/ko/peripherals/frsky_telemetry.md b/docs/ko/peripherals/frsky_telemetry.md
index 9eb2fc7a77..ef5fc1acff 100644
--- a/docs/ko/peripherals/frsky_telemetry.md
+++ b/docs/ko/peripherals/frsky_telemetry.md
@@ -98,7 +98,7 @@ OpenTX 2.1.6 이상을 실행하는 Taranis 호환 수신기(예 : X9D Plus)는

-Instructions for installing the script can be found here: [LuaPilot Taranis Telemetry script > Taranis Setup OpenTX 2.1.6 or newer](http://ilihack.github.io/LuaPilot_Taranis_Telemetry/)
+Instructions for installing the script can be found here: [LuaPilot Taranis Telemetry script > Taranis Setup OpenTX 2.1.6 or newer](https://ilihack.github.io/LuaPilot_Taranis_Telemetry/)
If you open the `LuaPil.lua` script with a text editor, you can edit the configuration. 제안된 수정 사항은 다음과 같습니다.
@@ -191,7 +191,7 @@ Note that the X series receivers listed below are recommended (e.g. XSR, X8R). R
| R9 slim | 10km | S.Bus (16) | Smart Port | 43.3x26.8x13.9mm | 15.8g |
:::info
-The above table originates from http://www.redsilico.com/frsky-receiver-chart and FrSky [product documentation](https://www.frsky-rc.com/product-category/receivers/).
+The above table originates from https://blog.redsilico.com/frsky-receiver-chart and FrSky [product documentation](https://www.frsky-rc.com/product-category/receivers/).
:::
@@ -200,9 +200,9 @@ The above table originates from http://www.redsilico.com/frsky-receiver-chart an
Pixhawk FMUv4와 이전 버전 (Pixracer 제외)의 기성품 케이블은 아래에서 구매가능합니다.
-- [Craft and Theory](http://www.craftandtheoryllc.com/telemetry-cable). Versions are available with DF-13 compatible _PicoBlade connectors_ (for FMUv2/3DR Pixhawk, FMUv2/HKPilot32) and _JST-GH connectors_ (for FMUv3/Pixhawk 2 "The Cube" and FMUv4/PixRacer v1).
+- [Craft and Theory](https://www.craftandtheoryllc.com/store/telemetry-cables-for-smart-port-radios/). Versions are available with DF-13 compatible _PicoBlade connectors_ (for FMUv2/3DR Pixhawk, FMUv2/HKPilot32) and _JST-GH connectors_ (for FMUv3/Pixhawk 2 "The Cube" and FMUv4/PixRacer v1).
-
_camera-automatic-mode_ icon made by Freepik from www.flaticon.com is licensed by CC 3.0 BY.
+ _camera-automatic-mode_ icon made by Freepik from www.flaticon.com is licensed by CC 3.0 BY.
## 운영 방법
diff --git a/docs/ko/modules/hello_sky.md b/docs/ko/modules/hello_sky.md
index 3835f33138..f32e85ec7b 100644
--- a/docs/ko/modules/hello_sky.md
+++ b/docs/ko/modules/hello_sky.md
@@ -28,7 +28,6 @@ This consists of a single _C_ file and a _cmake_ definition (which tells the too
1. Create a new directory **PX4-Autopilot/src/examples/px4_simple_app**.
2. Create a new C file in that directory named **px4_simple_app.c**:
-
- 기본 헤더를 페이지 상단에 복사합니다.
이것은 기여한 모든 파일에 첨부하여야 합니다.
@@ -308,7 +307,7 @@ int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
The `sensor_sub_fd` is a topic handle and can be used to very efficiently perform a blocking wait for new data.
현재 스레드는 절전 모드로 전환되고, 새 데이터를 사용할 수 있게 되면 스케줄러에 의해 자동으로 깨어나며 기다리는 동안 CPU 주기를 소비하지 않습니다.
-To do this, we use the [poll()](http://pubs.opengroup.org/onlinepubs/007908799/xsh/poll.html) POSIX system call.
+To do this, we use the [poll()](https://pubs.opengroup.org/onlinepubs/007908799/xsh/poll.html) POSIX system call.
Adding `poll()` to the subscription looks like (_pseudocode, look for the full implementation below_):
diff --git a/docs/ko/peripherals/frsky_telemetry.md b/docs/ko/peripherals/frsky_telemetry.md
index 9eb2fc7a77..ef5fc1acff 100644
--- a/docs/ko/peripherals/frsky_telemetry.md
+++ b/docs/ko/peripherals/frsky_telemetry.md
@@ -98,7 +98,7 @@ OpenTX 2.1.6 이상을 실행하는 Taranis 호환 수신기(예 : X9D Plus)는

-Instructions for installing the script can be found here: [LuaPilot Taranis Telemetry script > Taranis Setup OpenTX 2.1.6 or newer](http://ilihack.github.io/LuaPilot_Taranis_Telemetry/)
+Instructions for installing the script can be found here: [LuaPilot Taranis Telemetry script > Taranis Setup OpenTX 2.1.6 or newer](https://ilihack.github.io/LuaPilot_Taranis_Telemetry/)
If you open the `LuaPil.lua` script with a text editor, you can edit the configuration. 제안된 수정 사항은 다음과 같습니다.
@@ -191,7 +191,7 @@ Note that the X series receivers listed below are recommended (e.g. XSR, X8R). R
| R9 slim | 10km | S.Bus (16) | Smart Port | 43.3x26.8x13.9mm | 15.8g |
:::info
-The above table originates from http://www.redsilico.com/frsky-receiver-chart and FrSky [product documentation](https://www.frsky-rc.com/product-category/receivers/).
+The above table originates from https://blog.redsilico.com/frsky-receiver-chart and FrSky [product documentation](https://www.frsky-rc.com/product-category/receivers/).
:::
@@ -200,9 +200,9 @@ The above table originates from http://www.redsilico.com/frsky-receiver-chart an
Pixhawk FMUv4와 이전 버전 (Pixracer 제외)의 기성품 케이블은 아래에서 구매가능합니다.
-- [Craft and Theory](http://www.craftandtheoryllc.com/telemetry-cable). Versions are available with DF-13 compatible _PicoBlade connectors_ (for FMUv2/3DR Pixhawk, FMUv2/HKPilot32) and _JST-GH connectors_ (for FMUv3/Pixhawk 2 "The Cube" and FMUv4/PixRacer v1).
+- [Craft and Theory](https://www.craftandtheoryllc.com/store/telemetry-cables-for-smart-port-radios/). Versions are available with DF-13 compatible _PicoBlade connectors_ (for FMUv2/3DR Pixhawk, FMUv2/HKPilot32) and _JST-GH connectors_ (for FMUv3/Pixhawk 2 "The Cube" and FMUv4/PixRacer v1).
-  +
@@ -215,7 +215,7 @@ Pixracer에는 S.PORT와 UART 간의 신호 변환 장치가 포함되어 있지
아래에서 구매 가능합니다.
- [FrSky FUL-1](https://www.frsky-rc.com/product/ful-1/): [unmannedtech.co.uk](https://www.unmannedtechshop.co.uk/frsky-transmitter-receiver-upgrade-adapter-ful-1/)
-- SPC: [getfpv.com](http://www.getfpv.com/frsky-smart-port-converter-cable.html), [unmannedtechshop.co.uk](https://www.unmannedtechshop.co.uk/frsky-smart-port-converter-spc/)
+- SPC: [getfpv.com](https://www.getfpv.com/frsky-smart-port-converter-cable.html), [unmannedtechshop.co.uk](https://www.unmannedtechshop.co.uk/frsky-smart-port-converter-spc/)
다른 보드에서의 연결 방법은 아래에 기술되어 있습니다.
diff --git a/docs/ko/peripherals/gripper_servo.md b/docs/ko/peripherals/gripper_servo.md
index 00626b188d..e1450ef2b5 100644
--- a/docs/ko/peripherals/gripper_servo.md
+++ b/docs/ko/peripherals/gripper_servo.md
@@ -9,7 +9,7 @@ This section explains how to connect and configure a [gripper](../peripherals/gr
The following PWM-connected servos have been tested with PX4:
- [R4-EM-R22-161 push-to-close latch electronic lock](https://southco.com/en_any_int/r4-em-r22-161) (SouthCo)
-- [FluxGrip FG40 electro-permanent magnetic gripper](http://zubax.com/fg40) (Zubax)
+- [FluxGrip FG40 electro-permanent magnetic gripper](https://shop.zubax.com/products/zubax-epm) (Zubax)
## Connecting a PWM-controlled Gripper
diff --git a/docs/ko/peripherals/vesc.md b/docs/ko/peripherals/vesc.md
index 926419301d..59e56712bc 100644
--- a/docs/ko/peripherals/vesc.md
+++ b/docs/ko/peripherals/vesc.md
@@ -55,4 +55,4 @@ See DroneCAN Troubleshooting - (index.md#troubleshooting).
## 추가 정보
- [VESC Project ESCs](https://vesc-project.com/)
-- [Benjamin Vedder's blog](http://vedder.se) (project owner)
+- [Benjamin Vedder's blog](https://vedder.se/) (project owner)
diff --git a/docs/ko/releases/1.12.md b/docs/ko/releases/1.12.md
index 34af2cebe7..9a8f80fe18 100644
--- a/docs/ko/releases/1.12.md
+++ b/docs/ko/releases/1.12.md
@@ -51,9 +51,9 @@
- Pixhawk FMUv6U (Read more about this spec on the [Pixhawk GitHub Repository](https://github.com/pixhawk/Pixhawk-Standards))
- Pixhawk FMUv6X (Read more about this spec on the [Pixhawk GitHub Repository](https://github.com/pixhawk/Pixhawk-Standards))
-- CUAV X7 / X7Pro ([Read more about this product on the manufacturers site](http://www.cuav.net/en/x7en/)]
-- CUAV Nora ([Read more about this product on the manufacturers site](http://www.cuav.net/en/nora/))
-- CUAV CAN GPS ([Read more about this product on the manufacturers site](http://www.cuav.net/en/neo-3-2/))
+- CUAV X7 / X7Pro
+- CUAV Nora
+- CUAV CAN GPS (Neo-3-2)
- SP Racing H7 Extreme ([Read more about this product on the manufacturers site](http://seriouslypro.com/spracingh7extreme))
- Bitcraze Crazyflie v2.1 ([Read more about this product on the manufacturers site](https://www.bitcraze.io/products/crazyflie-2-1/))
- ARK CAN Flow ([Read more about this product on the manufacturers site](https://arkelectron.com/product/ark-flow/))
@@ -81,7 +81,6 @@
### 멀티콥터
- **More intuitive stick feel in Position mode**
-
- 속도 설정값 대신 가속에 매핑된 수평 스틱 입력
- 이동 속도 속도에 도달시의 갑작스런 기울기 변화를 제거합니다.
- 직관적인 단락(예: 착륙시)
@@ -89,7 +88,6 @@
- Development: [First attempt](https://github.com/PX4/PX4-Autopilot/pull/12072), [Introduction](https://github.com/PX4/PX4-Autopilot/pull/16052), [Improvements](https://github.com/PX4/PX4-Autopilot/pull/16320), [Bugfix zero oscillation](https://github.com/PX4/PX4-Autopilot/pull/16786), [Bugfix position unlock](https://github.com/PX4/PX4-Autopilot/pull/16791), [Bugfix invalid setpoint](https://github.com/PX4/PX4-Autopilot/pull/17078), [Bugfix high velocity pre takeoff](https://github.com/PX4/PX4-Autopilot/pull/17437)
- **Hover thrust independent velocity control gains**
-
- Parameters `MPC_{XY/Z}_VEL_{P/I/D}` were replaced with `MPC_{XY/Z}_VEL_{P/I/D}_ACC`, see:
[MPC_XY_VEL_P_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_P_ACC), [MPC_XY_VEL_I_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_I_ACC), [MPC_XY_VEL_D_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_D_ACC), [MPC_Z_VEL_P_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_P_ACC), [MPC_Z_VEL_I_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_I_ACC), [MPC_Z_VEL_D_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_D_ACC)
@@ -144,7 +142,6 @@ Nuttx was upgraded from [8.2+ to NuttX 10.10.0+](https://github.com/apache/incub
- [**BACKPORT**] stm32:Ethernet Fix too big frames
- **Boot up stability** V5-V6X ensuring the LSE (RTC) oscillator is started
-
- [**BACKPORT**] stm32h7:lse fix Kconfig help text
- [**BACKPORT**] stm32f7:lse Use Kconfig values directly
- [**BACKPORT**] stm32h7:Add DBGMCU
@@ -164,7 +161,6 @@ Nuttx was upgraded from [8.2+ to NuttX 10.10.0+](https://github.com/apache/incub
:::
- **Driver changes**
-
- [**BACKPORT**] drivers/serial: fix Rx interrupt enable for cdcacm
- [**BACKPORT**] binnfmt:Fix return before close ELF fd
diff --git a/docs/ko/releases/1.16.md b/docs/ko/releases/1.16.md
index cdd1b2670c..c5c2b7faf8 100644
--- a/docs/ko/releases/1.16.md
+++ b/docs/ko/releases/1.16.md
@@ -208,7 +208,7 @@ This release contains a major rework for the rover support in PX4:
- Generic Mecanum Rover `52000`.
- Library for the [pure pursuit guidance algorithm](../config_rover/position_tuning.md#pure-pursuit-guidance-logic-info-only) that is shared by all the rover modules.
- [Simulation](../frames_rover/index.md#simulation) for differential-steering and Ackermann rovers in gazebo (for release notes see `r1_rover` and `rover_ackermann` in [simulation](#simulation)).
-- Deprecation of the [rover position control](../frames_rover/rover_position_control.md) module: Note that the legacy rover module still exists but has been superseded by the new dedicated modules.
+- Deprecation of the `rover position control` module: Note that the legacy rover module still exists but has been superseded by the new dedicated modules.
### Infrastructure
diff --git a/docs/ko/ros/external_position_estimation.md b/docs/ko/ros/external_position_estimation.md
index ac971366e7..2dabff3dd3 100644
--- a/docs/ko/ros/external_position_estimation.md
+++ b/docs/ko/ros/external_position_estimation.md
@@ -187,7 +187,7 @@ MAVROS에는 다음 파이프라인을 사용하여 VIO 또는 MoCap 시스템
위의 파이프라인 중 하나를 LPE와 함께 사용할 수 있습니다.
EKF2로 작업하는 경우 "비전" 파이프라인만 지원됩니다.
-To use MoCap data with EKF2 you will have to [remap](http://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
+To use MoCap data with EKF2 you will have to [remap](https://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
- MoCap ROS topics of type `geometry_msgs/PoseStamped` or `geometry_msgs/PoseWithCovarianceStamped` must be remapped to `/mavros/vision_pose/pose`.
The `geometry_msgs/PoseStamped` topic is most common as MoCap doesn't usually have associated covariances to the data.
@@ -205,7 +205,7 @@ ROS와 PX4에서 사용하는 로컬과 전역 프레임은 같지 않습니다.
| 전역 | FRD or NED (X **N**orth, Y **E**ast, Z **D**own) | FLU or ENU (X **E**ast, Y **N**orth, Z **U**p), with the naming being `odom` or `map` |
:::tip
-See [REP105: Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
+See [REP105: Coordinate Frames for Mobile Platforms](https://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
:::
두 프레임 모두 아래 이미지에 표시됩니다(왼쪽의 FRD/오른쪽의 FLU).
@@ -236,7 +236,7 @@ MAVROS 주행 거리 측정 플러그인은 MAVROS에 의해 알려진 기체의
```
Make sure that you change the values of yaw, pitch and roll such that it properly attaches the external pose's body frame to the `base_link` or `base_link_frd`.
-Have a look at the [tf package](http://wiki.ros.org/tf#static_transform_publisher) for further help on how to specify the transformation between the frames.
+Have a look at the [tf package](https://wiki.ros.org/tf#static_transform_publisher) for further help on how to specify the transformation between the frames.
rviz를 사용하여 프레임을 올바르게 부착했는 지 확인할 수 있습니다. The name of the `external_pose_child_frame` has to match the child_frame_id of your `nav_msgs/Odometry` message.
외부 포즈의 기준 프레임에도 동일하게 적용됩니다. You have to attach the reference frame of the external pose as child to either the `odom` or `odom_frd` frame. 따라서, 다음 코드 줄을 적절하게 조정하십시오.
diff --git a/docs/ko/ros/mavros_installation.md b/docs/ko/ros/mavros_installation.md
index dbce1bf734..a049519917 100644
--- a/docs/ko/ros/mavros_installation.md
+++ b/docs/ko/ros/mavros_installation.md
@@ -7,7 +7,7 @@ The PX4 development team recommend that all users [upgrade to ROS 2](../ros2/ind
This documentation explains how to set up communication between the PX4 Autopilot and a ROS 1 enabled companion computer using MAVROS.
-[MAVROS](http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status) is a ROS 1 package that enables MAVLink extendable communication between computers running ROS 1 for any MAVLink enabled autopilot, ground station, or peripheral.
+[MAVROS](https://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status) is a ROS 1 package that enables MAVLink extendable communication between computers running ROS 1 for any MAVLink enabled autopilot, ground station, or peripheral.
_MAVROS_ is the "official" supported bridge between ROS 1 and the MAVLink protocol.
First we install PX4 and ROS, and then MAVROS.
@@ -26,10 +26,9 @@ They cover the _ROS Melodic and Noetic_ releases.
:::tab ROS Noetic (Ubuntu 20.04)
-If you're working with [ROS Noetic](http://wiki.ros.org/noetic) on Ubuntu 20.04:
+If you're working with [ROS Noetic](https://wiki.ros.org/noetic) on Ubuntu 20.04:
1. Install PX4 without the simulator toolchain:
-
1. [Download PX4 Source Code](../dev_setup/building_px4.md):
```sh
@@ -52,7 +51,7 @@ If you're working with [ROS Noetic](http://wiki.ros.org/noetic) on Ubuntu 20.04:
sudo apt-get install protobuf-compiler libeigen3-dev libopencv-dev -y
```
-3. Follow the [Noetic Installation instructions](http://wiki.ros.org/noetic/Installation/Ubuntu#Installation) (ros-noetic-desktop-full is recommended).
+3. Follow the [Noetic Installation instructions](https://wiki.ros.org/noetic/Installation/Ubuntu#Installation) (ros-noetic-desktop-full is recommended).
:::
@@ -81,7 +80,7 @@ If you're working with ROS "Melodic on Ubuntu 18.04:
- ROS Melodic is installed with Gazebo (Classic) 9 by default.
- Your catkin (ROS build system) workspace is created at **~/catkin_ws/**.
- - The script uses instructions from the ROS Wiki "Melodic" [Ubuntu page](http://wiki.ros.org/melodic/Installation/Ubuntu).
+ - The script uses instructions from the ROS Wiki "Melodic" [Ubuntu page](https://wiki.ros.org/melodic/Installation/Ubuntu).
:::
@@ -147,7 +146,6 @@ Now you are ready to do the build:
```
2. 릴리스 또는 최신 버전을 사용하여 소스에서 MAVROS를 설치합니다.
-
- 출시/안정
```sh
@@ -205,6 +203,6 @@ If you have an example app using the PX4 Autopilot and MAVROS, we can help you g
## See Also
-- [mavros ROS Package Summary](http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status)
+- [mavros ROS Package Summary](https://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status)
- [mavros source](https://github.com/mavlink/mavros/)
-- [ROS Melodic installation instructions](http://wiki.ros.org/melodic/Installation)
+- [ROS Melodic installation instructions](https://wiki.ros.org/melodic/Installation)
diff --git a/docs/ko/ros/mavros_offboard_cpp.md b/docs/ko/ros/mavros_offboard_cpp.md
index a575223905..26de1922fa 100644
--- a/docs/ko/ros/mavros_offboard_cpp.md
+++ b/docs/ko/ros/mavros_offboard_cpp.md
@@ -123,7 +123,7 @@ int main(int argc, char **argv)
```
The `mavros_msgs` package contains all of the custom messages required to operate services and topics provided by the MAVROS package.
-All services and topics as well as their corresponding message types are documented in the [mavros wiki](http://wiki.ros.org/mavros).
+All services and topics as well as their corresponding message types are documented in the [mavros wiki](https://wiki.ros.org/mavros).
```cpp
mavros_msgs::State current_state;
@@ -194,7 +194,7 @@ offb_set_mode.request.custom_mode = "OFFBOARD";
```
We set the custom mode to `OFFBOARD`.
-A list of [supported modes](http://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
+A list of [supported modes](https://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
```cpp
mavros_msgs::CommandBool arm_cmd;
diff --git a/docs/ko/ros/mavros_offboard_python.md b/docs/ko/ros/mavros_offboard_python.md
index c8688efac0..23d7028a59 100644
--- a/docs/ko/ros/mavros_offboard_python.md
+++ b/docs/ko/ros/mavros_offboard_python.md
@@ -155,7 +155,7 @@ if __name__ == "__main__":
## Code explanation
The `mavros_msgs` package contains all of the custom messages required to operate services and topics provided by the MAVROS package.
-All services and topics as well as their corresponding message types are documented in the [mavros wiki](http://wiki.ros.org/mavros).
+All services and topics as well as their corresponding message types are documented in the [mavros wiki](https://wiki.ros.org/mavros).
```py
import rospy
@@ -237,7 +237,7 @@ for i in range(100):
```
We prepare the message request used to set the custom mode to `OFFBOARD`.
-A list of [supported modes](http://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
+A list of [supported modes](https://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
```py
offb_set_mode = SetModeRequest()
diff --git a/docs/ko/ros/offboard_control.md b/docs/ko/ros/offboard_control.md
index 2abf0baf88..b17b96abe7 100644
--- a/docs/ko/ros/offboard_control.md
+++ b/docs/ko/ros/offboard_control.md
@@ -40,8 +40,7 @@ Enable MAVLink on the serial port that you connect to the companion computer (se
Example radios include:
- - [Lairdtech RM024](http://www.lairdtech.com/products/rm024)
- - [Digi International XBee Pro](http://www.digi.com/products/xbee-rf-solutions/modules)
+ - [Digi International XBee Pro](https://www.digi.com/products/embedded-systems/digi-xbee/rf-modules/sub-1-ghz-rf-modules)
[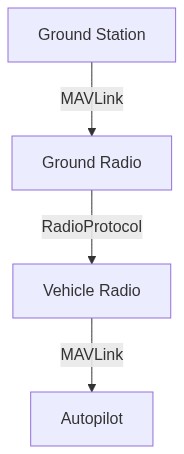](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoiZ3JhcGggVEQ7XG4gIGduZFtHcm91bmQgU3RhdGlvbl0gLS1NQVZMaW5rLS0-IHJhZDFbR3JvdW5kIFJhZGlvXTtcbiAgcmFkMSAtLVJhZGlvUHJvdG9jb2wtLT4gcmFkMltWZWhpY2xlIFJhZGlvXTtcbiAgcmFkMiAtLU1BVkxpbmstLT4gYVtBdXRvcGlsb3RdOyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
@@ -54,7 +53,7 @@ graph TD;
### 온보드 프로세서
-A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ehthernet port.
+A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ethernet port.
There are many possibilities here and it will depend on what kind of additional on-board processing you want to do in addition to sending commands to the autopilot.
Some examples are provided in [Companion Computers](../companion_computer/index.md#companion-computer-options).
diff --git a/docs/ko/ros/raspberrypi_installation.md b/docs/ko/ros/raspberrypi_installation.md
index c0e732e211..6fd41d152a 100644
--- a/docs/ko/ros/raspberrypi_installation.md
+++ b/docs/ko/ros/raspberrypi_installation.md
@@ -5,11 +5,11 @@ Pixhawk 보조 컴퓨터 라즈베리파이에 ROS-indigo를 설치 방법을
## 준비 사항
- 모니터, 키보드 또는 구성된 SSH 연결가능한 라즈베리파이
-- 이 가이드는 라즈베리파이에 Raspbian "JESSIE"가 설치되어 있다고 가정합니다. If not: [install it](https://www.raspberrypi.org/downloads/raspbian/) or [upgrade](http://raspberrypi.stackexchange.com/questions/27858/upgrade-to-raspbian-jessie) your Raspbian Wheezy to Jessie.
+- 이 가이드는 라즈베리파이에 Raspbian "JESSIE"가 설치되어 있다고 가정합니다. If not: [install it](https://www.raspberrypi.org/downloads/raspbian/) or [upgrade](https://raspberrypi.stackexchange.com/questions/27858/upgrade-to-raspbian-jessie) your Raspbian Wheezy to Jessie.
## 설치
-Follow [this guide](http://wiki.ros.org/ROSberryPi/Installing%20ROS%20Indigo%20on%20Raspberry%20Pi) for the actual installation of ROS Indigo. 참고: "ROS-Comm" 변형 버전을 설치하십시오. 데스크탑 변형은 너무 무겁습니다.
+Follow [this guide](https://wiki.ros.org/ROSberryPi/Installing%20ROS%20Indigo%20on%20Raspberry%20Pi) for the actual installation of ROS Indigo. 참고: "ROS-Comm" 변형 버전을 설치하십시오. 데스크탑 변형은 너무 무겁습니다.
### 패키지 설치 중 오류
diff --git a/docs/ko/ros2/index.md b/docs/ko/ros2/index.md
index 2407872a66..d2d842b1b1 100644
--- a/docs/ko/ros2/index.md
+++ b/docs/ko/ros2/index.md
@@ -6,7 +6,7 @@
Tip
The PX4 development team highly recommend that you use/migrate to this version of ROS!
-This is the newest version of [ROS](http://www.ros.org/) (Robot Operating System).
+This is the newest version of [ROS](https://www.ros.org/) (Robot Operating System).
It significantly improves on ROS "1", and in particular allows a much deeper and lower-latency integration with PX4.
:::
diff --git a/docs/ko/ros2/user_guide.md b/docs/ko/ros2/user_guide.md
index 9ba7b6a017..85728c928f 100644
--- a/docs/ko/ros2/user_guide.md
+++ b/docs/ko/ros2/user_guide.md
@@ -444,7 +444,7 @@ The local/world and body frames used by ROS and PX4 are different.
| 전역 | FRD or NED (X **N**orth, Y **E**ast, Z **D**own) | FLU or ENU (X **E**ast, Y **N**orth, Z **U**p) |
:::tip
-See [REP105: Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
+See [REP105: Coordinate Frames for Mobile Platforms](https://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
:::
두 프레임 모두 아래 이미지에 표시됩니다(왼쪽의 FRD/오른쪽의 FLU).
@@ -455,7 +455,6 @@ The FRD (NED) conventions are adopted on **all** PX4 topics unless explicitly sp
Therefore, ROS 2 nodes that want to interface with PX4 must take care of the frames conventions.
- To rotate a vector from ENU to NED two basic rotations must be performed:
-
- first a pi/2 rotation around the `Z`-axis (up),
- then a pi rotation around the `X`-axis (old East/new North).
diff --git a/docs/ko/sensor/lidar_lite.md b/docs/ko/sensor/lidar_lite.md
index 52e4a0c872..d3f8683f64 100644
--- a/docs/ko/sensor/lidar_lite.md
+++ b/docs/ko/sensor/lidar_lite.md
@@ -35,7 +35,7 @@ The I2C interface of non-blue-label Lidar-Lite (v1) devices has stability limita
권장되는 강력한 설정은 PWM 인터페이스를 가진 v1 장치입니다.
:::
-The standard wiring instructions for Lidar-Lite 3 (from the [Operation Manual](http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf)) are shown below.
+The standard wiring instructions for Lidar-Lite 3 (from the [Operation Manual](https://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf)) are shown below.
Lidar-Lite v2와 v3은 커넥터의 핀 순서가 역전된다는 점을 제외하면 동일합니다 (즉, 커넥터가 뒤집힌 것처럼).

@@ -83,4 +83,4 @@ If missing, you would also need to add the driver (`drivers/ll40ls`) to the boar
## 추가 정보
-- [LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf](http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf) (Garmin)
+- [LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf](https://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf) (Garmin)
diff --git a/docs/ko/sensor/pmw3901.md b/docs/ko/sensor/pmw3901.md
index 149f9b811a..d8502a1a00 100644
--- a/docs/ko/sensor/pmw3901.md
+++ b/docs/ko/sensor/pmw3901.md
@@ -55,7 +55,7 @@ The diagram shows the relative board and vehicle orientations that correspond to
위의 다이어그램은 Bitcraze 보드입니다.
노치를 사용하여 같은 방법으로 다른 보드의 방향을 찾을 수 있습니다.
-| | |
+| | |
| ---------------------------------------------------- | ----------------------------------------------------------------------------------------------- |
| Tindie
+
@@ -215,7 +215,7 @@ Pixracer에는 S.PORT와 UART 간의 신호 변환 장치가 포함되어 있지
아래에서 구매 가능합니다.
- [FrSky FUL-1](https://www.frsky-rc.com/product/ful-1/): [unmannedtech.co.uk](https://www.unmannedtechshop.co.uk/frsky-transmitter-receiver-upgrade-adapter-ful-1/)
-- SPC: [getfpv.com](http://www.getfpv.com/frsky-smart-port-converter-cable.html), [unmannedtechshop.co.uk](https://www.unmannedtechshop.co.uk/frsky-smart-port-converter-spc/)
+- SPC: [getfpv.com](https://www.getfpv.com/frsky-smart-port-converter-cable.html), [unmannedtechshop.co.uk](https://www.unmannedtechshop.co.uk/frsky-smart-port-converter-spc/)
다른 보드에서의 연결 방법은 아래에 기술되어 있습니다.
diff --git a/docs/ko/peripherals/gripper_servo.md b/docs/ko/peripherals/gripper_servo.md
index 00626b188d..e1450ef2b5 100644
--- a/docs/ko/peripherals/gripper_servo.md
+++ b/docs/ko/peripherals/gripper_servo.md
@@ -9,7 +9,7 @@ This section explains how to connect and configure a [gripper](../peripherals/gr
The following PWM-connected servos have been tested with PX4:
- [R4-EM-R22-161 push-to-close latch electronic lock](https://southco.com/en_any_int/r4-em-r22-161) (SouthCo)
-- [FluxGrip FG40 electro-permanent magnetic gripper](http://zubax.com/fg40) (Zubax)
+- [FluxGrip FG40 electro-permanent magnetic gripper](https://shop.zubax.com/products/zubax-epm) (Zubax)
## Connecting a PWM-controlled Gripper
diff --git a/docs/ko/peripherals/vesc.md b/docs/ko/peripherals/vesc.md
index 926419301d..59e56712bc 100644
--- a/docs/ko/peripherals/vesc.md
+++ b/docs/ko/peripherals/vesc.md
@@ -55,4 +55,4 @@ See DroneCAN Troubleshooting - (index.md#troubleshooting).
## 추가 정보
- [VESC Project ESCs](https://vesc-project.com/)
-- [Benjamin Vedder's blog](http://vedder.se) (project owner)
+- [Benjamin Vedder's blog](https://vedder.se/) (project owner)
diff --git a/docs/ko/releases/1.12.md b/docs/ko/releases/1.12.md
index 34af2cebe7..9a8f80fe18 100644
--- a/docs/ko/releases/1.12.md
+++ b/docs/ko/releases/1.12.md
@@ -51,9 +51,9 @@
- Pixhawk FMUv6U (Read more about this spec on the [Pixhawk GitHub Repository](https://github.com/pixhawk/Pixhawk-Standards))
- Pixhawk FMUv6X (Read more about this spec on the [Pixhawk GitHub Repository](https://github.com/pixhawk/Pixhawk-Standards))
-- CUAV X7 / X7Pro ([Read more about this product on the manufacturers site](http://www.cuav.net/en/x7en/)]
-- CUAV Nora ([Read more about this product on the manufacturers site](http://www.cuav.net/en/nora/))
-- CUAV CAN GPS ([Read more about this product on the manufacturers site](http://www.cuav.net/en/neo-3-2/))
+- CUAV X7 / X7Pro
+- CUAV Nora
+- CUAV CAN GPS (Neo-3-2)
- SP Racing H7 Extreme ([Read more about this product on the manufacturers site](http://seriouslypro.com/spracingh7extreme))
- Bitcraze Crazyflie v2.1 ([Read more about this product on the manufacturers site](https://www.bitcraze.io/products/crazyflie-2-1/))
- ARK CAN Flow ([Read more about this product on the manufacturers site](https://arkelectron.com/product/ark-flow/))
@@ -81,7 +81,6 @@
### 멀티콥터
- **More intuitive stick feel in Position mode**
-
- 속도 설정값 대신 가속에 매핑된 수평 스틱 입력
- 이동 속도 속도에 도달시의 갑작스런 기울기 변화를 제거합니다.
- 직관적인 단락(예: 착륙시)
@@ -89,7 +88,6 @@
- Development: [First attempt](https://github.com/PX4/PX4-Autopilot/pull/12072), [Introduction](https://github.com/PX4/PX4-Autopilot/pull/16052), [Improvements](https://github.com/PX4/PX4-Autopilot/pull/16320), [Bugfix zero oscillation](https://github.com/PX4/PX4-Autopilot/pull/16786), [Bugfix position unlock](https://github.com/PX4/PX4-Autopilot/pull/16791), [Bugfix invalid setpoint](https://github.com/PX4/PX4-Autopilot/pull/17078), [Bugfix high velocity pre takeoff](https://github.com/PX4/PX4-Autopilot/pull/17437)
- **Hover thrust independent velocity control gains**
-
- Parameters `MPC_{XY/Z}_VEL_{P/I/D}` were replaced with `MPC_{XY/Z}_VEL_{P/I/D}_ACC`, see:
[MPC_XY_VEL_P_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_P_ACC), [MPC_XY_VEL_I_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_I_ACC), [MPC_XY_VEL_D_ACC](../advanced_config/parameter_reference.md#MPC_XY_VEL_D_ACC), [MPC_Z_VEL_P_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_P_ACC), [MPC_Z_VEL_I_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_I_ACC), [MPC_Z_VEL_D_ACC](../advanced_config/parameter_reference.md#MPC_Z_VEL_D_ACC)
@@ -144,7 +142,6 @@ Nuttx was upgraded from [8.2+ to NuttX 10.10.0+](https://github.com/apache/incub
- [**BACKPORT**] stm32:Ethernet Fix too big frames
- **Boot up stability** V5-V6X ensuring the LSE (RTC) oscillator is started
-
- [**BACKPORT**] stm32h7:lse fix Kconfig help text
- [**BACKPORT**] stm32f7:lse Use Kconfig values directly
- [**BACKPORT**] stm32h7:Add DBGMCU
@@ -164,7 +161,6 @@ Nuttx was upgraded from [8.2+ to NuttX 10.10.0+](https://github.com/apache/incub
:::
- **Driver changes**
-
- [**BACKPORT**] drivers/serial: fix Rx interrupt enable for cdcacm
- [**BACKPORT**] binnfmt:Fix return before close ELF fd
diff --git a/docs/ko/releases/1.16.md b/docs/ko/releases/1.16.md
index cdd1b2670c..c5c2b7faf8 100644
--- a/docs/ko/releases/1.16.md
+++ b/docs/ko/releases/1.16.md
@@ -208,7 +208,7 @@ This release contains a major rework for the rover support in PX4:
- Generic Mecanum Rover `52000`.
- Library for the [pure pursuit guidance algorithm](../config_rover/position_tuning.md#pure-pursuit-guidance-logic-info-only) that is shared by all the rover modules.
- [Simulation](../frames_rover/index.md#simulation) for differential-steering and Ackermann rovers in gazebo (for release notes see `r1_rover` and `rover_ackermann` in [simulation](#simulation)).
-- Deprecation of the [rover position control](../frames_rover/rover_position_control.md) module: Note that the legacy rover module still exists but has been superseded by the new dedicated modules.
+- Deprecation of the `rover position control` module: Note that the legacy rover module still exists but has been superseded by the new dedicated modules.
### Infrastructure
diff --git a/docs/ko/ros/external_position_estimation.md b/docs/ko/ros/external_position_estimation.md
index ac971366e7..2dabff3dd3 100644
--- a/docs/ko/ros/external_position_estimation.md
+++ b/docs/ko/ros/external_position_estimation.md
@@ -187,7 +187,7 @@ MAVROS에는 다음 파이프라인을 사용하여 VIO 또는 MoCap 시스템
위의 파이프라인 중 하나를 LPE와 함께 사용할 수 있습니다.
EKF2로 작업하는 경우 "비전" 파이프라인만 지원됩니다.
-To use MoCap data with EKF2 you will have to [remap](http://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
+To use MoCap data with EKF2 you will have to [remap](https://wiki.ros.org/roslaunch/XML/remap) the pose topic that you get from MoCap:
- MoCap ROS topics of type `geometry_msgs/PoseStamped` or `geometry_msgs/PoseWithCovarianceStamped` must be remapped to `/mavros/vision_pose/pose`.
The `geometry_msgs/PoseStamped` topic is most common as MoCap doesn't usually have associated covariances to the data.
@@ -205,7 +205,7 @@ ROS와 PX4에서 사용하는 로컬과 전역 프레임은 같지 않습니다.
| 전역 | FRD or NED (X **N**orth, Y **E**ast, Z **D**own) | FLU or ENU (X **E**ast, Y **N**orth, Z **U**p), with the naming being `odom` or `map` |
:::tip
-See [REP105: Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
+See [REP105: Coordinate Frames for Mobile Platforms](https://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
:::
두 프레임 모두 아래 이미지에 표시됩니다(왼쪽의 FRD/오른쪽의 FLU).
@@ -236,7 +236,7 @@ MAVROS 주행 거리 측정 플러그인은 MAVROS에 의해 알려진 기체의
```
Make sure that you change the values of yaw, pitch and roll such that it properly attaches the external pose's body frame to the `base_link` or `base_link_frd`.
-Have a look at the [tf package](http://wiki.ros.org/tf#static_transform_publisher) for further help on how to specify the transformation between the frames.
+Have a look at the [tf package](https://wiki.ros.org/tf#static_transform_publisher) for further help on how to specify the transformation between the frames.
rviz를 사용하여 프레임을 올바르게 부착했는 지 확인할 수 있습니다. The name of the `external_pose_child_frame` has to match the child_frame_id of your `nav_msgs/Odometry` message.
외부 포즈의 기준 프레임에도 동일하게 적용됩니다. You have to attach the reference frame of the external pose as child to either the `odom` or `odom_frd` frame. 따라서, 다음 코드 줄을 적절하게 조정하십시오.
diff --git a/docs/ko/ros/mavros_installation.md b/docs/ko/ros/mavros_installation.md
index dbce1bf734..a049519917 100644
--- a/docs/ko/ros/mavros_installation.md
+++ b/docs/ko/ros/mavros_installation.md
@@ -7,7 +7,7 @@ The PX4 development team recommend that all users [upgrade to ROS 2](../ros2/ind
This documentation explains how to set up communication between the PX4 Autopilot and a ROS 1 enabled companion computer using MAVROS.
-[MAVROS](http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status) is a ROS 1 package that enables MAVLink extendable communication between computers running ROS 1 for any MAVLink enabled autopilot, ground station, or peripheral.
+[MAVROS](https://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status) is a ROS 1 package that enables MAVLink extendable communication between computers running ROS 1 for any MAVLink enabled autopilot, ground station, or peripheral.
_MAVROS_ is the "official" supported bridge between ROS 1 and the MAVLink protocol.
First we install PX4 and ROS, and then MAVROS.
@@ -26,10 +26,9 @@ They cover the _ROS Melodic and Noetic_ releases.
:::tab ROS Noetic (Ubuntu 20.04)
-If you're working with [ROS Noetic](http://wiki.ros.org/noetic) on Ubuntu 20.04:
+If you're working with [ROS Noetic](https://wiki.ros.org/noetic) on Ubuntu 20.04:
1. Install PX4 without the simulator toolchain:
-
1. [Download PX4 Source Code](../dev_setup/building_px4.md):
```sh
@@ -52,7 +51,7 @@ If you're working with [ROS Noetic](http://wiki.ros.org/noetic) on Ubuntu 20.04:
sudo apt-get install protobuf-compiler libeigen3-dev libopencv-dev -y
```
-3. Follow the [Noetic Installation instructions](http://wiki.ros.org/noetic/Installation/Ubuntu#Installation) (ros-noetic-desktop-full is recommended).
+3. Follow the [Noetic Installation instructions](https://wiki.ros.org/noetic/Installation/Ubuntu#Installation) (ros-noetic-desktop-full is recommended).
:::
@@ -81,7 +80,7 @@ If you're working with ROS "Melodic on Ubuntu 18.04:
- ROS Melodic is installed with Gazebo (Classic) 9 by default.
- Your catkin (ROS build system) workspace is created at **~/catkin_ws/**.
- - The script uses instructions from the ROS Wiki "Melodic" [Ubuntu page](http://wiki.ros.org/melodic/Installation/Ubuntu).
+ - The script uses instructions from the ROS Wiki "Melodic" [Ubuntu page](https://wiki.ros.org/melodic/Installation/Ubuntu).
:::
@@ -147,7 +146,6 @@ Now you are ready to do the build:
```
2. 릴리스 또는 최신 버전을 사용하여 소스에서 MAVROS를 설치합니다.
-
- 출시/안정
```sh
@@ -205,6 +203,6 @@ If you have an example app using the PX4 Autopilot and MAVROS, we can help you g
## See Also
-- [mavros ROS Package Summary](http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status)
+- [mavros ROS Package Summary](https://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status)
- [mavros source](https://github.com/mavlink/mavros/)
-- [ROS Melodic installation instructions](http://wiki.ros.org/melodic/Installation)
+- [ROS Melodic installation instructions](https://wiki.ros.org/melodic/Installation)
diff --git a/docs/ko/ros/mavros_offboard_cpp.md b/docs/ko/ros/mavros_offboard_cpp.md
index a575223905..26de1922fa 100644
--- a/docs/ko/ros/mavros_offboard_cpp.md
+++ b/docs/ko/ros/mavros_offboard_cpp.md
@@ -123,7 +123,7 @@ int main(int argc, char **argv)
```
The `mavros_msgs` package contains all of the custom messages required to operate services and topics provided by the MAVROS package.
-All services and topics as well as their corresponding message types are documented in the [mavros wiki](http://wiki.ros.org/mavros).
+All services and topics as well as their corresponding message types are documented in the [mavros wiki](https://wiki.ros.org/mavros).
```cpp
mavros_msgs::State current_state;
@@ -194,7 +194,7 @@ offb_set_mode.request.custom_mode = "OFFBOARD";
```
We set the custom mode to `OFFBOARD`.
-A list of [supported modes](http://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
+A list of [supported modes](https://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
```cpp
mavros_msgs::CommandBool arm_cmd;
diff --git a/docs/ko/ros/mavros_offboard_python.md b/docs/ko/ros/mavros_offboard_python.md
index c8688efac0..23d7028a59 100644
--- a/docs/ko/ros/mavros_offboard_python.md
+++ b/docs/ko/ros/mavros_offboard_python.md
@@ -155,7 +155,7 @@ if __name__ == "__main__":
## Code explanation
The `mavros_msgs` package contains all of the custom messages required to operate services and topics provided by the MAVROS package.
-All services and topics as well as their corresponding message types are documented in the [mavros wiki](http://wiki.ros.org/mavros).
+All services and topics as well as their corresponding message types are documented in the [mavros wiki](https://wiki.ros.org/mavros).
```py
import rospy
@@ -237,7 +237,7 @@ for i in range(100):
```
We prepare the message request used to set the custom mode to `OFFBOARD`.
-A list of [supported modes](http://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
+A list of [supported modes](https://wiki.ros.org/mavros/CustomModes#PX4_native_flight_stack) is available for reference.
```py
offb_set_mode = SetModeRequest()
diff --git a/docs/ko/ros/offboard_control.md b/docs/ko/ros/offboard_control.md
index 2abf0baf88..b17b96abe7 100644
--- a/docs/ko/ros/offboard_control.md
+++ b/docs/ko/ros/offboard_control.md
@@ -40,8 +40,7 @@ Enable MAVLink on the serial port that you connect to the companion computer (se
Example radios include:
- - [Lairdtech RM024](http://www.lairdtech.com/products/rm024)
- - [Digi International XBee Pro](http://www.digi.com/products/xbee-rf-solutions/modules)
+ - [Digi International XBee Pro](https://www.digi.com/products/embedded-systems/digi-xbee/rf-modules/sub-1-ghz-rf-modules)
[](https://mermaid-js.github.io/mermaid-live-editor/#/edit/eyJjb2RlIjoiZ3JhcGggVEQ7XG4gIGduZFtHcm91bmQgU3RhdGlvbl0gLS1NQVZMaW5rLS0-IHJhZDFbR3JvdW5kIFJhZGlvXTtcbiAgcmFkMSAtLVJhZGlvUHJvdG9jb2wtLT4gcmFkMltWZWhpY2xlIFJhZGlvXTtcbiAgcmFkMiAtLU1BVkxpbmstLT4gYVtBdXRvcGlsb3RdOyIsIm1lcm1haWQiOnsidGhlbWUiOiJkZWZhdWx0In0sInVwZGF0ZUVkaXRvciI6ZmFsc2V9)
@@ -54,7 +53,7 @@ graph TD;
### 온보드 프로세서
-A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ehthernet port.
+A small computer mounted onto the vehicle, connected to the autopilot through a serial port or Ethernet port.
There are many possibilities here and it will depend on what kind of additional on-board processing you want to do in addition to sending commands to the autopilot.
Some examples are provided in [Companion Computers](../companion_computer/index.md#companion-computer-options).
diff --git a/docs/ko/ros/raspberrypi_installation.md b/docs/ko/ros/raspberrypi_installation.md
index c0e732e211..6fd41d152a 100644
--- a/docs/ko/ros/raspberrypi_installation.md
+++ b/docs/ko/ros/raspberrypi_installation.md
@@ -5,11 +5,11 @@ Pixhawk 보조 컴퓨터 라즈베리파이에 ROS-indigo를 설치 방법을
## 준비 사항
- 모니터, 키보드 또는 구성된 SSH 연결가능한 라즈베리파이
-- 이 가이드는 라즈베리파이에 Raspbian "JESSIE"가 설치되어 있다고 가정합니다. If not: [install it](https://www.raspberrypi.org/downloads/raspbian/) or [upgrade](http://raspberrypi.stackexchange.com/questions/27858/upgrade-to-raspbian-jessie) your Raspbian Wheezy to Jessie.
+- 이 가이드는 라즈베리파이에 Raspbian "JESSIE"가 설치되어 있다고 가정합니다. If not: [install it](https://www.raspberrypi.org/downloads/raspbian/) or [upgrade](https://raspberrypi.stackexchange.com/questions/27858/upgrade-to-raspbian-jessie) your Raspbian Wheezy to Jessie.
## 설치
-Follow [this guide](http://wiki.ros.org/ROSberryPi/Installing%20ROS%20Indigo%20on%20Raspberry%20Pi) for the actual installation of ROS Indigo. 참고: "ROS-Comm" 변형 버전을 설치하십시오. 데스크탑 변형은 너무 무겁습니다.
+Follow [this guide](https://wiki.ros.org/ROSberryPi/Installing%20ROS%20Indigo%20on%20Raspberry%20Pi) for the actual installation of ROS Indigo. 참고: "ROS-Comm" 변형 버전을 설치하십시오. 데스크탑 변형은 너무 무겁습니다.
### 패키지 설치 중 오류
diff --git a/docs/ko/ros2/index.md b/docs/ko/ros2/index.md
index 2407872a66..d2d842b1b1 100644
--- a/docs/ko/ros2/index.md
+++ b/docs/ko/ros2/index.md
@@ -6,7 +6,7 @@
Tip
The PX4 development team highly recommend that you use/migrate to this version of ROS!
-This is the newest version of [ROS](http://www.ros.org/) (Robot Operating System).
+This is the newest version of [ROS](https://www.ros.org/) (Robot Operating System).
It significantly improves on ROS "1", and in particular allows a much deeper and lower-latency integration with PX4.
:::
diff --git a/docs/ko/ros2/user_guide.md b/docs/ko/ros2/user_guide.md
index 9ba7b6a017..85728c928f 100644
--- a/docs/ko/ros2/user_guide.md
+++ b/docs/ko/ros2/user_guide.md
@@ -444,7 +444,7 @@ The local/world and body frames used by ROS and PX4 are different.
| 전역 | FRD or NED (X **N**orth, Y **E**ast, Z **D**own) | FLU or ENU (X **E**ast, Y **N**orth, Z **U**p) |
:::tip
-See [REP105: Coordinate Frames for Mobile Platforms](http://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
+See [REP105: Coordinate Frames for Mobile Platforms](https://www.ros.org/reps/rep-0105.html) for more information about ROS frames.
:::
두 프레임 모두 아래 이미지에 표시됩니다(왼쪽의 FRD/오른쪽의 FLU).
@@ -455,7 +455,6 @@ The FRD (NED) conventions are adopted on **all** PX4 topics unless explicitly sp
Therefore, ROS 2 nodes that want to interface with PX4 must take care of the frames conventions.
- To rotate a vector from ENU to NED two basic rotations must be performed:
-
- first a pi/2 rotation around the `Z`-axis (up),
- then a pi rotation around the `X`-axis (old East/new North).
diff --git a/docs/ko/sensor/lidar_lite.md b/docs/ko/sensor/lidar_lite.md
index 52e4a0c872..d3f8683f64 100644
--- a/docs/ko/sensor/lidar_lite.md
+++ b/docs/ko/sensor/lidar_lite.md
@@ -35,7 +35,7 @@ The I2C interface of non-blue-label Lidar-Lite (v1) devices has stability limita
권장되는 강력한 설정은 PWM 인터페이스를 가진 v1 장치입니다.
:::
-The standard wiring instructions for Lidar-Lite 3 (from the [Operation Manual](http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf)) are shown below.
+The standard wiring instructions for Lidar-Lite 3 (from the [Operation Manual](https://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf)) are shown below.
Lidar-Lite v2와 v3은 커넥터의 핀 순서가 역전된다는 점을 제외하면 동일합니다 (즉, 커넥터가 뒤집힌 것처럼).

@@ -83,4 +83,4 @@ If missing, you would also need to add the driver (`drivers/ll40ls`) to the boar
## 추가 정보
-- [LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf](http://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf) (Garmin)
+- [LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf](https://static.garmin.com/pumac/LIDAR_Lite_v3_Operation_Manual_and_Technical_Specifications.pdf) (Garmin)
diff --git a/docs/ko/sensor/pmw3901.md b/docs/ko/sensor/pmw3901.md
index 149f9b811a..d8502a1a00 100644
--- a/docs/ko/sensor/pmw3901.md
+++ b/docs/ko/sensor/pmw3901.md
@@ -55,7 +55,7 @@ The diagram shows the relative board and vehicle orientations that correspond to
위의 다이어그램은 Bitcraze 보드입니다.
노치를 사용하여 같은 방법으로 다른 보드의 방향을 찾을 수 있습니다.
-| | |
+| | |
| ---------------------------------------------------- | ----------------------------------------------------------------------------------------------- |
| Tindie
![PMW3901 Tindie Notch][tindie_notch] | Hex Hereflow
![PMW3901 Hereflow Notch][hereflow_notch] |
| Thone
![PMW3901 Thoneflow Notch][thoneflow_notch] | Alientek (also has an arrow indicating the front!)
![PMW3901 Alientek Notch][alientek_notch] |
@@ -150,7 +150,7 @@ A screenshot showing the I2C pins (SLA, SLC, GND, and VCC) is provided below.
## Hex HereFlow PMW3901 광류 센서
-The Hex [HereFlow PMW3901 Optical Flow Sensor](http://www.proficnc.com/all-products/185-pixhawk2-suite.html) is a tiny board containing the PMW3901 flow module, VL53L1X distance sensor, and an IMU (used to synchronize the flow data with the gyro data).
+The Hex [HereFlow PMW3901 Optical Flow Sensor](https://docs.cubepilot.org/user-guides/flow-senor/here-flow) is a tiny board containing the PMW3901 flow module, VL53L1X distance sensor, and an IMU (used to synchronize the flow data with the gyro data).
An onboard microcontroller samples the three sensors and publishes two DroneCAN messages containing all the information needed for the flow and distance sensor calculations.
@@ -160,9 +160,7 @@ As for the other optical flow boards, we recommend that you use an [external dis
[PX4 configuration](#px4-configuration) and [mounting/orientation](#mounting-orientation) instructions are provided above.
-
-
-### DroneCAN Wiring/Setup
+### DroneCAN Wiring/Setup {#dronecan_wiring}
아래의 다이어그램은 센서를 Pixhawk 4 CAN 버스에 연결하는 방법을 보여줍니다.
diff --git a/docs/ko/sensor/sfxx_lidar.md b/docs/ko/sensor/sfxx_lidar.md
index 645573d342..8d0abeb0ae 100644
--- a/docs/ko/sensor/sfxx_lidar.md
+++ b/docs/ko/sensor/sfxx_lidar.md
@@ -20,13 +20,13 @@ Discontinued
The following models are supported by PX4 but are no longer available from the manufacturer.
-| 모델 | 범위 | 버스 | |
-| -------------------------------------------------------------------------------------------------- | ---- | ------------ | ------------------------------------------------------ |
-| [SF02](http://documents.lightware.co.za/SF02%20-%20Laser%20Rangefinder%20Manual%20-%20Rev%208.pdf) | 50 | 직렬 | |
-| [SF10/A](http://documents.lightware.co.za/SF10%20-%20Laser%20Altimeter%20Manual%20-%20Rev%206.pdf) | 25 | 직렬 또는 I2C 버스 | |
-| [SF10/B](http://documents.lightware.co.za/SF10%20-%20Laser%20Altimeter%20Manual%20-%20Rev%206.pdf) | 50 | 직렬 또는 I2C 버스 | |
-| SF10/C | 100m | 직렬 또는 I2C 버스 | |
-| LW20/B | 50 | I2C 버스 | 감지 및 회피 애플리케이션을 위한 서보가 있는 방수 (IP67) |
+| 모델 | 범위 | 버스 | |
+| --------------------------------------------------------------------------------------------------- | ---- | ------------ | ------------------------------------------------------ |
+| [SF02](https://documents.lightware.co.za/SF02%20-%20Laser%20Rangefinder%20Manual%20-%20Rev%208.pdf) | 50 | 직렬 | |
+| [SF10/A](https://documents.lightware.co.za/SF10%20-%20Laser%20Altimeter%20Manual%20-%20Rev%206.pdf) | 25 | 직렬 또는 I2C 버스 | |
+| [SF10/B](https://documents.lightware.co.za/SF10%20-%20Laser%20Altimeter%20Manual%20-%20Rev%206.pdf) | 50 | 직렬 또는 I2C 버스 | |
+| SF10/C | 100m | 직렬 또는 I2C 버스 | |
+| LW20/B | 50 | I2C 버스 | 감지 및 회피 애플리케이션을 위한 서보가 있는 방수 (IP67) |
:::
diff --git a/docs/ko/sim_flightgear/index.md b/docs/ko/sim_flightgear/index.md
index cd6dce869b..80de0eb9a7 100644
--- a/docs/ko/sim_flightgear/index.md
+++ b/docs/ko/sim_flightgear/index.md
@@ -7,8 +7,8 @@ It may or may not work with current versions of PX4.
See [Toolchain Installation](../dev_setup/dev_env.md) for information about the environments and tools supported by the core development team.
:::
-[FlightGear](https://www.flightgear.org/) is a flight simulator with powerful [FDM engines](http://wiki.flightgear.org/Flight_Dynamics_Model).
-This allows FlightGear to simulate rotorcrafts under various meteorological conditions (which is why the bridge was originally developed by [ThunderFly s.r.o.](https://www.thunderfly.cz/)).
+[FlightGear](https://wiki.flightgear.org/Flight_Dynamics_Model) is a flight simulator with powerful [FDM engines](https://wiki.flightgear.org/Flight_Dynamics_Model).
+This allows FlightGear to simulate rotorcraft under various meteorological conditions (which is why the bridge was originally developed by [ThunderFly s.r.o.](https://www.thunderfly.cz/)).
This page describes FlightGear's single-vehicle use in SITL.
For information about multi-vehicle use see: [Multi-Vehicle Simulation with FlightGear](../sim_flightgear/multi_vehicle.md).
@@ -191,7 +191,7 @@ Takeoff location in SITL FlightGear can be set using additional variables.
Setting the variable will override the default takeoff location.
The variables which can be set are as follows: `--airport`, `--runway`, and `--offset-distance`.
-Other options can be found on [FlightGear wiki](http://wiki.flightgear.org/Command_line_options#Initial_Position_and_Orientation)
+Other options can be found on [FlightGear wiki](https://wiki.flightgear.org/Command_line_options#Initial_Position_and_Orientation)
예:
@@ -199,7 +199,7 @@ Other options can be found on [FlightGear wiki](http://wiki.flightgear.org/Comma
FG_ARGS_EX="--airport=PHNL" make px4_sitl_nolockstep flightgear_rascal
```
-The example above starts the simulation on the [Honolulu international airport](http://wiki.flightgear.org/Suggested_airports)
+The example above starts the simulation on the [Honolulu international airport](https://wiki.flightgear.org/Suggested_airports)
### Using a Joystick
diff --git a/docs/ko/sim_flightgear/vehicles.md b/docs/ko/sim_flightgear/vehicles.md
index b3c6097b37..0dcf1e4648 100644
--- a/docs/ko/sim_flightgear/vehicles.md
+++ b/docs/ko/sim_flightgear/vehicles.md
@@ -25,7 +25,7 @@ The most suitable one for UAV development is currently the [Rascal RC plane](htt

-The variants differ mainly by the [FDM](http://wiki.flightgear.org/Flight_Dynamics_Model) model.
+The variants differ mainly by the [FDM](https://wiki.flightgear.org/Flight_Dynamics_Model) model.
All variants have a common feature selection table that can be activated by pressing the `=` key on the computer keyboard.
There is a pop-up table that could be used for advanced features activation.
@@ -119,7 +119,7 @@ The file content meaning is as follows:
- `FgModel` - a precise case sensitive name of the FlightGear model corresponding to "XXXX-set.xml" in the model directory (where XXXX is the model name).
- `Url` is optional and it is not currently used. It is intended for future use to auto-download the models from web
-- `Controls` - the most important part of the process of adding a vehicle. This section contains the mapping between the PX4 mixer file and [FlightGear property tree](http://wiki.flightgear.org/Property_tree).
+- `Controls` - the most important part of the process of adding a vehicle. This section contains the mapping between the PX4 mixer file and [FlightGear property tree](https://wiki.flightgear.org/Property_tree).
- The first number in a list selects a PX4 mixer output.
- Path string is a FlightGear variable location in the property tree.
- The last number in a list is a multiplier, allowing inversion or scaling of mixer input.
diff --git a/docs/ko/sim_gazebo_classic/index.md b/docs/ko/sim_gazebo_classic/index.md
index 7d10df6f4f..eae55aa262 100644
--- a/docs/ko/sim_gazebo_classic/index.md
+++ b/docs/ko/sim_gazebo_classic/index.md
@@ -46,8 +46,6 @@ Note that `aptitude` is needed because it can resolve dependency conflicts (by r
:::tip
You could also modify the installation script to install Gazebo Classic on Ubuntu 22.04 before it is run for the first time.
-
-Additional installation instructions can be found on [gazebosim.org](http://gazebosim.org/tutorials?cat=guided_b&tut=guided_b1).
:::
## Running the Simulation
@@ -120,7 +118,7 @@ INFO [simulator] Waiting for simulator to connect on TCP port 4560
Gazebo multi-robot simulator, version 9.0.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
-http://gazebosim.org
+https://gazebosim.org/home
...
INFO [ecl/EKF] 5188000: commencing GPS fusion
```
diff --git a/docs/ko/sim_gazebo_classic/multi_vehicle_simulation.md b/docs/ko/sim_gazebo_classic/multi_vehicle_simulation.md
index 02375be055..1a53ef0973 100644
--- a/docs/ko/sim_gazebo_classic/multi_vehicle_simulation.md
+++ b/docs/ko/sim_gazebo_classic/multi_vehicle_simulation.md
@@ -108,7 +108,7 @@ You can then control the vehicles with _QGroundControl_ and MAVROS in a similar
### Required
-- Current [PX4 ROS/Gazebo development environment](../ros/mavros_installation.md) (which includes the [MAVROS package](http://wiki.ros.org/mavros)).
+- Current [PX4 ROS/Gazebo development environment](../ros/mavros_installation.md) (which includes the [MAVROS package](https://wiki.ros.org/mavros)).
- a clone of latest [PX4/PX4-Autopilot](https://github.com/PX4/PX4-Autopilot)
### Build and Test
@@ -234,7 +234,6 @@ To add a third iris to this simulation there are two main components to consider
- select a different port for `mavlink_udp_port` arg for communication with Gazebo Classic
- selects ports for MAVROS communication by modifying both port numbers in the `fcu_url` arg
- create a startup file, and change the file as follows:
-
- make a copy of an existing iris rcS startup file (`iris_1` or `iris_2`) and rename it `iris_3`
- `MAV_SYS_ID` value to `3`
- `SITL_UDP_PRT` value to match that of the `mavlink_udp_port` launch file arg
@@ -275,7 +274,6 @@ This method is similar to using the xacro except that the SITL/Gazebo Classic po
To add a new vehicle, you need to make sure the model can be found (in order to spawn it in Gazebo Classic), and PX4 needs to have an appropriate corresponding startup script.
1. You can choose to do either of:
-
- modify the **single_vehicle_spawn_sdf.launch** file to point to the location of your model by changing the line below to point to your model:
```sh
@@ -298,5 +296,5 @@ To add a new vehicle, you need to make sure the model can be found (in order to
## Additional Resources
- See [Simulation](../simulation/index.md) for a description of the UDP port configuration.
-- See [URDF in Gazebo](http://wiki.ros.org/urdf/Tutorials/Using%20a%20URDF%20in%20Gazebo) for more information about spawning the model with xacro.
+- See [URDF in Gazebo](https://wiki.ros.org/urdf/Tutorials/Using%20a%20URDF%20in%20Gazebo) for more information about spawning the model with xacro.
- See [RotorS](https://github.com/ethz-asl/rotors_simulator/tree/master/rotors_description/urdf) for more xacro models.
diff --git a/docs/ko/sim_gazebo_classic/octomap.md b/docs/ko/sim_gazebo_classic/octomap.md
index 8f7ab34aa7..8d844ca849 100644
--- a/docs/ko/sim_gazebo_classic/octomap.md
+++ b/docs/ko/sim_gazebo_classic/octomap.md
@@ -1,6 +1,6 @@
# OctoMap 3D Models with ROS/Gazebo Classic
-The [OctoMap library](http://octomap.github.io/) is an open source library for generating volumetric 3D environment models from sensor data.
+The [OctoMap library](https://octomap.github.io/) is an open source library for generating volumetric 3D environment models from sensor data.
This model data can then be used by a drone for navigation and obstacle avoidance.
This guide covers how to use _OctoMap_ with the [Gazebo Classic](../sim_gazebo_classic/index.md) [Rotors Simulator](https://github.com/ethz-asl/rotors_simulator/wiki/RotorS-Simulator) and ROS.
diff --git a/docs/ko/sim_jsbsim/index.md b/docs/ko/sim_jsbsim/index.md
index c5f1a8599a..eb6e1b3d88 100644
--- a/docs/ko/sim_jsbsim/index.md
+++ b/docs/ko/sim_jsbsim/index.md
@@ -7,7 +7,7 @@ It may or may not work with current versions of PX4.
See [Toolchain Installation](../dev_setup/dev_env.md) for information about the environments and tools supported by the core development team.
:::
-[JSBSim](http://jsbsim.sourceforge.net/index.html) is a open source flight simulator ("flight dynamics model (FDM)") that runs on Microsoft Windows, Apple Macintosh, Linux, IRIX, Cygwin (Unix on Windows), etc.
+[JSBSim](https://jsbsim.sourceforge.net/index.html) is a open source flight simulator ("flight dynamics model (FDM)") that runs on Microsoft Windows, Apple Macintosh, Linux, IRIX, Cygwin (Unix on Windows), etc.
Its features include: fully configurable aerodynamics and a propulsion system that can model complex flight dynamics of an aircraft.
Rotational earth effects are also modeled into the dynamics.
diff --git a/docs/ko/sim_sih/index.md b/docs/ko/sim_sih/index.md
index 254896a26f..3ce3d90521 100644
--- a/docs/ko/sim_sih/index.md
+++ b/docs/ko/sim_sih/index.md
@@ -23,10 +23,11 @@ The Desktop computer is only used to display the virtual vehicle.
### 호환성
- SIH is compatible with all PX4 supported boards except those based on FMUv2.
-- SIH for quadrotor is supported from PX4 v1.9.
-- SIH for fixed-wing (airplane) and VTOL tailsitter are supported from PX4 v1.13.
+- SIH for MC quadrotor is supported from PX4 v1.9.
+- SIH for FW (airplane) and VTOL tailsitter are supported from PX4 v1.13.
- SIH as SITL (without hardware) from PX4 v1.14.
- SIH for Standard VTOL from PX4 v1.16.
+- SIH for MC Hexacopter X from `main` (expected to be PX4 v1.17).
### Benefits
@@ -43,12 +44,90 @@ SIH provides several benefits over HITL:
To run the SIH, you will need a:
-- [Flight controller](../flight_controller/index.md), such as a Pixhawk-series board
+- [Flight controller](../flight_controller/index.md), such as a Pixhawk-series board.
+
+ ::: info
+ From PX4 v1.14 you can run [SIH "as SITL"](#sih-as-sitl-no-fc), in which case a flight controller is not required.
+
+:::
+
- [Manual controller](../getting_started/px4_basic_concepts.md#manual-control): either a [radio control system](../getting_started/rc_transmitter_receiver.md) or a [joystick](../config/joystick.md).
+
- QGroundControl for flying the vehicle via GCS.
+
- Development computer for visualizing the virtual vehicle (optional).
-From PX4 v1.14 you can run SIH "as SITL", in which case a flight controller is not required.
+## Check if SIH is in Firmware
+
+The modules required for SIH are built into most PX4 firmware by default.
+These include: [`pwm_out_sim`](../modules/modules_driver.md#pwm-out-sim), [`sensor_baro_sim`](../modules/modules_system.md#sensor-baro-sim), [`sensor_gps_sim`](../modules/modules_system.md#sensor-gps-sim) and [`sensor_mag_sim`](../modules/modules_system.md#sensor-mag-sim).
+
+To check that these are present on your flight controller:
+
+1. Start QGroundControl.
+
+2. Open **Analyze Tools > Mavlink Console**.
+
+3. Enter the following commands in the console:
+
+ ```sh
+ pwm_out_sim status
+ ```
+
+ ```sh
+ sensor_baro_sim status
+ ```
+
+ ```sh
+ sensor_gps_sim status
+ ```
+
+ ```sh
+ sensor_mag_sim status
+ ```
+
+ ::: tip
+ Note that when using SIH on real hardware you do not need to additionally enable the modules using their corresponding parameters ([SENS_EN_GPSSIM](../advanced_config/parameter_reference.md#SENS_EN_GPSSIM), [SENS_EN_BAROSIM](../advanced_config/parameter_reference.md#SENS_EN_BAROSIM), [SENS_EN_MAGSIM](../advanced_config/parameter_reference.md#SENS_EN_MAGSIM)).
+
+:::
+
+4. If a valid status is returned you can start using SIH.
+
+If any of the returned values above are `nsh: MODULENAME: command not found`, then you don't have the module installed.
+In this case you will have to add them to your board configuration and then rebuild and install the firmware.
+
+### Adding SIH to the Firmware
+
+Add the following key to the configuration file for your flight controller to include all the required modules (for an example see [boards/px4/fmu-v6x/default.px4board](https://github.com/PX4/PX4-Autopilot/blob/main/boards/px4/fmu-v6x/default.px4board)).
+Then re-build the firmware and flash it to the board.
+
+```text
+CONFIG_MODULES_SIMULATION_SIMULATOR_SIH=y
+```
+
+:::details
+What does this do?
+
+This installs the dependencies in [simulator_sih/Kconfig](https://github.com/PX4/PX4-Autopilot/blob/main/src/modules/simulation/simulator_sih/Kconfig).
+It is equivalent to:
+
+```text
+CONFIG_MODULES_SIMULATION_PWM_OUT_SIM=y
+CONFIG_MODULES_SIMULATION_SENSOR_BARO_SIM=y
+CONFIG_MODULES_SIMULATION_SENSOR_GPS_SIM=y
+CONFIG_MODULES_SIMULATION_SENSOR_MAG_SIM=y
+```
+
+:::
+
+As an alterative to updating configuration files manually, you can use the following command to launch a GUI configuration tool, and interactively enable the required modules at the path: **modules > Simulation > simulator_sih**.
+For example, to update the fmu-v6x configuration you would use:
+
+```sh
+make px4_fmu-v6x boardconfig
+```
+
+After uploading, check that the required modules are present.
## Starting SIH
@@ -58,7 +137,7 @@ To set up/start SIH:
2. Open QGroundControl and wait for the flight controller too boot and connect.
3. Open [Vehicle Setup > Airframe](../config/airframe.md) then select the desired frame:
- [SIH Quadcopter X](../airframes/airframe_reference.md#copter_simulation_sih_quadcopter_x)
- - SIH Hexacopter X currently only has an airframe for SITL to safe flash so on flight control hardware it has to be manually configured equivalently.
+ - **SIH Hexacopter X** (currently only has an airframe for SITL to safe flash so on flight control hardware it has to be manually configured equivalently).
- [SIH plane AERT](../airframes/airframe_reference.md#plane_simulation_sih_plane_aert)
- [SIH Tailsitter Duo](../airframes/airframe_reference.md#vtol_simulation_sih_tailsitter_duo)
- [SIH Standard VTOL QuadPlane](../airframes/airframe_reference.md#vtol_simulation_sih_standard_vtol_quadplane)
@@ -116,7 +195,6 @@ To run SIH as SITL:
1. Install the [PX4 Development toolchain](../dev_setup/dev_env.md).
2. Run the appropriate make command for each vehicle type (at the root of the PX4-Autopilot repository):
-
- Quadcopter
```sh
@@ -242,7 +320,7 @@ For specific examples see the `_sihsim_` airframes in [ROMFS/px4fmu_common/init.
The dynamic models for the various vehicles are:
-- Quadcopter: [pdf report](https://github.com/PX4/PX4-user_guide/raw/main/assets/simulation/SIH_dynamic_model.pdf).
+- Quadcopter: [pdf report](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/simulation/SIH_dynamic_model.pdf).
- Hexacopter: Equivalent to the Quadcopter but with a symmetric hexacopter x actuation setup.
- Fixed-wing: Inspired by the PhD thesis: "Dynamics modeling of agile fixed-wing unmanned aerial vehicles." Khan, Waqas, supervised by Nahon, Meyer, McGill University, PhD thesis, 2016.
- Tailsitter: Inspired by the master's thesis: "Modeling and control of a flying wing tailsitter unmanned aerial vehicle." Chiappinelli, Romain, supervised by Nahon, Meyer, McGill University, Masters thesis, 2018.
@@ -257,7 +335,9 @@ SIH was originally developed by Coriolis g Corporation.
The airplane model and tailsitter models were added by Altitude R&D inc.
Both are Canadian companies:
-- Coriolis g developped a new type of Vertical Takeoff and Landing (VTOL) vehicles based on passive coupling systems;
+- Coriolis g developed a new type of Vertical Takeoff and Landing (VTOL) vehicles based on passive coupling systems;
- [Altitude R&D](https://www.altitude-rd.com/) is specialized in dynamics, control, and real-time simulation (today relocated in Zurich).
The simulator is released for free under BSD license.
+
+
diff --git a/docs/ko/simulation/community_supported_simulators.md b/docs/ko/simulation/community_supported_simulators.md
index 0cfea9b84f..459e3daa57 100644
--- a/docs/ko/simulation/community_supported_simulators.md
+++ b/docs/ko/simulation/community_supported_simulators.md
@@ -18,4 +18,4 @@ Questions about these tools should be raised on the [discussion forums](../contr
| [FlightGear](../sim_flightgear/index.md) | A simulator that provides physically and visually realistic simulations. In particular it can simulate many weather conditions, including thunderstorms, snow, rain and hail, and can also simulate thermals and different types of atmospheric flows. [Multi-vehicle simulation](../sim_flightgear/multi_vehicle.md) is also supported.
Supported Vehicles: Plane, Autogyro, Rover
|
| [JMAVSim](../sim_jmavsim/index.md) | A simple multirotor/quad simulator. This was previously part of the PX4 development toolchain but was removed in favour of [Gazebo](../sim_gazebo_gz/index.md).
Supported Vehicles: Quad
|
| [JSBSim](../sim_jsbsim/index.md) | A simulator that provides advanced flight dynamics models. This can be used to model realistic flight dynamics based on wind tunnel data.
Supported Vehicles: Plane, Quad, Hex
|
-| [AirSim](../sim_airsim/index.md) | A cross platform simulator that provides physically and visually realistic simulations. This simulator is resource intensive, and requires a very significantly more powerful computer than the other simulators described here.
Supported Vehicles: Iris (MultiRotor model and a configuration for PX4 QuadRotor in the X configuration).
|
+| [AirSim](../sim_airsim/index.md) | A cross platform simulator that provides physically and visually realistic simulations. This simulator is resource intensive, and requires a significantly more powerful computer than the other simulators described here.
Supported Vehicles: Iris (MultiRotor model and a configuration for PX4 QuadRotor in the X configuration).
|
diff --git a/docs/ko/simulation/hitl.md b/docs/ko/simulation/hitl.md
index 6d97d42e81..286cc56354 100644
--- a/docs/ko/simulation/hitl.md
+++ b/docs/ko/simulation/hitl.md
@@ -22,7 +22,6 @@ The set of compatible airframes vs simulators is:
| ---------------------------------------------------------------------------------------------------------------- | --------------- | -------------- | ------- |
| [HIL Quadcopter X](../airframes/airframe_reference.md#copter_simulation_hil_quadcopter_x) | 1001 | Y | Y |
| [HIL Standard VTOL QuadPlane](../airframes/airframe_reference.md#vtol_standard_vtol_hil_standard_vtol_quadplane) | 1002 | Y | |
-| [Generic Quadrotor x](../airframes/airframe_reference.md#copter_quadrotor_x_generic_quadcopter) copter | 4001 | Y | Y |
@@ -34,7 +33,7 @@ The simulator acts as gateway to share MAVLink data between PX4 and _QGroundCont
:::info
The simulator can also be connected via UDP if the flight controller has networking support and uses a stable, low-latency connection (e.g. a wired Ethernet connection - WiFi is usually not sufficiently reliable).
-For example, this configuration has been tested with PX4 running on a Raspberry Pi connected via Ethernet to the computer (a startup configuration that includes the command for running jMAVSim can be found [here](https://github.com/PX4/PX4-Autopilot/blob/main/posix-configs/rpi/px4_hil.config)).
+For example, this configuration has been tested with PX4 running on a Raspberry Pi connected via Ethernet to the computer (a startup configuration that includes the command for running jMAVSim can be found in [px4_hil.config](https://github.com/PX4/PX4-Autopilot/blob/main/posix-configs/rpi/px4_hil.config)).
:::
아래 다이어그램은 시뮬레이션 환경을 나타냅니다.
@@ -60,34 +59,59 @@ SITL은 시뮬레이션 환경의 컴퓨터에서 실행되며, 해당 환경에
## HITL 설정
+## Check if HITL is in Firmware
+
+The module required for HITL ([`pwm_out_sim`](../modules/modules_driver.md#pwm-out-sim)) is not built into all PX4 firmware by default.
+
+To check if the module is present on your Flight Controller:
+
+1. Open QGroundControl
+
+2. Open **Analyze Tools > Mavlink Console**.
+
+3. Type the following command in the console:
+
+ ```sh
+ pwm_out_sim status
+ ```
+
+4. If the returned value is `nsh: pwm_out_sim: command not found`, then you don't have the module installed.
+
+If `pwm_out_sim` is not present you will need to add it to the firmware in order to use HITL simulation.
+
+### Adding HITL modules to the Firmware
+
+Add the following key to the configuration file for your flight controller to include the required module (for an example see [boards/px4/fmu-v6x/default.px4board](https://github.com/PX4/PX4-Autopilot/blob/main/boards/px4/fmu-v6x/default.px4board)).
+Then re-build the firmware and flash it to the board.
+
+```text
+CONFIG_MODULES_SIMULATION_PWM_OUT_SIM=y
+```
+
+You can alternatively use the following command to launch a GUI configuration tool, and interactively enable them at the path: **modules > Simulation > pwm_out_sim**.
+For example, to update fmu-v6x you would use:
+
+```sh
+make px4_fmu-v6x boardconfig
+```
+
### PX4 설정
1. Connect the autopilot directly to _QGroundControl_ via USB.
-2. HITL 모드를 활성화합니다.
-
- 1. Open **Setup > Safety** section.
- 2. Enable HITL mode by selecting **Enabled** from the _HITL Enabled_ list:
-
- 
-
-3. 기체를 선택합니다.
-
+2. 기체를 선택합니다.
1. Open **Setup > Airframes**
2. Select a [compatible airframe](#compatible_airframe) you want to test.
Then click **Apply and Restart** on top-right of the _Airframe Setup_ page.
- 
-
-4. 필요한 경우 RC 또는 조이스틱을 보정합니다.
-
-5. UDP를 설정합니다.
+3. 필요한 경우 RC 또는 조이스틱을 보정합니다.
+4. UDP를 설정합니다.
1. Under the _General_ tab of the settings menu, uncheck all _AutoConnect_ boxes except for **UDP**.

-6. (선택 사항) 조이스틱과 안정장치를 설정합니다.
+5. (선택 사항) 조이스틱과 안정장치를 설정합니다.
Set the following [parameters](../advanced_config/parameters.md) in order to use a joystick instead of an RC remote control transmitter:
- [COM_RC_IN_MODE](../advanced_config/parameter_reference.md#COM_RC_IN_MODE) to "Joystick/No RC Checks". 이것은 조이스틱 입력을 허용하고, RC 입력을 비활성화합니다.
diff --git a/docs/ko/software_update/stm32_bootloader.md b/docs/ko/software_update/stm32_bootloader.md
index fd811e7a5a..f366dc337f 100644
--- a/docs/ko/software_update/stm32_bootloader.md
+++ b/docs/ko/software_update/stm32_bootloader.md
@@ -1,6 +1,6 @@
# STM32 부트로더
-The code for the PX4 bootloader is available from the Github [Bootloader](https://github.com/px4/bootloader) repository.
+The code for the PX4 bootloader is available from the Github [Bootloader](https://github.com/PX4/PX4-Bootloader) repository.
## 지원 보드
@@ -14,7 +14,7 @@ The code for the PX4 bootloader is available from the Github [Bootloader](https:
## 부트로더 빌드
```sh
-git clone https://github.com/PX4/Bootloader.git
+git clone https://github.com/PX4/PX4-Bootloader.git
cd Bootloader
git submodule init
git submodule update
@@ -29,7 +29,7 @@ make
The right power sequence is critical for some boards to allow JTAG / SWD access. 설명된 대로 정확히 다음 단계를 따르십시오.
:::
-아래 지침은 Blackmagic/Dronecode 프로브에 유효합니다.
+The instructions below are valid for a Blackmagic / Zubax BugFace BF1 probe.
다른 JTAG 프로브에는 유사한 단계가 필요합니다.
부트로더를 플래싱하는 개발자는 필요한 지식을 숙지하여야 합니다.
이 작업을 수행하는 방법을 모르는 경우에는 부트로더에 변경해야 할 사항이 있는지를 다 시 살펴보십시오.
@@ -40,7 +40,7 @@ The right power sequence is critical for some boards to allow JTAG / SWD access.
2. USB 전원 케이블 연결
3. JTAG 케이블 연결
-### 블랙 매직 / 드론코드 프로브
+### Black Magic / Zubax BugFace BF1 Probe
#### 올바른 직렬 포트 사용
diff --git a/docs/ko/telemetry/ark_microhard_serial.md b/docs/ko/telemetry/ark_microhard_serial.md
index e5d05d253e..d56de5d28d 100644
--- a/docs/ko/telemetry/ark_microhard_serial.md
+++ b/docs/ko/telemetry/ark_microhard_serial.md
@@ -1,6 +1,6 @@
# ARK Electron Microhard Serial Telemetry Radios
-_ARK Electron Microhard Serial Telemetry Radios_ integrate the [Microhard Pico Serial](http://microhardcorp.com/P900.php) P900 RF module.
+_ARK Electron Microhard Serial Telemetry Radios_ integrate the [Microhard Pico Serial](https://microhardcorp.com/P900.php) P900 RF module.
This can be used to enable MAVLink communication between a radio on a vehicle and a GCS.
Microhard Pico Serial radios are (up to) 1 Watt output radios that support point to point, point to multi-point, and mesh modes.
diff --git a/docs/ko/telemetry/crsf_telemetry.md b/docs/ko/telemetry/crsf_telemetry.md
index f4cb1b752b..ae50c40943 100644
--- a/docs/ko/telemetry/crsf_telemetry.md
+++ b/docs/ko/telemetry/crsf_telemetry.md
@@ -163,7 +163,7 @@ Transmitter modules:
Receivers:
-- [TBS Crossfire Nano RX](http://team-blacksheep.com/products/prod:crossfire_nano_rx) - designed for small quadcopters.
+- [TBS Crossfire Nano RX](https://www.team-blacksheep.com/products/prod:crossfire_nano_rx) - designed for small quadcopters.
## ExpressLRS Radio Systems
@@ -176,7 +176,7 @@ Transmitter modules:
Receivers:
-- [ExpressLRS Matek Diversity RX](http://www.mateksys.com/?portfolio=elrs-r24).
+- [ExpressLRS Matek Diversity RX](https://www.mateksys.com/?portfolio=elrs-r24).
::: info
This is used in the [Reptile Dragon 2 Build Log](../frames_plane/reptile_dragon_2.md).
diff --git a/docs/ko/telemetry/esp8266_wifi_module.md b/docs/ko/telemetry/esp8266_wifi_module.md
index 727bc061ad..0b005c3455 100644
--- a/docs/ko/telemetry/esp8266_wifi_module.md
+++ b/docs/ko/telemetry/esp8266_wifi_module.md
@@ -28,7 +28,7 @@ ESP8266 모듈은 여러 곳에서 쉽게 구매할 수 있습니다.
A plug and play ESP8266 module.
The Kahuna comes with a cable to connect directly to the Pixhawk-standard `TELEM1` or `TELEM2` ports.
- It is pre-flashed with the latest firmware, and has a u.fl connector for an external antenna.
+ It is pre-flashed with the latest firmware, and has a `u.fl` connector for an external antenna.
At most you may need to set the baud rate parameter, which for `TELEM1` is `SER_TEL1_BAUD = 57600 (57600 8N1)`.
The [User Guide](https://docs.google.com/document/d/1VyOsp9_q6dIAdYdWuDFcWoqqrNy_vbFMANubZA3Uz5g/edit?pli=1&tab=t.0) include WiFi setup and other relevant information.
@@ -115,13 +115,9 @@ If you have any problem connecting, see [QGC Usage Problems](https://docs.qgroun
다른 제조업체의 ESP8266 모듈에는 사전에 적절한 ESP8266 펌웨어가 설치되어 있지 않을 수 있습니다.
아래 지침은 적절한 버전으로 라디오를 업데이트 방법을 설명합니다.
-### 사전 빌드 바이너리
-
-[MavLink ESP8266 Firmware V 1.2.2](http://www.grubba.com/mavesp8266/firmware-1.2.2.bin)
-
### 소스 빌드
-The [firmware repository](https://github.com/dogmaphobic/mavesp8266) contains instructions and all the tools needed for building and flashing the ESP8266 firmware.
+The [firmware repository](https://github.com/BeyondRobotix/mavesp8266) contains instructions and all the tools needed for building and flashing the ESP8266 firmware.
### 펌웨어 OTA 업데이트
@@ -136,7 +132,7 @@ This is the easiest way to update firmware!
### ESP8266 펌웨어 플래싱
Before flashing, make sure you boot the ESP8266 in _Flash Mode_ as described below.
-If you cloned the [MavESP8266](https://github.com/dogmaphobic/mavesp8266) repository, you can build and flash the firmware using the provided [PlatformIO](http://platformio.org) tools and environment.
+If you cloned the [MavESP8266](https://github.com/BeyondRobotix/mavesp8266) repository, you can build and flash the firmware using the provided [PlatformIO](https://platformio.org/) tools and environment.
If you downloaded the pre-built firmware above, download the [esptool](https://github.com/espressif/esptool) utility and use the command line below:
```sh
diff --git a/docs/ko/telemetry/holybro_microhard_p900_radio.md b/docs/ko/telemetry/holybro_microhard_p900_radio.md
index 6847a1c817..38d4924fb2 100644
--- a/docs/ko/telemetry/holybro_microhard_p900_radio.md
+++ b/docs/ko/telemetry/holybro_microhard_p900_radio.md
@@ -1,6 +1,6 @@
# Holybro Microhard P900 Radio
-The [Holybro Microhard P900 Radio](https://holybro.com/products/microhard-radio) integrates the [Microhard Pico Serial](http://microhardcorp.com/P900.php) P900 RF module, which is capable of delivering high-performance wireless serial communications in robust and secure mesh, point-to-point or point-to-multipoint topologies.
+The [Holybro Microhard P900 Radio](https://holybro.com/products/microhard-radio) integrates the [Microhard Pico Serial](https://microhardcorp.com/P900.php) P900 RF module, which is capable of delivering high-performance wireless serial communications in robust and secure mesh, point-to-point or point-to-multipoint topologies.
It enables MAVLink communication between a radio on a vehicle and a GCS.
This radio operate within the 902-928 MHz ISM frequency band, using frequency hopping spread spectrum (FHSS) technology, providing reliable wireless asynchronous data transfer between most equipment types which employ a serial interface.
diff --git a/docs/ko/telemetry/microhard_serial.md b/docs/ko/telemetry/microhard_serial.md
index 31b526b13c..90672afb44 100644
--- a/docs/ko/telemetry/microhard_serial.md
+++ b/docs/ko/telemetry/microhard_serial.md
@@ -1,6 +1,6 @@
# Microhard 직렬 라디오
-[Microhard Pico Serial Radios](http://microhardcorp.com/P900.php) integrate the [Microhard Pico Serial](http://microhardcorp.com/P900.php) P900 RF module.
+[Microhard Pico Serial Radios](https://microhardcorp.com/P900.php) integrate the _Microhard Pico Serial_ P900 RF module.
기본 설정을 사용시, 출력이 1W로 설정의 대략적인 범위는 8km (5 마일)입니다.
단일 지상국 라디오를 사용하여 지점 대 다중 지점 또는 메시를 사용하여 여러 기체와 통신 가능합니다.
@@ -59,7 +59,7 @@ The screen shots below show the default radio configuration settings for connect

 -The [Pico Series P900.Operating Manual.v1.8.7](https://github.com/PX4/PX4-user_guide/raw/main/assets/hardware/telemetry/Pico-Series-P900.Operating-Manual.v1.8.7.pdf) has additional information on radio configuration (including mesh and multipoint modes).
+The [Pico Series P900.Operating Manual.v1.8.7](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/hardware/telemetry/Pico-Series-P900.Operating-Manual.v1.8.7.pdf) has additional information on radio configuration (including mesh and multipoint modes).
### Mesh and Multipoint Modes
diff --git a/docs/ko/telemetry/rfd900_telemetry.md b/docs/ko/telemetry/rfd900_telemetry.md
index 7d545dcff5..6012b29e5d 100644
--- a/docs/ko/telemetry/rfd900_telemetry.md
+++ b/docs/ko/telemetry/rfd900_telemetry.md
@@ -1,6 +1,6 @@
# RFD900 장거리 텔레메트리
-[jDrones](http://store.jDrones.com) and [RFDesign](http://rfdesign.com.au/) offer _long-range_ [SiK](../telemetry/sik_radio.md)-compatible telemetry radios.
+[jDrones](http://store.jDrones.com) and [RFDesign](https://rfdesign.com.au/) offer _long-range_ [SiK](../telemetry/sik_radio.md)-compatible telemetry radios.
라디오는 안테나와 5km 이상에서도 원활한 연결성을 제공합니다. 더 장거리에서도 통신 성공한 사례도 보고되었습니다.

@@ -10,7 +10,8 @@ _jDrones_ have productized _RFDesign_ modems (added a casing with power manageme
The first such modem was the _RFD900_, but both _RFDesign_ and _jDrones_ have since iterated to new versions.
:::
-The _jDrones_ radios have a JST-GH connector, and come with cables for: _JST-GH to JST-GH_ and _JST-GH to DF-13_. They can therefore be used in a "plug-n-play" way with most [Pixhawk Series](../flight_controller/pixhawk_series.md) controllers (you might have to change/use an appropriate connector for some "non-standard" boards).
+The _jDrones_ radios have a JST-GH connector, and come with cables for: _JST-GH to JST-GH_ and _JST-GH to DF-13_.
+They can therefore be used in a "plug-n-play" way with most [Pixhawk Series](../flight_controller/pixhawk_series.md) controllers (you might have to change/use an appropriate connector for some "non-standard" boards).
사용할 수 있는 버전은 다음과 같습니다.
diff --git a/docs/ko/test_and_ci/docker.md b/docs/ko/test_and_ci/docker.md
index c5a7e31b04..3e4bc144b0 100644
--- a/docs/ko/test_and_ci/docker.md
+++ b/docs/ko/test_and_ci/docker.md
@@ -35,15 +35,13 @@ sudo usermod -aG docker $USER
# Log in/out again before using docker!
```
-
+## Container Hierarchy {#px4_containers}
-## 컨테이너 계층
-
-The available containers are on [Github here](https://github.com/PX4/PX4-containers/tree/master?tab=readme-ov-file#container-hierarchy).
+The available containers are on [GitHub here](https://github.com/PX4/PX4-containers/tree/master?tab=readme-ov-file#container-hierarchy).
이를 통하여 다양한 빌드 대상 및 구성을 테스트할 수 있습니다(포함된 도구는 이름에서 유추할 수 있음).
The containers are hierarchical, such that containers have the functionality of their parents.
-For example, the partial hierarchy below shows that the docker container with nuttx build tools (`px4-dev-nuttx-focal`) does not include ROS 2, while the simulation containers do:
+For example, the partial hierarchy below shows that the docker container with NuttX build tools (`px4-dev-nuttx-focal`) does not include ROS 2, while the simulation containers do:
```plain
- px4io/px4-dev-base-focal
@@ -58,7 +56,7 @@ For example, the partial hierarchy below shows that the docker container with nu
The most recent version can be accessed using the `latest` tag: `px4io/px4-dev-nuttx-focal:latest`
(available tags are listed for each container on _hub.docker.com_.
-For example, the `px4io/px4-dev-nuttx-focal` tags can be found [here](https://hub.docker.com/r/px4io/px4-dev-nuttx-focal/tags?page=1&ordering=last_updated)).
+For example, the `px4io/px4-dev-nuttx-focal` tags can be found on [hub.docker.com here](https://hub.docker.com/r/px4io/px4-dev-nuttx-focal/tags?page=1&ordering=last_updated)).
:::tip
Typically you should use a recent container, but not necessarily the `latest` (as this changes too often).
@@ -97,9 +95,7 @@ For example, to build SITL you would call (from within the **/PX4-Autopilot** di
The script is easy because you don't need to know anything much about _Docker_ or think about what container to use. 그러나, 특별히 견고하지는 않습니다! The manual approach discussed in the [section below](#manual_start) is more flexible and should be used if you have any problems with the script.
:::
-
-
-### 도커 수동 호출
+### Calling Docker Manually {#manual_start}
일반적인 명령어 구문은 다음과 같습니다.
이것은 X 포워딩을 지원하는 Docker 컨테이너를 실행합니다(컨테이너 내부에서 시뮬레이션 GUI를 사용할 수 있게 함).
@@ -164,7 +160,8 @@ make px4_sitl_default gazebo-classic
### 컨테이너 재진입
-The `docker run` command can only be used to create a new container. 변경 사항을 유지하는 이 컨테이너로 돌아가려면 다음을 실행하십시오.
+The `docker run` command can only be used to create a new container.
+변경 사항을 유지하는 이 컨테이너로 돌아가려면 다음을 실행하십시오.
```sh
# start the container
@@ -193,9 +190,14 @@ docker rm 45eeb98f1dd9
### QGroundControl
-When running a simulation instance e.g. SITL inside the docker container and controlling it via _QGroundControl_ from the host, the communication link has to be set up manually. The autoconnect feature of _QGroundControl_ does not work here.
+When running a simulation instance e.g. SITL inside the docker container and controlling it via _QGroundControl_ from the host, the communication link has to be set up manually.
+The autoconnect feature of _QGroundControl_ does not work here.
-In _QGroundControl_, navigate to [Settings](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/settings_view/settings_view.html) and select Comm Links. ::: The port depends on the used [configuration](https://github.com/PX4/PX4-Autopilot/blob/main/ROMFS/px4fmu_common/init.d-posix/rcS) e.g. port 14570 for the SITL config. IP 주소는 도커 컨테이너 중 하나이며, 기본 네트워크는 172.17.0.1/16입니다. The IP address of the docker container can be found with the following command (assuming the container name is `mycontainer`):
+In _QGroundControl_, navigate to [Settings](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/settings_view/settings_view.html) and select Comm Links.
+:::
+The port depends on the used [configuration](https://github.com/PX4/PX4-Autopilot/blob/main/ROMFS/px4fmu_common/init.d-posix/rcS) e.g. port 14570 for the SITL config.
+IP 주소는 도커 컨테이너 중 하나이며, 기본 네트워크는 172.17.0.1/16입니다.
+The IP address of the docker container can be found with the following command (assuming the container name is `mycontainer`):
```sh
$ docker inspect -f '{ {range .NetworkSettings.Networks}}{ {.IPAddress}}{ {end}}' mycontainer
@@ -209,9 +211,11 @@ Spaces between double curly braces above should be not be present (they are need
#### 권한 에러
-컨테이너는 기본 사용자(일반적으로 "루트") 계정으로 파일을 생성합니다. 이것 때문에, 호스트 컴퓨터의 사용자가 컨테이너에서 생성한 파일에 액세스할 수 없는 상황이 발생합니다.
+컨테이너는 기본 사용자(일반적으로 "루트") 계정으로 파일을 생성합니다.
+이것 때문에, 호스트 컴퓨터의 사용자가 컨테이너에서 생성한 파일에 액세스할 수 없는 상황이 발생합니다.
-The example above uses the line `--env=LOCAL_USER_ID="$(id -u)"` to create a user in the container with the same UID as the user on the host. 이렇게 하면 컨테이너 내에서 생성된 모든 파일을 호스트에서 액세스할 수 있습니다.
+The example above uses the line `--env=LOCAL_USER_ID="$(id -u)"` to create a user in the container with the same UID as the user on the host.
+이렇게 하면 컨테이너 내에서 생성된 모든 파일을 호스트에서 액세스할 수 있습니다.
#### 그래픽 드라이버 문제
@@ -221,17 +225,15 @@ It's possible that running Gazebo Classic will result in a similar error message
libGL error: failed to load driver: swrast
```
-이 경우 호스트 시스템의 기본 그래픽 드라이버를 설치합니다. 올바른 드라이버를 다운로드하여 컨테이너 내부에 설치합니다. Nvidia 드라이버의 경우 다음 명령어를 사용합니다(그렇지 않으면 설치 프로그램이 호스트에서 로드된 모듈을 보고 진행을 거부합니다).
+이 경우 호스트 시스템의 기본 그래픽 드라이버를 설치합니다.
+올바른 드라이버를 다운로드하여 컨테이너 내부에 설치합니다.
+Nvidia 드라이버의 경우 다음 명령어를 사용합니다(그렇지 않으면 설치 프로그램이 호스트에서 로드된 모듈을 보고 진행을 거부합니다).
```sh
./NVIDIA-DRIVER.run -a -N --ui=none --no-kernel-module
```
-More information on this can be found [here](http://gernotklingler.com/blog/howto-get-hardware-accelerated-opengl-support-docker/).
-
-
-
-## 가상 머신 지원
+## Virtual Machine Support {#virtual_machine}
최신 Linux 배포판에서는 정상적으로 작동하여야 합니다.
diff --git a/docs/ko/test_and_ci/integration_testing_mavsdk.md b/docs/ko/test_and_ci/integration_testing_mavsdk.md
index 060360e64d..4b0211c9cf 100644
--- a/docs/ko/test_and_ci/integration_testing_mavsdk.md
+++ b/docs/ko/test_and_ci/integration_testing_mavsdk.md
@@ -162,4 +162,4 @@ About to run 39 test cases for 3 selected models (1 iteration):
사용된 용어:
- "model": This is the selected Gazebo model, e.g. `iris`.
-- "test case": This is a [catch2 test case](https://github.com/catchorg/Catch2/blob/master/docs/test-cases-and-sections.md).
+- "test case": This is a [catch2 test case](https://github.com/catchorg/Catch2/blob/devel/docs/test-cases-and-sections.md).
diff --git a/docs/ko/test_and_ci/integration_testing_ros1_mavros.md b/docs/ko/test_and_ci/integration_testing_ros1_mavros.md
index d087cf99f5..1097c246fb 100644
--- a/docs/ko/test_and_ci/integration_testing_ros1_mavros.md
+++ b/docs/ko/test_and_ci/integration_testing_ros1_mavros.md
@@ -59,7 +59,7 @@ The **.test** files launch the corresponding Python tests defined in `integratio
This section explains how to write a new python test using ROS 1/MAVROS, test it, and add it to the PX4 test suite.
We recommend you review the existing tests as examples/inspiration ([integrationtests/python_src/px4_it/mavros/](https://github.com/PX4/PX4-Autopilot/tree/main/integrationtests/python_src/px4_it/mavros)).
-The official ROS documentation also contains information on how to use [unittest](http://wiki.ros.org/unittest) (on which this test suite is based).
+The official ROS documentation also contains information on how to use [unittest](https://wiki.ros.org/unittest) (on which this test suite is based).
To write a new test:
@@ -117,25 +117,23 @@ To write a new test:
```
2. Run the new test only
-
- Start the simulator:
- ```sh
- cd
- source Tools/simulation/gazebo/setup_gazebo.bash
- roslaunch launch/mavros_posix_sitl.launch
- ```
+ ```sh
+ cd
+ source Tools/simulation/gazebo/setup_gazebo.bash
+ roslaunch launch/mavros_posix_sitl.launch
+ ```
- Run test (in a new shell):
- ```sh
- cd
- source Tools/simulation/gazebo/setup_gazebo.bash
- rosrun px4 mavros_new_test.py
- ```
+ ```sh
+ cd
+ source Tools/simulation/gazebo/setup_gazebo.bash
+ rosrun px4 mavros_new_test.py
+ ```
3. Add new test node to a launch file
-
- In `test/` create a new `.test` ROS launch file.
- Call the test file using one of the base scripts _rostest_px4_run.sh_ or _rostest_avoidance_run.sh_
diff --git a/docs/ko/tutorials/motion-capture.md b/docs/ko/tutorials/motion-capture.md
index d4e6c40608..a36758190e 100644
--- a/docs/ko/tutorials/motion-capture.md
+++ b/docs/ko/tutorials/motion-capture.md
@@ -44,7 +44,7 @@ See [Switching State Estimators](../advanced/switching_state_estimators.md) for
### EKF2
The ROS topic for motion cap `mocap_pose_estimate` for mocap systems and `vision_pose_estimate` for vision.
-Check [mavros_extras](http://wiki.ros.org/mavros_extras) for further info.
+Check [mavros_extras](https://wiki.ros.org/mavros_extras) for further info.
## 시험
-The [Pico Series P900.Operating Manual.v1.8.7](https://github.com/PX4/PX4-user_guide/raw/main/assets/hardware/telemetry/Pico-Series-P900.Operating-Manual.v1.8.7.pdf) has additional information on radio configuration (including mesh and multipoint modes).
+The [Pico Series P900.Operating Manual.v1.8.7](https://github.com/PX4/PX4-Autopilot/raw/main/docs/assets/hardware/telemetry/Pico-Series-P900.Operating-Manual.v1.8.7.pdf) has additional information on radio configuration (including mesh and multipoint modes).
### Mesh and Multipoint Modes
diff --git a/docs/ko/telemetry/rfd900_telemetry.md b/docs/ko/telemetry/rfd900_telemetry.md
index 7d545dcff5..6012b29e5d 100644
--- a/docs/ko/telemetry/rfd900_telemetry.md
+++ b/docs/ko/telemetry/rfd900_telemetry.md
@@ -1,6 +1,6 @@
# RFD900 장거리 텔레메트리
-[jDrones](http://store.jDrones.com) and [RFDesign](http://rfdesign.com.au/) offer _long-range_ [SiK](../telemetry/sik_radio.md)-compatible telemetry radios.
+[jDrones](http://store.jDrones.com) and [RFDesign](https://rfdesign.com.au/) offer _long-range_ [SiK](../telemetry/sik_radio.md)-compatible telemetry radios.
라디오는 안테나와 5km 이상에서도 원활한 연결성을 제공합니다. 더 장거리에서도 통신 성공한 사례도 보고되었습니다.

@@ -10,7 +10,8 @@ _jDrones_ have productized _RFDesign_ modems (added a casing with power manageme
The first such modem was the _RFD900_, but both _RFDesign_ and _jDrones_ have since iterated to new versions.
:::
-The _jDrones_ radios have a JST-GH connector, and come with cables for: _JST-GH to JST-GH_ and _JST-GH to DF-13_. They can therefore be used in a "plug-n-play" way with most [Pixhawk Series](../flight_controller/pixhawk_series.md) controllers (you might have to change/use an appropriate connector for some "non-standard" boards).
+The _jDrones_ radios have a JST-GH connector, and come with cables for: _JST-GH to JST-GH_ and _JST-GH to DF-13_.
+They can therefore be used in a "plug-n-play" way with most [Pixhawk Series](../flight_controller/pixhawk_series.md) controllers (you might have to change/use an appropriate connector for some "non-standard" boards).
사용할 수 있는 버전은 다음과 같습니다.
diff --git a/docs/ko/test_and_ci/docker.md b/docs/ko/test_and_ci/docker.md
index c5a7e31b04..3e4bc144b0 100644
--- a/docs/ko/test_and_ci/docker.md
+++ b/docs/ko/test_and_ci/docker.md
@@ -35,15 +35,13 @@ sudo usermod -aG docker $USER
# Log in/out again before using docker!
```
-
+## Container Hierarchy {#px4_containers}
-## 컨테이너 계층
-
-The available containers are on [Github here](https://github.com/PX4/PX4-containers/tree/master?tab=readme-ov-file#container-hierarchy).
+The available containers are on [GitHub here](https://github.com/PX4/PX4-containers/tree/master?tab=readme-ov-file#container-hierarchy).
이를 통하여 다양한 빌드 대상 및 구성을 테스트할 수 있습니다(포함된 도구는 이름에서 유추할 수 있음).
The containers are hierarchical, such that containers have the functionality of their parents.
-For example, the partial hierarchy below shows that the docker container with nuttx build tools (`px4-dev-nuttx-focal`) does not include ROS 2, while the simulation containers do:
+For example, the partial hierarchy below shows that the docker container with NuttX build tools (`px4-dev-nuttx-focal`) does not include ROS 2, while the simulation containers do:
```plain
- px4io/px4-dev-base-focal
@@ -58,7 +56,7 @@ For example, the partial hierarchy below shows that the docker container with nu
The most recent version can be accessed using the `latest` tag: `px4io/px4-dev-nuttx-focal:latest`
(available tags are listed for each container on _hub.docker.com_.
-For example, the `px4io/px4-dev-nuttx-focal` tags can be found [here](https://hub.docker.com/r/px4io/px4-dev-nuttx-focal/tags?page=1&ordering=last_updated)).
+For example, the `px4io/px4-dev-nuttx-focal` tags can be found on [hub.docker.com here](https://hub.docker.com/r/px4io/px4-dev-nuttx-focal/tags?page=1&ordering=last_updated)).
:::tip
Typically you should use a recent container, but not necessarily the `latest` (as this changes too often).
@@ -97,9 +95,7 @@ For example, to build SITL you would call (from within the **/PX4-Autopilot** di
The script is easy because you don't need to know anything much about _Docker_ or think about what container to use. 그러나, 특별히 견고하지는 않습니다! The manual approach discussed in the [section below](#manual_start) is more flexible and should be used if you have any problems with the script.
:::
-
-
-### 도커 수동 호출
+### Calling Docker Manually {#manual_start}
일반적인 명령어 구문은 다음과 같습니다.
이것은 X 포워딩을 지원하는 Docker 컨테이너를 실행합니다(컨테이너 내부에서 시뮬레이션 GUI를 사용할 수 있게 함).
@@ -164,7 +160,8 @@ make px4_sitl_default gazebo-classic
### 컨테이너 재진입
-The `docker run` command can only be used to create a new container. 변경 사항을 유지하는 이 컨테이너로 돌아가려면 다음을 실행하십시오.
+The `docker run` command can only be used to create a new container.
+변경 사항을 유지하는 이 컨테이너로 돌아가려면 다음을 실행하십시오.
```sh
# start the container
@@ -193,9 +190,14 @@ docker rm 45eeb98f1dd9
### QGroundControl
-When running a simulation instance e.g. SITL inside the docker container and controlling it via _QGroundControl_ from the host, the communication link has to be set up manually. The autoconnect feature of _QGroundControl_ does not work here.
+When running a simulation instance e.g. SITL inside the docker container and controlling it via _QGroundControl_ from the host, the communication link has to be set up manually.
+The autoconnect feature of _QGroundControl_ does not work here.
-In _QGroundControl_, navigate to [Settings](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/settings_view/settings_view.html) and select Comm Links. ::: The port depends on the used [configuration](https://github.com/PX4/PX4-Autopilot/blob/main/ROMFS/px4fmu_common/init.d-posix/rcS) e.g. port 14570 for the SITL config. IP 주소는 도커 컨테이너 중 하나이며, 기본 네트워크는 172.17.0.1/16입니다. The IP address of the docker container can be found with the following command (assuming the container name is `mycontainer`):
+In _QGroundControl_, navigate to [Settings](https://docs.qgroundcontrol.com/master/en/qgc-user-guide/settings_view/settings_view.html) and select Comm Links.
+:::
+The port depends on the used [configuration](https://github.com/PX4/PX4-Autopilot/blob/main/ROMFS/px4fmu_common/init.d-posix/rcS) e.g. port 14570 for the SITL config.
+IP 주소는 도커 컨테이너 중 하나이며, 기본 네트워크는 172.17.0.1/16입니다.
+The IP address of the docker container can be found with the following command (assuming the container name is `mycontainer`):
```sh
$ docker inspect -f '{ {range .NetworkSettings.Networks}}{ {.IPAddress}}{ {end}}' mycontainer
@@ -209,9 +211,11 @@ Spaces between double curly braces above should be not be present (they are need
#### 권한 에러
-컨테이너는 기본 사용자(일반적으로 "루트") 계정으로 파일을 생성합니다. 이것 때문에, 호스트 컴퓨터의 사용자가 컨테이너에서 생성한 파일에 액세스할 수 없는 상황이 발생합니다.
+컨테이너는 기본 사용자(일반적으로 "루트") 계정으로 파일을 생성합니다.
+이것 때문에, 호스트 컴퓨터의 사용자가 컨테이너에서 생성한 파일에 액세스할 수 없는 상황이 발생합니다.
-The example above uses the line `--env=LOCAL_USER_ID="$(id -u)"` to create a user in the container with the same UID as the user on the host. 이렇게 하면 컨테이너 내에서 생성된 모든 파일을 호스트에서 액세스할 수 있습니다.
+The example above uses the line `--env=LOCAL_USER_ID="$(id -u)"` to create a user in the container with the same UID as the user on the host.
+이렇게 하면 컨테이너 내에서 생성된 모든 파일을 호스트에서 액세스할 수 있습니다.
#### 그래픽 드라이버 문제
@@ -221,17 +225,15 @@ It's possible that running Gazebo Classic will result in a similar error message
libGL error: failed to load driver: swrast
```
-이 경우 호스트 시스템의 기본 그래픽 드라이버를 설치합니다. 올바른 드라이버를 다운로드하여 컨테이너 내부에 설치합니다. Nvidia 드라이버의 경우 다음 명령어를 사용합니다(그렇지 않으면 설치 프로그램이 호스트에서 로드된 모듈을 보고 진행을 거부합니다).
+이 경우 호스트 시스템의 기본 그래픽 드라이버를 설치합니다.
+올바른 드라이버를 다운로드하여 컨테이너 내부에 설치합니다.
+Nvidia 드라이버의 경우 다음 명령어를 사용합니다(그렇지 않으면 설치 프로그램이 호스트에서 로드된 모듈을 보고 진행을 거부합니다).
```sh
./NVIDIA-DRIVER.run -a -N --ui=none --no-kernel-module
```
-More information on this can be found [here](http://gernotklingler.com/blog/howto-get-hardware-accelerated-opengl-support-docker/).
-
-
-
-## 가상 머신 지원
+## Virtual Machine Support {#virtual_machine}
최신 Linux 배포판에서는 정상적으로 작동하여야 합니다.
diff --git a/docs/ko/test_and_ci/integration_testing_mavsdk.md b/docs/ko/test_and_ci/integration_testing_mavsdk.md
index 060360e64d..4b0211c9cf 100644
--- a/docs/ko/test_and_ci/integration_testing_mavsdk.md
+++ b/docs/ko/test_and_ci/integration_testing_mavsdk.md
@@ -162,4 +162,4 @@ About to run 39 test cases for 3 selected models (1 iteration):
사용된 용어:
- "model": This is the selected Gazebo model, e.g. `iris`.
-- "test case": This is a [catch2 test case](https://github.com/catchorg/Catch2/blob/master/docs/test-cases-and-sections.md).
+- "test case": This is a [catch2 test case](https://github.com/catchorg/Catch2/blob/devel/docs/test-cases-and-sections.md).
diff --git a/docs/ko/test_and_ci/integration_testing_ros1_mavros.md b/docs/ko/test_and_ci/integration_testing_ros1_mavros.md
index d087cf99f5..1097c246fb 100644
--- a/docs/ko/test_and_ci/integration_testing_ros1_mavros.md
+++ b/docs/ko/test_and_ci/integration_testing_ros1_mavros.md
@@ -59,7 +59,7 @@ The **.test** files launch the corresponding Python tests defined in `integratio
This section explains how to write a new python test using ROS 1/MAVROS, test it, and add it to the PX4 test suite.
We recommend you review the existing tests as examples/inspiration ([integrationtests/python_src/px4_it/mavros/](https://github.com/PX4/PX4-Autopilot/tree/main/integrationtests/python_src/px4_it/mavros)).
-The official ROS documentation also contains information on how to use [unittest](http://wiki.ros.org/unittest) (on which this test suite is based).
+The official ROS documentation also contains information on how to use [unittest](https://wiki.ros.org/unittest) (on which this test suite is based).
To write a new test:
@@ -117,25 +117,23 @@ To write a new test:
```
2. Run the new test only
-
- Start the simulator:
- ```sh
- cd
- source Tools/simulation/gazebo/setup_gazebo.bash
- roslaunch launch/mavros_posix_sitl.launch
- ```
+ ```sh
+ cd
+ source Tools/simulation/gazebo/setup_gazebo.bash
+ roslaunch launch/mavros_posix_sitl.launch
+ ```
- Run test (in a new shell):
- ```sh
- cd
- source Tools/simulation/gazebo/setup_gazebo.bash
- rosrun px4 mavros_new_test.py
- ```
+ ```sh
+ cd
+ source Tools/simulation/gazebo/setup_gazebo.bash
+ rosrun px4 mavros_new_test.py
+ ```
3. Add new test node to a launch file
-
- In `test/` create a new `.test` ROS launch file.
- Call the test file using one of the base scripts _rostest_px4_run.sh_ or _rostest_avoidance_run.sh_
diff --git a/docs/ko/tutorials/motion-capture.md b/docs/ko/tutorials/motion-capture.md
index d4e6c40608..a36758190e 100644
--- a/docs/ko/tutorials/motion-capture.md
+++ b/docs/ko/tutorials/motion-capture.md
@@ -44,7 +44,7 @@ See [Switching State Estimators](../advanced/switching_state_estimators.md) for
### EKF2
The ROS topic for motion cap `mocap_pose_estimate` for mocap systems and `vision_pose_estimate` for vision.
-Check [mavros_extras](http://wiki.ros.org/mavros_extras) for further info.
+Check [mavros_extras](https://wiki.ros.org/mavros_extras) for further info.
## 시험